[论文理解] Receptive Field Block Net for Accurate and Fast Object Detection
Receptive Field Block Net for Accurate and Fast Object Detection
简介
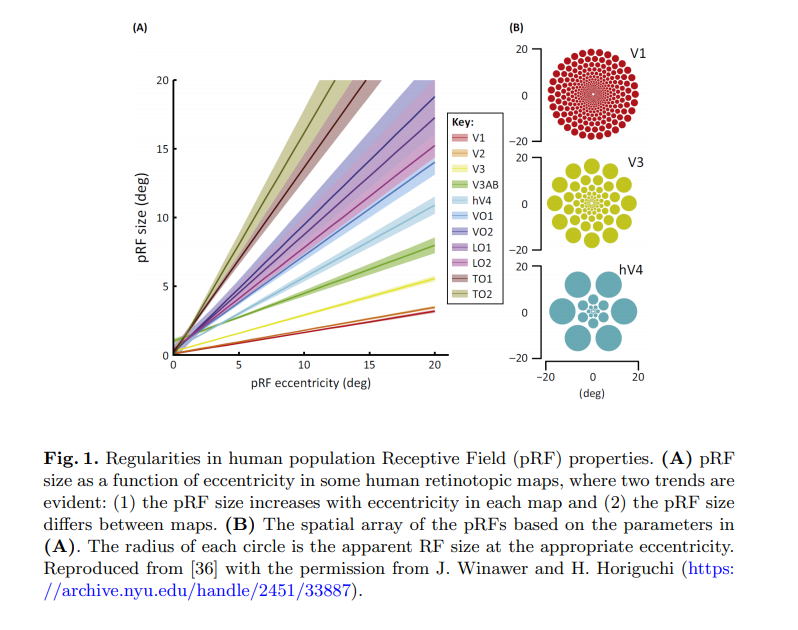
本文在SSD基础上提出了RFB Module,利用神经科学的先验知识来解释这种效果提升。本质上是设计一种新的结构来提升感受野,并表明了人类视网膜的感受野有一个特点,离视线中心越远,其感受野是越大的,越靠近视线中间,感受野越小。基于此,本文提出的RFB Module就是来模拟人类这种视觉特点的。
RFB Module
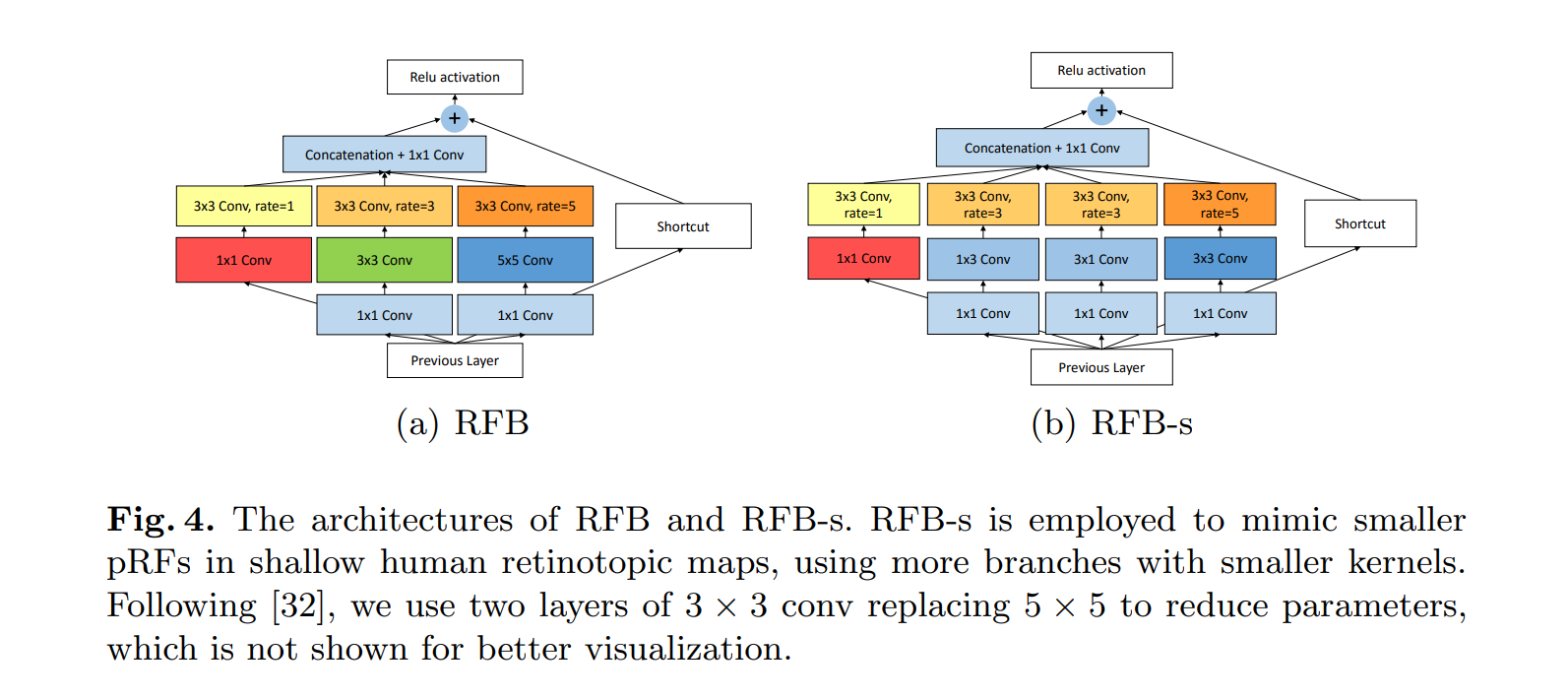
结构如下图所示。
为什么要用空洞卷积呢?
首先要提高感受野,直观的想法就是要么加深层数,要么使用更大的卷积核,要么就是卷积之前使用pooling。加深层数网络参数就会变多,没法完成轻量级的任务;更大的卷积核一样参数也会变多;pooling虽然不会增加参数,但是会使信息损失,不利于后面层的信息传递。所以作者这里很自然的想到用空洞卷积,既不增加参数量,又能够提高感受野。
为什么要用这种多分支结构呢?
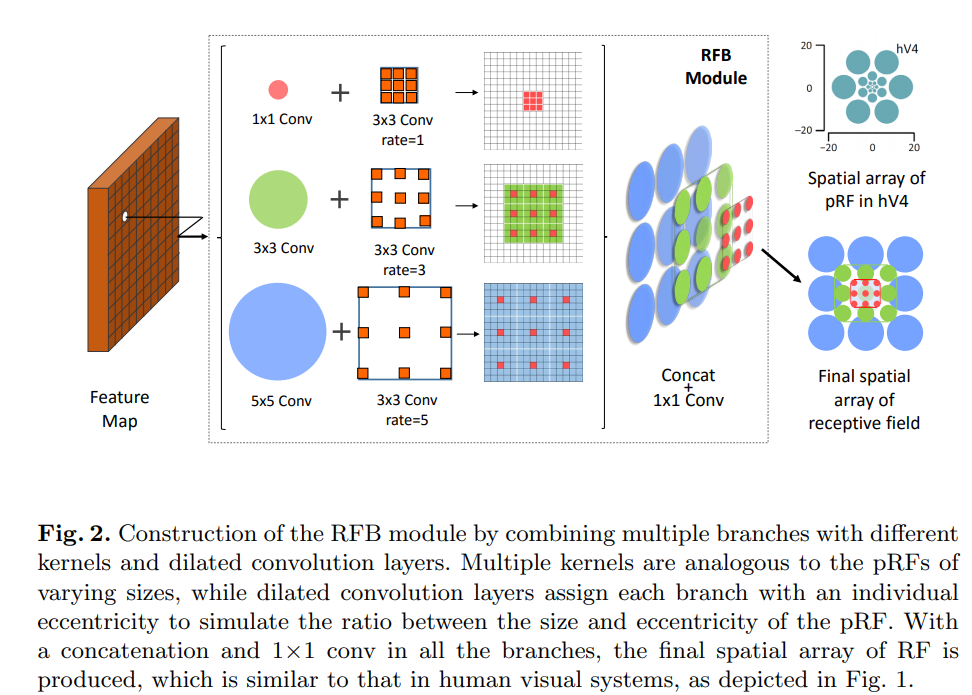
这是为了捕捉不同感受野的信息,如前面提到的,人类视野的特点就是距视野中心距离不同感受野不同,所以使用多分支结构,每个分支捕捉一种感受野,最后通过concat来融合感受野信息,就能达到模拟人类视觉的效果了。作者这里也给了一张图来说明。
为什么要提出两种版本的RFB呢?
左边的结构是原始的RFB,右边的结构相比RFB把3×3的conv变成了两个1×3和3×1的分支,一是减少了参数量,二是增加了更小的感受野,这样也是在模拟人类视觉系统,捕捉更小的感受野。
网络结构
整体网络结构如下所示,很好理解。
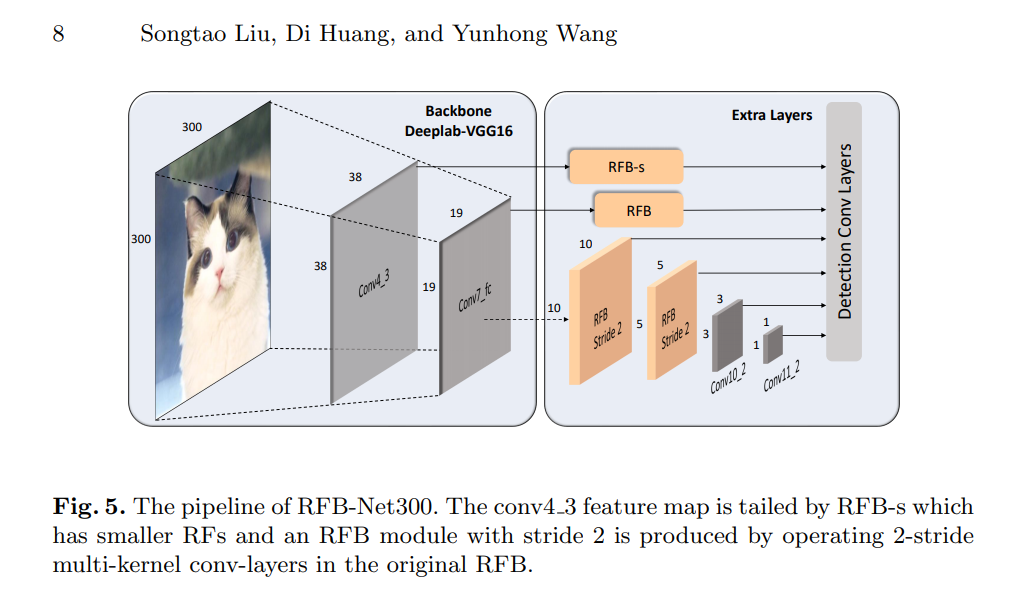
前面就是vgg19,然后从中间的层分出6个预测分支,比较好理解没啥记的。
代码复现
import torch
import torch.nn as nn
import torch.nn.functional as F
from torchsummary import summary
class RFBModule(nn.Module):
def __init__(self,out,stride = 1):
super(RFBModule,self).__init__()
self.s1 = nn.Sequential(
nn.Conv2d(out,out,kernel_size = 1),
nn.Conv2d(out,out,kernel_size=3,dilation = 1,padding = 1,stride = stride)
)
self.s2 = nn.Sequential(
nn.Conv2d(out,out,kernel_size =1),
nn.Conv2d(out,out,kernel_size=3,padding = 1),
nn.Conv2d(out,out,kernel_size=3,dilation = 3,padding = 3,stride = stride)
)
self.s3 = nn.Sequential(
nn.Conv2d(out,out,kernel_size =1),
nn.Conv2d(out,out,kernel_size = 5,padding =2),
nn.Conv2d(out,out,kernel_size=3,dilation=5,padding = 5,stride = stride)
)
self.shortcut = nn.Conv2d(out,out,kernel_size = 1,stride = stride)
self.conv1x1 = nn.Conv2d(out*3,out,kernel_size =1)
def forward(self,x):
s1 = self.s1(x)
s2 = self.s2(x)
s3 = self.s3(x)
#print(s1.size(),s2.size(),s3.size())
mix = torch.cat([s1,s2,s3],dim = 1)
mix = self.conv1x1(mix)
shortcut = self.shortcut(x)
return mix + shortcut
class RFBsModule(nn.Module):
def __init__(self,out,stride = 1):
super(RFBsModule,self).__init__()
self.s1 = nn.Sequential(
nn.Conv2d(out,out,kernel_size = 1),
nn.Conv2d(out,out,kernel_size=3,dilation = 1,padding = 1,stride = stride)
)
self.s2 = nn.Sequential(
nn.Conv2d(out,out,kernel_size =1),
nn.Conv2d(out,out,kernel_size=(1,3),padding = (0,1)),
nn.Conv2d(out,out,kernel_size=3,dilation = 3,padding = 3,stride = stride)
)
self.s3 = nn.Sequential(
nn.Conv2d(out,out,kernel_size =1),
nn.Conv2d(out,out,kernel_size = (3,1),padding =(1,0)),
nn.Conv2d(out,out,kernel_size=3,dilation=3,padding = 3,stride = stride)
)
self.s4 = nn.Sequential(
nn.Conv2d(out,out,kernel_size =1),
nn.Conv2d(out,out,kernel_size=3),
nn.Conv2d(out,out,kernel_size = 3,dilation = 5,stride = stride,padding = 6)
)
self.shortcut = nn.Conv2d(out,out,kernel_size = 1,stride = stride)
self.conv1x1 = nn.Conv2d(out*4,out,kernel_size =1)
def forward(self,x):
s1 = self.s1(x)
s2 = self.s2(x)
s3 = self.s3(x)
s4 = self.s4(x)
#print(s1.size(),s2.size(),s3.size(),s4.size())
#print(s1.size(),s2.size(),s3.size())
mix = torch.cat([s1,s2,s3,s4],dim = 1)
mix = self.conv1x1(mix)
shortcut = self.shortcut(x)
return mix + shortcut
class RFBNet(nn.Module):
def __init__(self):
super(RFBNet,self).__init__()
self.feature_1 = nn.Sequential(
nn.Conv2d(3,64,kernel_size = 3,padding = 1),
nn.ReLU(),
nn.Conv2d(64,64,kernel_size=3,padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size = 2,stride = 2),
nn.Conv2d(64,128,kernel_size = 3,padding = 1),
nn.ReLU(),
nn.Conv2d(128,128,kernel_size=3,padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size = 2,stride = 2),
nn.Conv2d(128,256,kernel_size = 3,padding = 1),
nn.ReLU(),
nn.Conv2d(256,256,kernel_size=3,padding=1),
nn.ReLU(),
nn.Conv2d(256,256,kernel_size=3,padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size = 2,stride = 2),
nn.Conv2d(256,512,kernel_size = 3,padding = 1),
nn.ReLU(),
nn.Conv2d(512,512,kernel_size=3,padding=1),
nn.ReLU(),
nn.Conv2d(512,512,kernel_size=3,padding=1),
nn.ReLU(),
)
self.feature_2 = nn.Sequential(
nn.MaxPool2d(kernel_size = 2,stride = 2),
nn.Conv2d(512,512,kernel_size = 3,padding = 1),
nn.ReLU(),
nn.Conv2d(512,512,kernel_size=3,padding=1),
nn.ReLU(),
nn.Conv2d(512,512,kernel_size=3,padding=1),
nn.ReLU(),
)
self.pre = nn.Conv2d(512,64,kernel_size = 1)
self.fc = nn.Conv2d(512,64,kernel_size = 1)
self.det1 = RFBsModule(out = 64,stride = 1)
self.det2 = RFBModule(out = 64,stride = 1)
self.det3 = RFBModule(out = 64,stride = 2)
self.det4 = RFBModule(out = 64,stride = 2)
self.det5 = nn.Conv2d(64,64,kernel_size = 3)
self.det6 = nn.Conv2d(64,64,kernel_size=3)
def forward(self,x):
x = self.feature_1(x)
det1 = self.det1(self.fc(x))
x = self.feature_2(x)
x = self.pre(x)
det2 = self.det2(x)
det3 = self.det3(det2)
det4 = self.det4(det3)
det5 = self.det5(det4)
det6 = self.det6(det5)
det1 = det1.permute(0,2,3,1).contiguous().view(x.size(0),-1,64)
det2 = det2.permute(0,2,3,1).contiguous().view(x.size(0),-1,64)
det3 = det3.permute(0,2,3,1).contiguous().view(x.size(0),-1,64)
det4 = det4.permute(0,2,3,1).contiguous().view(x.size(0),-1,64)
det5 = det5.permute(0,2,3,1).contiguous().view(x.size(0),-1,64)
det6 = det6.permute(0,2,3,1).contiguous().view(x.size(0),-1,64)
return torch.cat([det1,det2,det3,det4,det5,det6],dim = 1)
if __name__ == "__main__":
net = RFBNet()
x = torch.randn(2,3,300,300)
summary(net,(3,300,300),device = "cpu")
print(net(x).size())
论文原文:https://arxiv.org/pdf/1711.07767.pdf
[论文理解] Receptive Field Block Net for Accurate and Fast Object Detection的更多相关文章
- Paper Reading:Receptive Field Block Net for Accurate and Fast Object Detection
论文:Receptive Field Block Net for Accurate and Fast Object Detection 发表时间:2018 发表作者:(Beihang Universi ...
- Receptive Field Block Net for Accurate and Fast Object Detection
Receptive Field Block Net for Accurate and Fast Object Detection 作者:Songtao Liu, Di Huang*, and Yunh ...
- 论文阅读笔记五十一:CenterNet: Keypoint Triplets for Object Detection(CVPR2019)
论文链接:https://arxiv.org/abs/1904.08189 github:https://github.com/Duankaiwen/CenterNet 摘要 目标检测中,基于关键点的 ...
- [论文理解] Acquisition of Localization Confidence for Accurate Object Detection
Acquisition of Localization Confidence for Accurate Object Detection Intro 目标检测领域的问题有很多,本文的作者捕捉到了这样一 ...
- 论文阅读笔记三十三:Feature Pyramid Networks for Object Detection(FPN CVPR 2017)
论文源址:https://arxiv.org/abs/1612.03144 代码:https://github.com/jwyang/fpn.pytorch 摘要 特征金字塔是用于不同尺寸目标检测中的 ...
- [论文理解] CBAM: Convolutional Block Attention Module
CBAM: Convolutional Block Attention Module 简介 本文利用attention机制,使得针对网络有了更好的特征表示,这种结构通过支路学习到通道间关系的权重和像素 ...
- 【计算机视觉】【神经网络与深度学习】论文阅读笔记:You Only Look Once: Unified, Real-Time Object Detection
尊重原创,转载请注明:http://blog.csdn.net/tangwei2014 这是继RCNN,fast-RCNN 和 faster-RCNN之后,rbg(Ross Girshick)大神挂名 ...
- 论文阅读笔记二十七:Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks(CVPR 2016)
论文源址:https://arxiv.org/abs/1506.01497 tensorflow代码:https://github.com/endernewton/tf-faster-rcnn 室友对 ...
- 机器视觉:Convolutional Neural Networks, Receptive Field and Feature Maps
CNN 大概是目前 CV 界最火爆的一款模型了,堪比当年的 SVM.从 2012 年到现在,CNN 已经广泛应用于CV的各个领域,从最初的 classification,到现在的semantic se ...
随机推荐
- Stream 分布式数据流的轻量级异步快照
1. 概述 分布式有状态流处理支持在云中部署和执行大规模连续计算,主要针对低延迟和高吞吐量.这种模式的一个最根本的挑战就是在可能的失败情况下提供处理保证.现有方法依赖于可用于故障恢复的周期性全局状态快 ...
- linux之信息查看
在使用Linux操作系统的时候,有时候会需要了解当前使用的系统版本信息,特别是在给别人进行服务器部署运维的时候,准确的系统版本信息至关重要 查看linux内核版本信息: cat /proc/vers ...
- upupw : Apache Php5.5 的使用
1. 官网下载 1. 官网下载 apache php5.5点击下载 但是 现在有时候打不开,所以提供以下方法 2. 百度云网盘下载 https://pan.baidu.com/s/1eQ2k1Su ...
- BeanUtils组件的使用
BeanUtils能够使我们更方便的进行javabean的赋值操作,它的底层是反射的原理 主要方法有 copyProperties(Object object,String name,String v ...
- 免费数学神器Mathpix发布移动版了,一起来写更快的公式
目录 1. 按 2. 下载地址 3. 介绍和使用 3.1. 介绍 3.2. 实际使用体验 1. 按 本文介绍的Mathpix可用于将手写的公式通过拍照或截图转成LaTeX 表达式. 写博客.记笔记最麻 ...
- linux发行版及版本号
1991年8月:Linus Torvalds宣布成立Linux 遵行GPL: Kernel:底层监控程序又叫通用程序,即我们所说的操作系统 Kernel的作用: ...
- springboot集成dubbo服务报错No provider available for the service
检查了下发现是因为没有正确编写暴露服务的注解,需要注意下: @Service(interfaceClass = StudentService.) @Component public class Stu ...
- ArcMap常用操作
1.矢量数据融合 数据管理->制图综合->融合 Data Management Tools -> Generalization -> Dissolve
- Kattis - heapsoffun Heaps of Fun (概率密度函数+dp)
题意:有一棵含有n个结点(n<=300)的根树,树上每个结点上的权值是从[0,ai](ai<=1e9)区间内随机的一个实数,问这棵树能形成一个最小堆的概率. 由于结点取值范围是1e9而且是 ...
- Linux下Discuz!7.2 LAMP环境搭建
linux下Discuz LAMP环境搭建 1.需要的源代码 httpd-2.2.15.tar.gz mysql-5.1.44.tar.gz php-5.3.2.tar.gz ...