Launch VINS-Mono with Realsense D435i in RTAB-Map
Preparation:
- Remap topic from D435i to rtabmap
- Feed the odometry to rtabmap
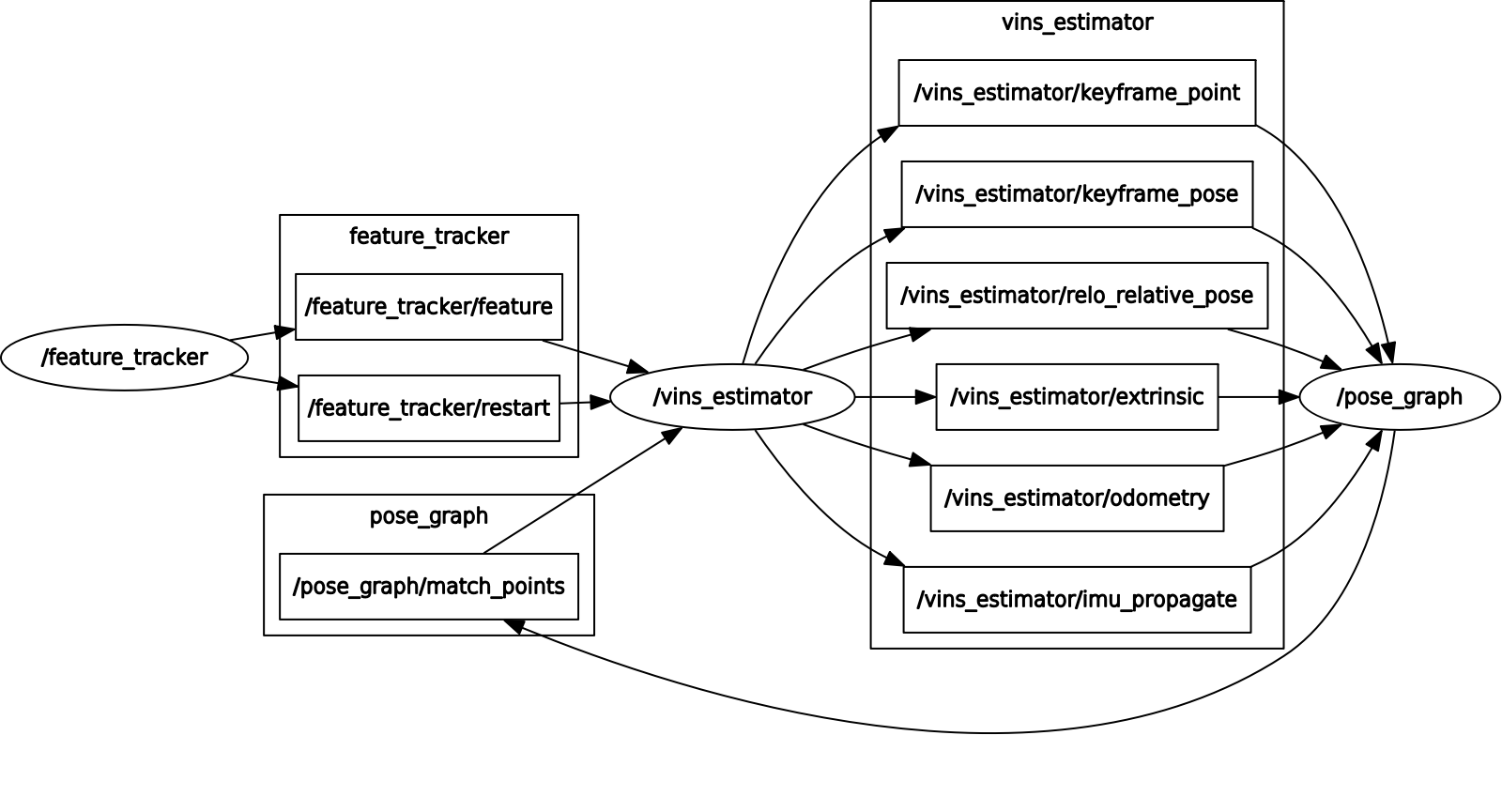
In the rqt_graph of vins_estimator, topic /vins_estimator/odometry is what rtabmap needs.
Running
Launch rtabmap:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=false odom_topic:=/vins_estimator/odometry
Launch vins:
roslaunch vins_estimator realsense_color.launch
Launch realsense d434i:
roslaunch realsense2_camera rs_camera.launch
In addition, drifting of imu can be seen in rqt_plot by:
rqt_plot /camera/imu/linear_acceleration/x:y:z /camera/imu/angular_velocity/x:y:z
rosbag record
rosbag record -O wh_test /tf_static /camera/aligned_depth_to_color/image_raw /camera/color/image_raw /camera/color/camera_info /vins_estimator/odometry
Note that never forget topic /tf_static. It can be seen in rqt_graph when rtabmap was run successfully.
References:
[1] RGB-D Handheld Mapping
[2] 如何用Realsense D435i运行VINS-Mono等VIO算法 获取IMU同步数据
Launch VINS-Mono with Realsense D435i in RTAB-Map的更多相关文章
- VIN-Fusion config with Realsense D435i
### First shot Copy the .launch file in package VINS-Fusion to the directory of realsense2_cameara/l ...
- Launch VINS example (Euroc dataset) in RTAB-MAP
$ roslaunch rtabmap_ros euroc_datasets.launch args:="-d RGBD/CreateOccupancyGrid false Odom/Str ...
- Ubuntu 16.04 + Realsense D435i + ROS 环境配置
参考: [1] Realsense-Ros: https://github.com/IntelRealSense/realsense-ros#installation-instructions [2] ...
- realsense d435i問題太多了
Selecting Windows SDK version 10.0.17134.0 to target Windows 10.0.18362. Internet connection identif ...
- ROS kinetic + Realsens D435i + ORK + LINEMOD 物体识别
1. ORK 网址:https://wg-perception.github.io/object_recognition_core/ ORK (Object Recognition Kitchen) ...
- 基于Mono和VSCode打造轻量级跨平台IDE
近期Visual Studio推出Mac版本号的消息迅速在技术圈里刷屏,当project师们最喜欢的笔记本电脑Mac,邂逅地球上最强大的集成开发环境Visual Studio的时候,会碰撞出如何精 ...
- Kalibr installation tutorial
How to install Kalibr I was confused about installing Kalibr, but there is no even one hint in READM ...
- 三维视觉惯性SLAM的有效Schmidt-EKF
三维视觉惯性SLAM的有效Schmidt-EKF An Efficient Schmidt-EKF for 3D Visual-Inertial SLAM 论文地址: http://openaccess ...
- server computer (实验室移动服务器环境)
star@xmatrix:~$ lshwWARNING: you should run this program as super-user.xmatrix ...
随机推荐
- 学习 altera官网 之 timequest
1.如果启动沿(launch)和锁存沿(latch)是同一时钟域则,latch比launch晚一个时钟周期. 2.数据到达时间 3.时钟到达时间.如果启动沿(launch edge)和锁存沿(latc ...
- Metasploit自动化脚本Ezsploit
打开文件夹并赋予权限 ┌─[root@sch01ar]─[~] └──╼ #cd /sch01ar/ezsploit/ && ls ezsploit.sh README.md ┌─[r ...
- 使用PreparedStatement接口实现增删改操作
直接上下代码: package com.learn.jdbc.chap04.sec02; import java.sql.Connection; import java.sql.PreparedSta ...
- Android控件使用自定义字体
我们不可能只满足于系统自带的字体(太丑),其实控件自定义字体也很简单.. 1.首先找到该字体的ttf文件. 2.把字体文件放在scr/mian/assets/fonts下,如果没有该路径则自己创建. ...
- 《转》我的ARM学习经历
1.基础阶段 话说06年第一份工作从事的是PLC开发,用protel画原理图和PCB,写AVR单片机程序,焊焊板子,还去过华强北买器件,比较杂,但是接触面比较广,为进一步学ARM打下了基础. ...
- Linux主机名的设置
Linux主机名的设置 Linux主机名的设置步骤如下: 1.在/etc/sysconfig/network文件中修改HOSTNAME的值为要设置的主机名. HOSTNAME=myhost 2.在/e ...
- OSCache-JSP页面缓存(1)
一.OSCache提供的缓存标签 这是OSCache提供的标签库中最重要的一个标签,包括在标签中的内容将应用缓存机制进行处理,处理的方式将取决于编程者对cache标签属性的设置. 第一次请求到达时,标 ...
- android解析xml文件的方式
android解析xml文件的方式 作者:东子哥 ,发布于2012-11-26,来源:博客园 在androd手机中处理xml数据时很常见的事情,通常在不同平台传输数据的时候,我们就可能使用xm ...
- 2014蓝桥杯B组初赛试题《六角填数》
题目描述: 如图[1.png]所示六角形中,填入1~12的数字. 使得每条直线上的数字之和都相同. 图中,已经替你填好了3个数字,请你计算星号位置所代表的数字是多少? 请通过浏览器提交 ...
- 23-单词数(HDU2070)
单词数 Time Limit: 1000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Total Submiss ...