『OpenCV3』Harris角点特征_API调用及python手动实现
一、OpenCV接口调用示意
介绍了OpenCV3中提取图像角点特征的函数:
# coding=utf-
import cv2
import numpy as np '''Harris算法角点特征提取''' img = cv2.imread('chess_board.png')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
gray = np.float32(gray) # {标记点大小,敏感度(~,越小越敏感)}
# OpenCV函数cv2.cornerHarris() 有四个参数 其作用分别为 :
#img - Input image, it should be grayscale and float32 type.
#blockSize - It is the size of neighbourhood considered for corner detection
#ksize - Aperture parameter of Sobel derivative used.
#k - Harris detector free parameter in the equation,在0. 到0.05之间
dst = cv2.cornerHarris(gray,,,0.04)
img[dst>0.01 * dst.max()] = [,,] cv2.imshow('corners',img)
cv2.waitKey()
cv2.destroyAllWindows()
dst = cv2.cornerHarris(gray,2,23,0.04)中第3个参数(23)调整对结果影响如下:
取值为3时:

取值为23时:

二、使用Python实现harris胶垫检测
计算机视觉课后作业,因为已经提交了一段时间了,之前也注意到网上很少有python版本的harris角点检测代码,所以开源出来,
# Author : hellcat
# Time : 18-3-22 """
import os
os.environ["CUDA_VISIBLE_DEVICES"]="-1" import numpy as np
np.set_printoptions(threshold=np.inf) import tensorflow as tf
config = tf.ConfigProto()
config.gpu_options.allow_growth = True
sess = tf.Session(config=config)
""" import numpy as np
from PIL import Image
from skimage import filters
from datetime import datetime
import matplotlib.pyplot as plt IMAGE_PATH = '1653033843.jpg' # 图片路径
WITH_NMS = False # 是否非极大值抑制,True/False
k = 0.04 # 响应函数参数k
threshold = 0.01 # 界定阈值 img = Image.open(IMAGE_PATH)
img_gray = img.convert('L')
img_num = np.pad(np.asarray(img_gray, dtype=np.float32), ((1, 1), (1, 1)), 'constant')
h, w = img_num.shape # padding之后的图像尺寸 # 计算Ix,Iy
grad = np.empty([h, w, 2], dtype=np.float)
grad[:, 1:-1, 0] = img_num[:, 2:] - img_num[:, :-2] # Ix
grad[1:-1, :, 1] = img_num[2:, :] - img_num[:-2, :] # Iy # 计算Ixx,Iyy,Ixy
m = np.empty([h, w, 3], dtype=np.float)
# m[:, :, 0] = grad[:, :, 0]**2
# m[:, :, 1] = grad[:, :, 0]**2
# m[:, :, 2] = grad[:, :, 0]*grad[:, :, 1]
m[:, :, 0] = filters.gaussian(grad[:, :, 0]**2, sigma=2) # Ixx
m[:, :, 1] = filters.gaussian(grad[:, :, 1]**2, sigma=2) # Iyy
m[:, :, 2] = filters.gaussian(grad[:, :, 0]*grad[:, :, 1], sigma=2) # Ixy
m = [np.array([[m[i, j, 0], m[i, j, 2]],
[m[i, j, 2], m[i, j, 1]]]) for i in range(h) for j in range(w)] # 记录一下R计算时耗
start = datetime.now()
# 0:00:42.123384 迭代器策略:用时间换空间
# R = np.array([d-k*t**2 for d, t in zip(map(np.linalg.det, m), map(np.trace, m))])
# 0:00:35.846864
D, T = list(map(np.linalg.det, m)), list(map(np.trace, m))
R = np.array([d-k*t**2 for d, t in zip(D, T)])
end = datetime.now()
print(end-start) R_max = np.max(R)
R = R.reshape(h, w) # 标注角点
record = np.zeros_like(R, dtype=np.int)
img_row = np.pad(np.asarray(img, dtype=np.float32), ((1, 1), (1, 1), (0, 0)), 'constant')
for i in range(1, h-2):
for j in range(1, w-2):
if WITH_NMS:
if R[i, j] > R_max*threshold and R[i, j] == np.max(R[i-1:i+2, j-1:j+2]):
record[i, j] = 255
img_row[i, j] = [255, 255, 255]
else:
if R[i, j] > R_max*0.01:
record[i, j] = 255
img_row[i, j] = [255, 255, 255]
# record[R > 0.01*R_max] = 255
# img_row[R > 0.01*R_max] = [255, 255, 255] # 图像展示与保存
res = Image.fromarray(np.uint8(record[1:-1, 1:-1]))
img_row = Image.fromarray(np.uint8(img_row[1:-1, 1:-1])) plt.figure()
plt.subplot(1, 2, 1)
plt.imshow(res)
plt.subplot(1, 2, 2)
plt.imshow(img_row)
if WITH_NMS:
plt.savefig('角点检测_NMS.jpg')
res.save('角点检测_NMS_1.png')
img_row.save('角点检测_NMS_2.png')
else:
plt.savefig('角点检测_no_NMS.jpg')
res.save('角点检测_no_NMS_1.png')
img_row.save('角点检测_no_NMS_2.png')
实际上在计算Ixx,Ixy,Iyy时要进行高斯滤波,理论推导中都采用了最简单的权重(全部为1),这点注意,使用全1权重啥也检测不出来。
不进行非极大值抑制结果:
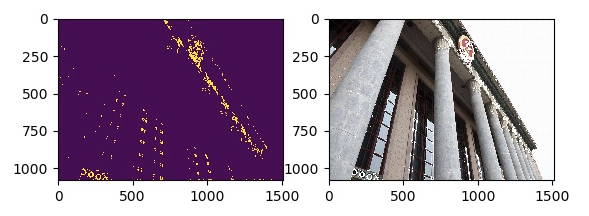
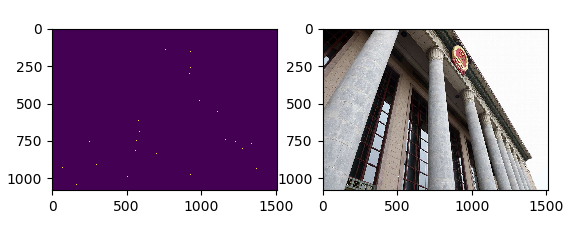
进行非极大值抑制结果(实际上检测出来的点很多,因为分辨率看不清):
『OpenCV3』Harris角点特征_API调用及python手动实现的更多相关文章
- 『OpenCV3』霍夫变换原理及实现
霍夫变换常用于检测直线特征,经扩展后的霍夫变换也可以检测其他简单的图像结构. 在霍夫变换中我们常用公式 ρ = x*cosθ + y*sinθ 表示直线,其中ρ是圆的半径(也可以理解为原点到直线的距离 ...
- 『OpenCV3』滤波器边缘检测
一.原理简介 边缘检测原理 - Sobel, Laplace, Canny算子 X方向Sobel算子 -1 -2 -1 0 0 0 1 2 1 Y方向Sobel算子 -1 0 1 -2 0 2 -1 ...
- 『OpenCV3』滤波器实现及使用滤波器降噪
一.滤波器实现 我们实现这样一个基于拉普拉斯算子的滤波器核心,并使用它进行滤波,这可以做到锐化图像的效果, 0 -1 0 -1 5 -1 0 -1 0 首先我们完全手动的进行滤波,依赖指针操作, vo ...
- 『OpenCV3』基于色彩分割图片
一.遍历图像实现色彩掩码 本节我们实现这样一个算法,我们指定某种颜色和一个阈值,根据输入图片生成一张掩码,标记符合的像素(和指定颜色的差异在阈值容忍内). 源代码如下,我们使用一个class完成这个目 ...
- 『OpenCV3』Mat简介
Mat属性方法介绍:OpenCV2:Mat属性type,depth,step 推荐一套OpenCV入门博客:OpenCV探索 一.Mat Mat类用于表示一个多维的单通道或者多通道的稠密数组.能够用来 ...
- 『OpenCV3』处理视频&摄像头
在opencv中,摄像头和视频文件并没有很大不同,都是一个可以read的数据源,使用cv2.VideoCapture(path).read()可以获取(flag,当前帧),对于每一帧,使用图片处理函数 ...
- 『OpenCV3』简单图片处理
cv2和numpy深度契合,其图片读入后就是numpy.array,只不过dtype比较不常用而已,支持全部数组方法 数组既图片 import numpy as np import cv2 img = ...
- 『片段』ShellHelper 控制台程序 的 程序调用(支持输入命令得到返回字符串输出)
背景: > 之前做 OGG 时,被 OGG的配置 恶心到了.(OGG是啥,这里就不解释了) > 总之就是一个 控制台程序,总是得手动执行一堆命令,每次都得输入 —— 实在是打字打累了. & ...
- 第十一节、Harris角点检测原理(附源码)
OpenCV可以检测图像的主要特征,然后提取这些特征.使其成为图像描述符,这类似于人的眼睛和大脑.这些图像特征可作为图像搜索的数据库.此外,人们可以利用这些关键点将图像拼接起来,组成一个更大的图像,比 ...
随机推荐
- MYSQL的存储过程和函数简单写法
存储过程 MySQL中,创建存储过程的基本形式如下: CREATE PROCEDURE sp_name ([proc_parameter[,...]]) [characteristic ...] ro ...
- 20145316许心远《网络对抗》第一次实验拓展:shellcode注入+return-to-libc
shellcode注入实践 编写shellcode 这一部分在我上一篇日志里面已经详细讲过了,这里直接把验证合适的shellcode拿过来. \x31\xc0\x50\x68\x2f\x2f\x73\ ...
- mysql修改Truncated incorrect DOUBLE value:
UPDATE shop_category SET name = 'Secolul XVI - XVIII' AND name_eng = '16th to 18th centuries' WHERE ...
- [转载]C#异步调用四大方法详解
C#异步调用四大方法是什么呢?C#异步调用四大方法的使用是如何进行的呢?让我们首先了解下什么时候用到C#异步调用: .NET Framework 允许您C#异步调用任何方法.定义与您需要调用的方法具有 ...
- Java lambda 表达式
其实是试验一下markdown... 原: 只有一个抽象方法的接口称为函数式接口(functional interface). 当需要实现了这种接口的类的对象的时候,就可以提供一个lambda表达式. ...
- STL与泛型编程(第一周)
part 1 C++模版简介 一,模版概观 1.模板 (Templates)是C++的一种特性,允许函数或类(对象)通过泛型(generic types)的形式表现或运行. 模板可以使得函数或类在对应 ...
- switch to hexo !
用 hexo 搭了个博客 但是由于本博客内容过多,所以对于少数内容搬迁,而且本博客和那个博客相关联,但是这个博客不再更新. 新站地址 再见!
- noip2007部分题
1.统计数字 题目描述 Description 某次科研调查时得到了n个自然数,每个数均不超过1500000000(1.5*109).已知不相同的数不超过10000 个,现在需要统计这些自然数各自出现 ...
- myeclipse中文名字项目运行报错
今天由于项目进行分支,负责开发迭代的功能对应不同的分支项目,没想到的是分支项目名称加上了功能的中文名字.要使用了resin发布项目的时候,报了 java.io.CharConversionExcept ...
- startActivityForResult( )用法
一.与startActivity( )的不同之处 1, startActivity( ) 仅仅是跳转到目标页面,若是想跳回当前页面,则必须再使用一次startActivity( ). 2, start ...