[状态机]嵌入式设计模式:有限状态自动机的C语言实现
转自:http://www.cnblogs.com/autosar/archive/2012/06/22/2558604.html
状态机模式是一种行为模式,在《设计模式》这本书中对其有详细的描述,通过多态实现不同状态的调转行为的确是一种很好的方法,只可惜在嵌入式环境下,有时只能写纯C代码,并且还需要考虑代码的重入和多任务请求跳转等情形,因此实现起来着实需要一番考虑。
近日在看了一个开源系统时,看到了一个状态机的实现,也学着写了一个,与大家分享。
首先,分析一下一个普通的状态机究竟要实现哪些内容。
状态机存储从开始时刻到现在的变化,并根据当前输入,决定下一个状态。这意味着,状态机要存储状态、获得输入(我们把它叫做跳转条件)、做出响应。
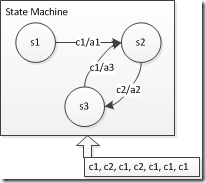
如上图所示,{s1, s2, s3}均为状态,箭头c1/a1表示在s1状态、输入为c1时,跳转到s2,并进行a1操作。
最下方为一组输入,状态机应做出如下反应:
| 当前状态 | 输入 | 下一个状态 | 动作 |
| s1 | c1 | s2 | a1 |
| s2 | c2 | s3 | a2 |
| s3 | c1 | s2 | a3 |
| s2 | c2 | s3 | a2 |
| s3 | c1 | s2 | a3 |
| s2 | c1 | s_trap | a_trap |
| s_trap | c1 | s_trap | a_trap |
当某个状态遇到不能识别的输入时,就默认进入陷阱状态,在陷阱状态中,不论遇到怎样的输入都不能跳出。
为了表达上面这个自动机,我们定义它们的状态和输入类型:
typedef int State;
typedef int Condition; #define STATES 3 + 1
#define STATE_1 0
#define STATE_2 1
#define STATE_3 2
#define STATE_TRAP 3 #define CONDITIONS 2
#define CONDITION_1 0
#define CONDITION_2 1
在嵌入式环境中,由于存储空间比较小,因此把它们全部定义成宏。此外,为了降低执行时间的不确定性,我们使用O(1)的跳转表来模拟状态的跳转。
首先定义跳转类型:
typedef void (*ActionType)(State state, Condition condition); typedef struct
{
State next;
ActionType action;
} Trasition, * pTrasition;
然后按照上图中的跳转关系,把三个跳转加一个陷阱跳转先定义出来:
// (s1, c1, s2, a1)
Trasition t1 = {
STATE_2,
action_1
}; // (s2, c2, s3, a2)
Trasition t2 = {
STATE_3,
action_2
}; // (s3, c1, s2, a3)
Trasition t3 = {
STATE_2,
action_3
}; // (s, c, trap, a1)
Trasition tt = {
STATE_TRAP,
action_trap
};
其中的动作,由用户自己完成,在这里仅定义一条输出语句。
void action_1(State state, Condition condition)
{
printf("Action 1 triggered.\n");
}
最后定义跳转表:
pTrasition transition_table[STATES][CONDITIONS] = {
/* c1, c2*/
/* s1 */&t1, &tt,
/* s2 */&tt, &t2,
/* s3 */&t3, &tt,
/* st */&tt, &tt,
};
即可表达上文中的跳转关系。
最后定义状态机,如果不考虑多任务请求,那么状态机仅需要存储当前状态便行了。例如:
typedef struct
{
State current;
} StateMachine, * pStateMachine; State step(pStateMachine machine, Condition condition)
{
pTrasition t = transition_table[machine->current][condition];
(*(t->action))(machine->current, condition);
machine->current = t->next;
return machine->current;
}
但是考虑到当一个跳转正在进行的时候,同时又有其他任务请求跳转,则会出现数据不一致的问题。
举个例子:task1(s1, c1/a1 –> s2)和task2(s2, c2/a2 –> s3)先后执行,是可以顺利到达s3状态的,但若操作a1运行的时候,执行权限被task2抢占,则task2此时看到的当前状态还是s1,s1遇到c2就进入陷阱状态,而不会到达s3了,也就是说,状态的跳转发生了不确定,这是不能容忍的。
因此要重新设计状态机,增加一个“事务中”条件和一个用于存储输入的条件队列。修改后的代码如下:
#define E_OK 0
#define E_NO_DATA 1
#define E_OVERFLOW 2 typedef struct
{
Condition queue[QMAX];
int head;
int tail;
bool overflow;
} ConditionQueue, * pConditionQueue; int push(ConditionQueue * queue, Condition c)
{
unsigned int flags;
Irq_Save(flags);
if ((queue->head == queue->tail + ) || ((queue->head == ) && (queue->tail == )))
{
queue->overflow = true;
Irq_Restore(flags);
return E_OVERFLOW;
}
else
{
queue->queue[queue->tail] = c;
queue->tail = (queue->tail + ) % QMAX;
Irq_Restore(flags);
}
return E_OK;
} int poll(ConditionQueue * queue, Condition * c)
{
unsigned int flags;
Irq_Save(flags);
if (queue->head == queue->tail)
{
Irq_Restore(flags);
return E_NO_DATA;
}
else
{
*c = queue->queue[queue->head];
queue->overflow = false;
queue->head = (queue->head + ) % QMAX;
Irq_Restore(flags);
}
return E_OK;
} typedef struct
{
State current;
bool inTransaction;
ConditionQueue queue;
} StateMachine, * pStateMachine; static State __step(pStateMachine machine, Condition condition)
{
State current = machine -> current;
pTrasition t = transition_table[current][condition];
(*(t->action))(current, condition);
current = t->next;
machine->current = current;
return current;
} State step(pStateMachine machine, Condition condition)
{
Condition next_condition;
int status;
State current;
if (machine->inTransaction)
{
push(&(machine->queue), condition);
return STATE_INTRANSACTION;
}
else
{
machine->inTransaction = true;
current = __step(machine, condition);
status = poll(&(machine->queue), &next_condition);
while(status == E_OK)
{
__step(machine, next_condition);
status = poll(&(machine->queue), &next_condition);
}
machine->inTransaction = false;
return current;
}
} void initialize(pStateMachine machine, State s)
{
machine->current = s;
machine->inTransaction = false;
machine->queue.head = ;
machine->queue.tail = ;
machine->queue.overflow = false;
}
[状态机]嵌入式设计模式:有限状态自动机的C语言实现的更多相关文章
- 嵌入式设计模式:有限状态自动机的C语言实现
转自:http://www.cnblogs.com/autosar/archive/2012/06/22/2558604.html 状态机模式是一种行为模式,在<设计模式>这本书中对其有详 ...
- 用C语言实现有限状态自动机FSM
摘要:状态机模式是一种行为模式,在<设计模式>这本书中对其有详细的描述,通过多态实现不同状态的调转行为的确是一种很好的方法,只可惜在嵌入式环境下,有时只能写纯C代码,并且还需要考虑代码的重 ...
- 简聊DFA(确定性有限状态自动机)
状态机理论最初的发展在数字电路设计领域.而在软件设计领域,状态机设计的理论俨然已经自成一体. 状态机是软件编程中的一个重要概念,比这个概念更重要的是对它的灵活应用.在一个思路清晰而且高效的程序中,必然 ...
- 非确定有限状态自动机的构建(一)——NFA的定义和实现
保留版权,转载需注明出处(http://blog.csdn.net/panjunbiao). 非确定有限状态自动机(Nondeterministic Finite Automata,NFA)由以下元素 ...
- DFA确定有限状态自动机
DFA 在计算理论中,确定有限状态自动机或确定有限自动机(英语:deterministic finite automaton, DFA)是一个能实现状态转移的自动机.对于一个给定的属于该自动机的状态和 ...
- K:有限状态自动机
有限状态自动机是一种特殊的状态机.它表示有限个状态以及在这些状态之间的转移和动作等行为的数学模型.有限状态自动机分为两种,一种是 确定有限状态自动机(DFA) ,一种是 非确定有限状态自动机(NF ...
- Trie 前缀树或字典树 确定有限状态自动机
https://zh.wikipedia.org/wiki/Trie 应用 trie树常用于搜索提示.如当输入一个网址,可以自动搜索出可能的选择.当没有完全匹配的搜索结果,可以返回前缀最相似的可能.[ ...
- 非确定有限状态自动机的构建(二)——将CharVal转换为NFA
保留版权,转载注明出处:潘军彪的个人博客(http://blog.csdn.net/panjunbiao/article/details/9378933) 将上下文无关文法读入内存之后,可以将它转换成 ...
- 【Codeforces 506E】Mr.Kitayuta’s Gift&&【BZOJ 4214】黄昏下的礼物 dp转有限状态自动机+矩阵乘法优化
神题……胡乱讲述一下思维过程……首先,读懂题.然后,转化问题为构造一个长度为|T|+n的字符串,使其内含有T这个子序列.之后,想到一个简单的dp.由于是回文串,我们就增量构造半个回文串,设f(i,j, ...
随机推荐
- 原生php如何获取当前页面的url
原生php如何获取当前页面的url? //php获取当前访问的完整url地址 function get_current_url(){ $current_url='http://'; if(isset( ...
- PHP中的安全函数
安全是编程非常重要的一个方面.在任何一种编程语言中,都提供了许多的函数或者模块来确保程序的安全性.在现代网站应用中,经常要获取来自世界各地用户的输入,但是,我们都知道“永远不能相信那些用户输入的数据” ...
- shell脚本死循环判断nginx日志reqest_time时间大于3秒是否增加,若增加发送相关日志信息到开发人员
#!/bin/bash while [ 1 ] do pre_request_time_count=`cat /var/log/nginx/access.log |awk '{print $NF}'| ...
- [CXF REST标准实战系列] 一、JAXB xml与javaBean的转换(转)
转自:[CXF REST标准实战系列] 一.JAXB xml与javaBean的转换 文章Points: 1.不认识到犯错,然后得到永久的教训. 2.认识JAXB 3.代码实战 1.不认识到犯错,然后 ...
- Nginx配置https和wss
微信小程序不仅要求必须是HTTPS和WSS,还要求URL里不能有端口号. 一.使用Nginx足够了 常见的服务器有三种: Nginx IIS Apache 这三种服务器都可以配置https,但是没必要 ...
- java.sql.SQLException: 索引中丢失 IN 或 OUT 参数:: 1
String sql1 = "insert into TEST_RELEVANCEEXPORT" + " (ID, YYCSDM, YYCSMC, ...
- 最短路径 - 迪杰斯特拉(Dijkstra)算法
对于网图来说,最短路径,是指两顶点之间经过的边上权值之和最少的路径,并且我们称路径上的第一个顶点为源点,最后一个顶点为终点.最短路径的算法主要有迪杰斯特拉(Dijkstra)算法和弗洛伊德(Floyd ...
- Calendar 中getActualMaximumd 功能
String str = (new SimpleDateFormat("yyyy-MM-dd HH:mm:ss:SSS")) .format(new Date()); Calend ...
- 把git上的larave项目通过SourceTree安装上再通过composer安装依赖库
1.项目地址克隆 https://gitee.com/fps2tao/laravel5.5-alitaobao.git 通过SourceTree工具下载到本地 2.在命令行方式打开项目地址安装依赖库( ...
- getXXXPos()约定
class CmyNode:public CCNode{ public: CmyNode(){ m_XXX=NULL; } virtual~CmyNode(){ } bool init(){ m_XX ...