PID控制器开发笔记之二:积分分离PID控制器的实现
前面的文章中,我们已经讲述了PID控制器的实现,包括位置型PID控制器和增量型PID控制器。但这个实现只是最基本的实现,并没有考虑任何的干扰情况。在本节及后续的一些章节,我们就来讨论一下经典PID控制器的优化与改进。这一节我们首先来讨论针对积分项的积分分离优化算法。
1、基本思想
我们已经讲述了PID控制引入积分主要是为了消除静差,提高控制精度。但在过程的启动、结束或大幅度增减设定值时,短时间内系统输出有很大偏差,会造成PID运算的积分累积,引起超调或者振荡。为了解决这一干扰,人们引入了积分分离的思想。其思路是偏差值较大时,取消积分作用,以免于超调量增大;而偏差值较小时,引入积分作用,以便消除静差,提高控制精度。
具体的实现步骤是:根据实际情况,设定一个阈值;当偏差大于阈值时,消除积分仅用PD控制;当偏差小于等于阈值时,引入积分采用PID控制。则控制算法可表示为:

其中β称为积分开关系数,其取值范围为:
由上述表述及公式我们可以知道,积分分离算法的效果其实与ε值的选取有莫大关系,所以ε值的选取实际上是实现的难点,ε值过大则达不到积分分离的效果,而ε值过小则难以进入积分区,ε值的选取存在很大的主观因素。
对于经典的增量式PID算法,似乎没有办法由以上的公式推导而来,因为β随着err(k)的变化在不是修改着控制器的表达式。其实我们可以换一种角度考虑,每次系统调节未定后,偏差应该为零,然后只有当设定值改变时,系统才会响应而开始调节。设定值的改变实际上是一个阶跃变化,此时的控制输出记为U0,开始调节时,其调节增量其实与之前的一切没有关系。所以我们就可以以变化时刻开始为起点,而得到带积分分离的增量算法,以保证在启动、停止和快速变化时防止超调。公式如下:

其中β的取值与位置型PID算法一致。可能有人会担心偏差来回变化,造成积分作用的频繁分离和引入,进而使上述的增量表达式无法实现。其实我们分析一下就能发现,在开始时,由于设定值变化引起的偏差大而分离了积分作用,在接近设定值时,偏差变小就引入了积分,一边消除静差,而后处于稳态,直到下一次变化。
2、算法实现
这一部分,我们根据前面对其基本思想的描述,来实现基于积分分离的PID算法实现,同样是包括位置型和增量型两种实现方式。首先我们来看一下算法的实现过程,具体的流程图如下:
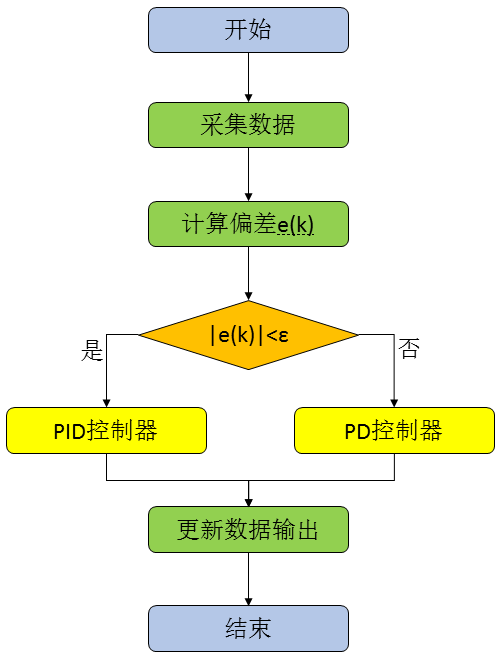
有上图我们知道,与普通的PID算法的区别,只是判断偏差的大小,偏差大时,为PD算法,偏差小时为PID算法。于是我们需要一个偏差检测与积分项分离系数β的函数。
static uint16_t BetaGeneration(float error,float epsilon)
{
uint16_t beta=;
if(abs(error)<= epsilon)
{
beta=;
}
return beta;
}
(1)位置型PID算法实现
根据前面的分析我们可以很轻松的编写程序,只需要在编写程序时判断偏差以确定是否引入积分项就可以了。同样先定义PID对象的结构体:
/*定义结构体和公用体*/
typedef struct
{
float setpoint; //设定值
float proportiongain; //比例系数
float integralgain; //积分系数
float derivativegain; //微分系数
float lasterror; //前一拍偏差
float result; //输出值
float integral;//积分值
float epsilon; //偏差检测阈值
}PID;
接下来实现PID控制器:
void PIDRegulation(PID *vPID, float processValue)
{
float thisError;
thisError=vPID->setpoint-processValue;
vPID->integral+=thisError;
uint16_t beta= BetaGeneration(error, vPID->epsilon);
if(beta>)
{
vPID->result=vPID->proportiongain*thisError+vPID->derivativegain*(thisError-vPID->lasterror);
}
else
{
vPID->result=vPID->proportiongain*thisError+vPID->integralgain*vPID->integral+vPID->derivativegain*(thisError-vPID->lasterror);
}
vPID->lasterror=thisError;
}
与普通的PID算法的区别就是上述代码中增加了偏差判断,来决定积分项的分离与否。
(2)增量型PID算法实现
对于增量型PID控制,我们也可以采取相同的处理。首先定义PID对象的结构体:
/*定义结构体和公用体*/
typedef struct
{
float setpoint; //设定值
float proportiongain; //比例系数
float integralgain; //积分系数
float derivativegain; //微分系数
float lasterror; //前一拍偏差
float preerror; //前两拍偏差
float deadband; //死区
float result; //输出值
float epsilon; //偏差检测阈值
}PID;
接下来实现PID控制器:
void PIDRegulation(PID *vPID, float processValue)
{
float thisError;
float increment;
float pError,dError,iError;
thisError=vPID->setpoint-processValue; //得到偏差值
pError=thisError-vPID->lasterror;
iError=thisError;
dError=thisError-*(vPID->lasterror)+vPID->preerror;
uint16_t beta= BetaGeneration(error, vPID->epsilon);
if(beta>)
{
increment=vPID->proportiongain*pError+vPID->derivativegain*dError; //增量计算
}
else
{
increment=vPID->proportiongain*pError+vPID->integralgain*iError+vPID->derivativegain*dError; //增量计算
}
vPID->preerror=vPID->lasterror; //存放偏差用于下次运算
vPID->lasterror=thisError;
vPID->result+=increment;
}
这就实现了增量型PID控制器积分分离算法,也没有考虑任何的干扰条件,仅仅只是对数学公式的计算机语言化。
3、总结
积分分离算法的思想非常简单。当然,对于β的取值,很多人提出了改进措施,例如分多段取值,设定多个阈值ε1、ε2、ε3、ε4等,不过这些阈值也需要根据实际的系统来设定。除了分段取值外,甚至也有采用函数关系来获取β值。当然,这样处理后就不再是简单的积分分离了,特别是在增量型算法中,实际上已经演变为一种变积分算法了。已经偏离了积分分离算法的设计思想,在后面我们会进一步说明。
欢迎关注:

PID控制器开发笔记之二:积分分离PID控制器的实现的更多相关文章
- PID控制器开发笔记之十一:专家PID控制器的实现
前面我们讨论了经典的数字PID控制算法及其常见的改进与补偿算法,基本已经覆盖了无模型和简单模型PID控制经典算法的大部.再接下来的我们将讨论智能PID控制,智能PID控制不同于常规意义下的智能控制,是 ...
- PID控制器开发笔记之七:微分先行PID控制器的实现
前面已经实现了各种的PID算法,然而在某些给定值频繁且大幅变化的场合,微分项常常会引起系统的振荡.为了适应这种给定值频繁变化的场合,人们设计了微分先行算法. 1.微分先行算法的思想 微分先行PID控制 ...
- PID控制器开发笔记(转)
源: PID控制器开发笔记
- PID控制器开发笔记之五:变积分PID控制器的实现
在普通的PID控制算法中,由于积分系数Ki是常数,所以在整个控制过程中,积分增量是不变的.然而,系统对于积分项的要求是,系统偏差大时,积分作用应该减弱甚至是全无,而在偏差小时,则应该加强.积分系数取大 ...
- PID控制器开发笔记之三:抗积分饱和PID控制器的实现
积分作用的引入是为了消除系统的静差,提高控制精度.但是如果一个系统总是存在统一个方向的偏差,就可能无限累加而进而饱和,极大影响系统性能.抗积分饱和就是用以解决这一问题的方法之一.这一节我们就来实现抗积 ...
- PID控制器开发笔记之十三:单神经元PID控制器的实现
神经网络是模拟人脑思维方式的数学模型.神经网络是智能控制的一个重要分支,人们针对控制过程提供了各种实现方式,在本节我们主要讨论一下采用单神经元实现PID控制器的方式. 1.单神经元的基本原理 单神经元 ...
- PID控制器开发笔记之八:带死区的PID控制器的实现
在计算机控制系统中,由于系统特性和计算精度等问题,致使系统偏差总是存在,系统总是频繁动作不能稳定.为了解决这种情况,我们可以引入带死区的PID算法. 1.带死区PID的基本思想 带死区的PID控制算法 ...
- PID控制器开发笔记之一:PID算法原理及基本实现
在自动控制中,PID及其衍生出来的算法是应用最广的算法之一.各个做自动控制的厂家基本都有会实现这一经典算法.我们在做项目的过程中,也时常会遇到类似的需求,所以就想实现这一算法以适用于更多的应用场景. ...
- stm32开发笔记(二):stm32系列使用V3.5固件库的帮助文件以及GPIO基本功能(一)
前言 stm32系列是最常用的单片机之一,不同的版本对应除了引脚.外设.频率.容量等'不同之外,其开发的方法是一样的. 本章讲解使用库函数使用GPIO引脚功能. 补充 本文章为多年前学习 ...
随机推荐
- 关于PHP的加载类操作以及其他两种魔术方法应用
<?php 加载类//include("./Ren.class.php");//include "./Ren.class.php";include_onc ...
- [C++]Linux之网络实时检测功能
声明:如需引用或者摘抄本博文源码或者其文章的,请在显著处注明,来源于本博文/作者,以示尊重劳动成果,助力开源精神.也欢迎大家一起探讨,交流,以共同进步,乃至成为朋友- 0.0 由于学习操作系统实验课程 ...
- luogu P2520 [HAOI2011]向量
传送门 一堆人说数论只会gcd,我连gcd都不会,菜死算了qwq Orzyyb 这题欺负我数学不好qwq 首先可以发现实际上有如下操作:x或y±2a,x或y±2b,x+a y+b,x+b y+a(后面 ...
- Spark思维导图之内存管理
- 【tmos】shell工具推荐
xshell(推荐) putty
- 批量清除react中的计时器小组件
在Timers的父组件被卸载时,批量清除各个计时器.
- php编程 之 php进阶练习
1,php的date相关操作: PHP date() 函数可把时间戳格式化为可读性更好的日期和时间. <?php echo date("Y/m/d") . "< ...
- shell编程 之 传递参数到脚本里
1 传递参数的基本格式 在脚本的需要参数的地方写$1,$2,$3...$n,运行的时候带参数运行就相当于是专递参数进shell脚本里了,比如: ./t1.sh 1 2 #!/bin/bash echo ...
- 匿名内部类可以访问的变量---静态成员变量和final修饰的局部变量
在学习多线程的时候用到了匿名内部类,匿名内部类可以访问static静态成员变量或者final修饰的局部变量. 匿名内部类在编译之后会生成class文件,比如Test内的第一个匿名内部类编译之后就是Te ...
- 【leetcode】557. Reverse Words in a String III
Algorithm [leetcode]557. Reverse Words in a String III https://leetcode.com/problems/reverse-words-i ...