Launch VINS-Mono with Realsense D435i in RTAB-Map
Preparation:
- Remap topic from D435i to rtabmap
- Feed the odometry to rtabmap
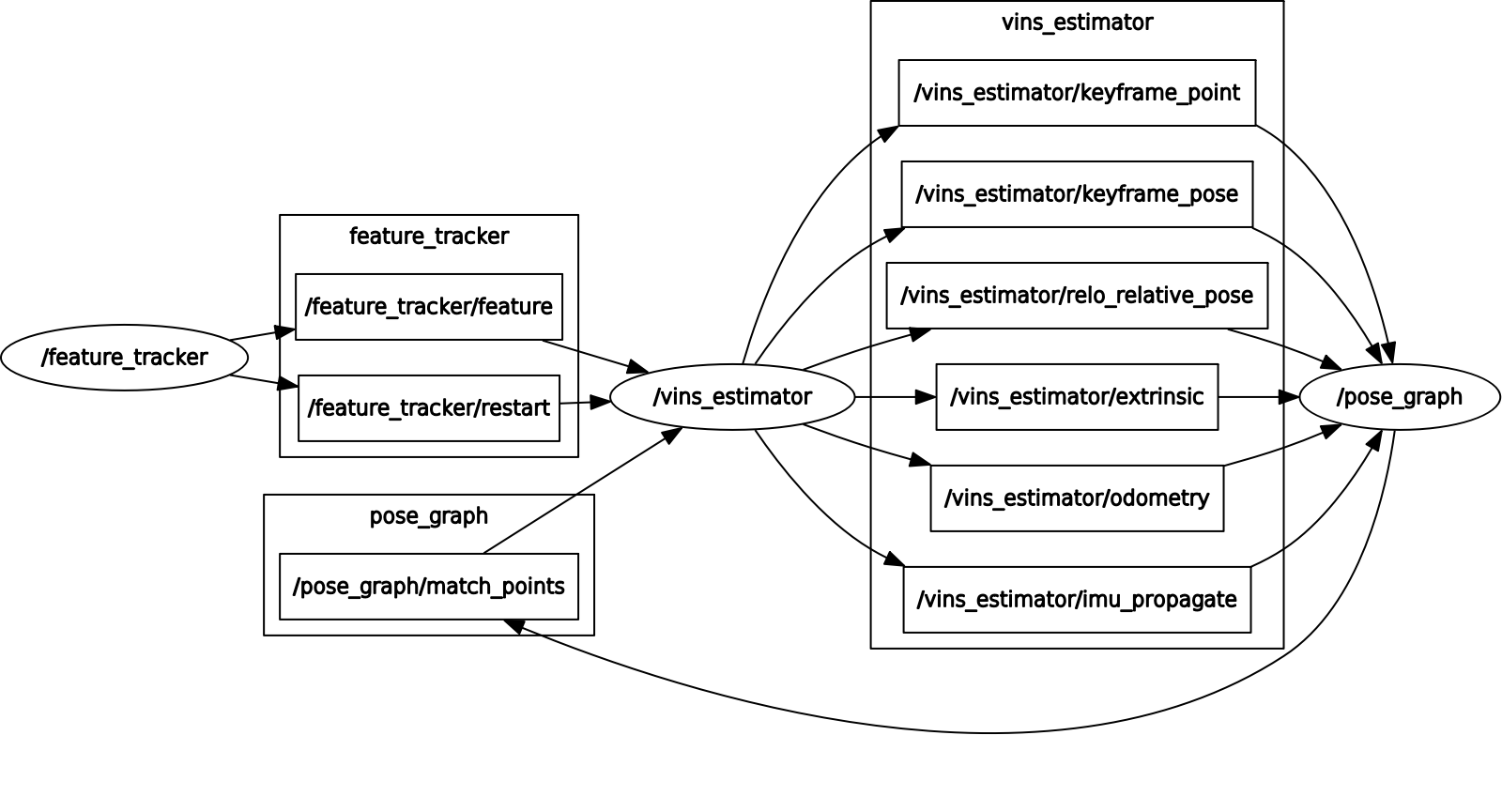
In the rqt_graph of vins_estimator, topic /vins_estimator/odometry is what rtabmap needs.
Running
Launch rtabmap:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=false odom_topic:=/vins_estimator/odometry
Launch vins:
roslaunch vins_estimator realsense_color.launch
Launch realsense d434i:
roslaunch realsense2_camera rs_camera.launch
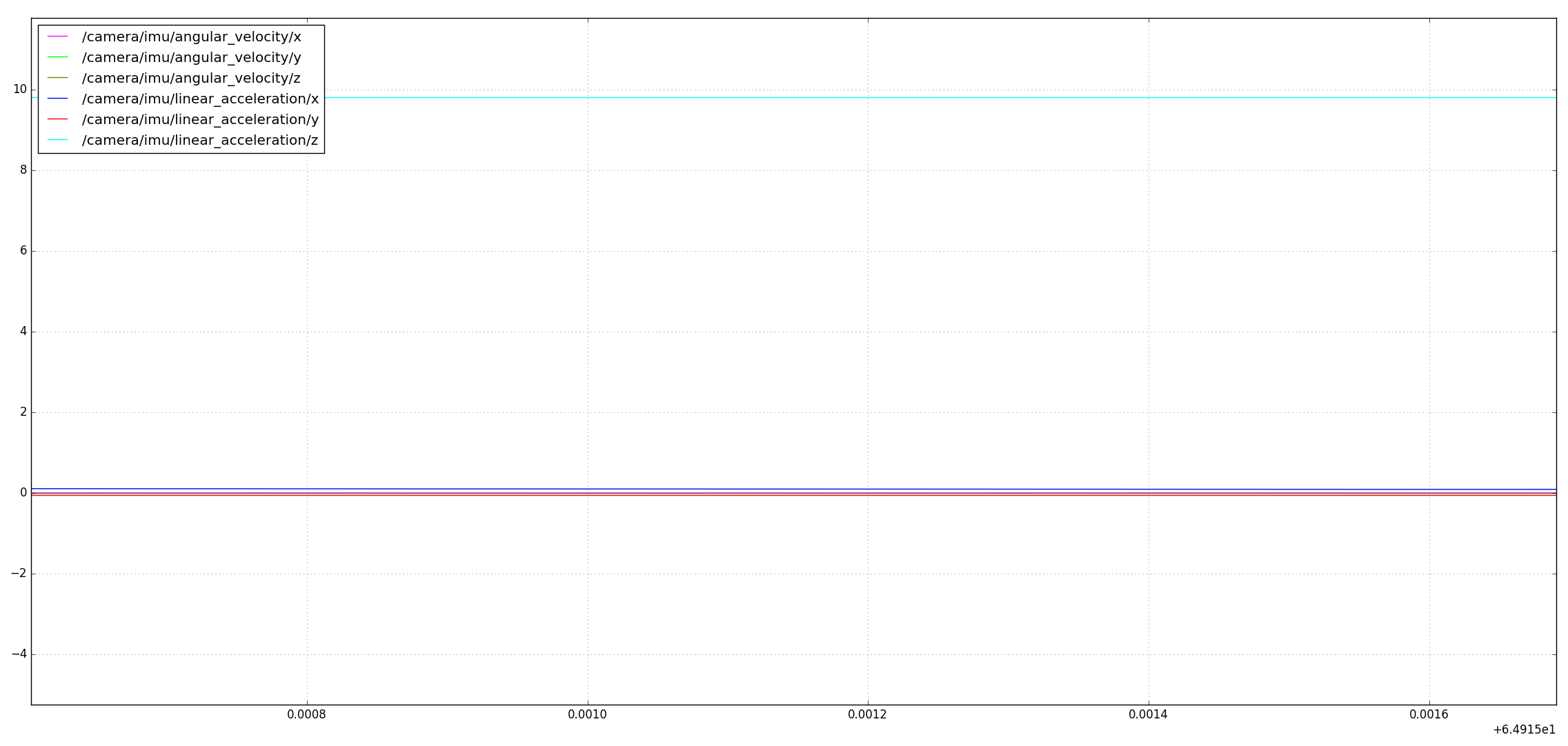
In addition, drifting of imu can be seen in rqt_plot by:
rqt_plot /camera/imu/linear_acceleration/x:y:z /camera/imu/angular_velocity/x:y:z
rosbag record
rosbag record -O wh_test /tf_static /camera/aligned_depth_to_color/image_raw /camera/color/image_raw /camera/color/camera_info /vins_estimator/odometry
Note that never forget topic /tf_static. It can be seen in rqt_graph when rtabmap was run successfully.
References:
[1] RGB-D Handheld Mapping
[2] 如何用Realsense D435i运行VINS-Mono等VIO算法 获取IMU同步数据
Launch VINS-Mono with Realsense D435i in RTAB-Map的更多相关文章
- VIN-Fusion config with Realsense D435i
### First shot Copy the .launch file in package VINS-Fusion to the directory of realsense2_cameara/l ...
- Launch VINS example (Euroc dataset) in RTAB-MAP
$ roslaunch rtabmap_ros euroc_datasets.launch args:="-d RGBD/CreateOccupancyGrid false Odom/Str ...
- Ubuntu 16.04 + Realsense D435i + ROS 环境配置
参考: [1] Realsense-Ros: https://github.com/IntelRealSense/realsense-ros#installation-instructions [2] ...
- realsense d435i問題太多了
Selecting Windows SDK version 10.0.17134.0 to target Windows 10.0.18362. Internet connection identif ...
- ROS kinetic + Realsens D435i + ORK + LINEMOD 物体识别
1. ORK 网址:https://wg-perception.github.io/object_recognition_core/ ORK (Object Recognition Kitchen) ...
- 基于Mono和VSCode打造轻量级跨平台IDE
近期Visual Studio推出Mac版本号的消息迅速在技术圈里刷屏,当project师们最喜欢的笔记本电脑Mac,邂逅地球上最强大的集成开发环境Visual Studio的时候,会碰撞出如何精 ...
- Kalibr installation tutorial
How to install Kalibr I was confused about installing Kalibr, but there is no even one hint in READM ...
- 三维视觉惯性SLAM的有效Schmidt-EKF
三维视觉惯性SLAM的有效Schmidt-EKF An Efficient Schmidt-EKF for 3D Visual-Inertial SLAM 论文地址: http://openaccess ...
- server computer (实验室移动服务器环境)
star@xmatrix:~$ lshwWARNING: you should run this program as super-user.xmatrix ...
随机推荐
- a标签什么时候可以设置宽高
行内元素(如a标签),在文档流中的时候因为是行内元素所以无法设置宽高:而当设置了绝对定位或者浮动,会生成块框(即变成块元素),所以就可以设置宽高了
- java成神之——集合框架之Array
Array 初始化 填充元素的几种方式 数组转流 遍历 数组转成字符串 排序 查找 数组扩大 原始类型数组和包装类型数组转换 移除元素 比较数组是否相等 克隆 类型转换 过滤元素 结语 Array 初 ...
- HALCON 算子函数(四) File
HALCON 算子函数——Chapter 4 : File 4.1 Images 1. read_image 功能:读取有不同文件格式的图像. 2. read_sequence 功能:读取图像. 3. ...
- [原创]Java项目统一UTC时间方案
Java项目统一UTC时间方案 作者:Gods_巨蚁 引言 近期团队的个别项目在进行框架升级后,部分时间值存在8小时误差,原因是错误的将数据库中的时间数据理解成了UTC时间(旧版本认为是北京时间) 考 ...
- ELK(Elasticsearch/Logstash/Kibana)安装时常见错误总结
问题一: [2016-11-06T16:27:21,712][WARN ][o.e.b.JNANatives ] unable to install syscall filter: Java.lang ...
- centos7使用frabric自动化部署LNMP
1.创建lnmp.py文件 $ vim lnmp.py ------------------------> #!/usr/bin/env python from fabric.colors im ...
- Android输入法部分遮挡UI的问题(与EditText框相切)
首先,我们来看看遇到问题的图片 遇到的问题是,当点击输入框之后,输入法会切到红线的位置,理想状态应该是在绿线位置 那么,是什么原因造成的呢? 问题其实很简单,是因为drawableleft图片比该输入 ...
- Ant之build.xml详解---可用
Ant的概念 :在Eclipse中使用Ant Ant是Java平台下非常棒的批处理命令执行程序,能非常方便地自动完成编译,测试,打包,部署等等一系列任务,大大提高开发效率. Ant和make命令很像. ...
- Linux常用基本命令 1
useradd 创建用户. password 修改密码. date 查看时间 man date 帮助文档.f往后翻 b往前翻 q退出.软修改 man hwclock 修改硬件时钟, cal 查看日历 ...
- MyBatis—实现关联表查询
一.一对一关联 1.1.提出需求 根据班级id查询班级信息(带老师的信息) 1.2.创建表和数据 创建一张教师表和班级表,这里我们假设一个老师只负责教一个班,那么老师和班级之间的关系就是一种一对一的关 ...