Unity做360度的全景照片
这里推荐两种方法,第一种是用鼠标滑动,第二种是用手机的陀螺仪进行全景查看
第一种:
1、新建一Sphere,然后为其赋予材质,注意材质的Shader类型为:Mobile/particles/Alpha Blended,然后将做好的全景图贴上去
2、在摄像机上附加以下脚本:代码来源参考自
using UnityEngine;
using System.Collections;
using UnityEngine.UI; public class GyroController_01 : MonoBehaviour
{
public float moveSpeed = ;//物体旋转速度
public GameObject target; private Vector2 oldPosition;
private Vector2 oldPosition1;
private Vector2 oldPosition2; private float distance = ;
private bool flag = false;
//摄像头的位置
private float x = 0f;
private float y = 0f;
//左右滑动移动速度
public float xSpeed = 250f;
public float ySpeed = 120f;
//缩放限制系数
public float yMinLimit = -;
public float yMaxLimit = ;
//是否旋转
private bool isRotate = true;
//计数器
private float count = ; //初始化游戏信息设置
void Start()
{
Vector3 angles = transform.eulerAngles;
x = angles.y;
y = angles.x;
if (GetComponent<Rigidbody>())
GetComponent<Rigidbody>().freezeRotation = true;
} // Update is called once per frame
void Update()
{ if (isRotate)
{ target.transform.Rotate(Vector3.down, Time.deltaTime * moveSpeed, Space.World); }
if (!isRotate)
{
count += Time.deltaTime;
if (count > )
{
count = ;
isRotate = true;
}
} //触摸类型为移动触摸
if (Input.GetMouseButton())
{
//根据触摸点计算X与Y位置
x += Input.GetAxis("Mouse X") * xSpeed * Time.deltaTime;
y -= Input.GetAxis("Mouse Y") * ySpeed * Time.deltaTime;
isRotate = false;
}
//判断鼠标滑轮是否输入
float temp = Input.GetAxis("Mouse ScrollWheel");
if (temp != )
{
if (temp > )
{
// 这里的数据是根据我项目中的模型而调节的,大家可以自己任意修改
if (distance > -)
{
distance -= 0.5f;
}
}
if (temp < )
{
// 这里的数据是根据我项目中的模型而调节的,大家可以自己任意修改
if (distance < )
{
distance += 0.5f;
}
}
} } //计算距离,判断放大还是缩小。放大返回true,缩小返回false
bool IsEnlarge(Vector2 oP1, Vector2 oP2, Vector2 nP1, Vector2 nP2)
{
//old distance
float oldDistance = Mathf.Sqrt((oP1.x - oP2.x) * (oP1.x - oP2.x) + (oP1.y - oP2.y) * (oP1.y - oP2.y));
//new distance
float newDistance = Mathf.Sqrt((nP1.x - nP2.x) * (nP1.x - nP2.x) + (nP1.y - nP2.y) * (nP1.y - nP2.y)); if (oldDistance < newDistance)
{
//zoom+
return true;
}
else
{
//zoom-
return false;
}
} //每帧执行,在Update后
void LateUpdate()
{
if (target)
{
//重置摄像机的位置
y = ClampAngle(y, yMinLimit, yMaxLimit);
var rotation = Quaternion.Euler(y, x, );
var position = rotation * (new Vector3(0.0f, 0.0f, -distance)) + target.transform.position; transform.rotation = rotation;
transform.position = position;
}
}
float ClampAngle(float angle, float min, float max)
{
if (angle < -)
angle += ;
if (angle > )
angle -= ;
return Mathf.Clamp(angle, min, max); } }
3、然后在游戏运行的时候左右、上下滑动鼠标即可,也可以滚动鼠标滚轮
第二种:目前我没有测试,手上没有安卓机,有条件的可以进行测试一下。
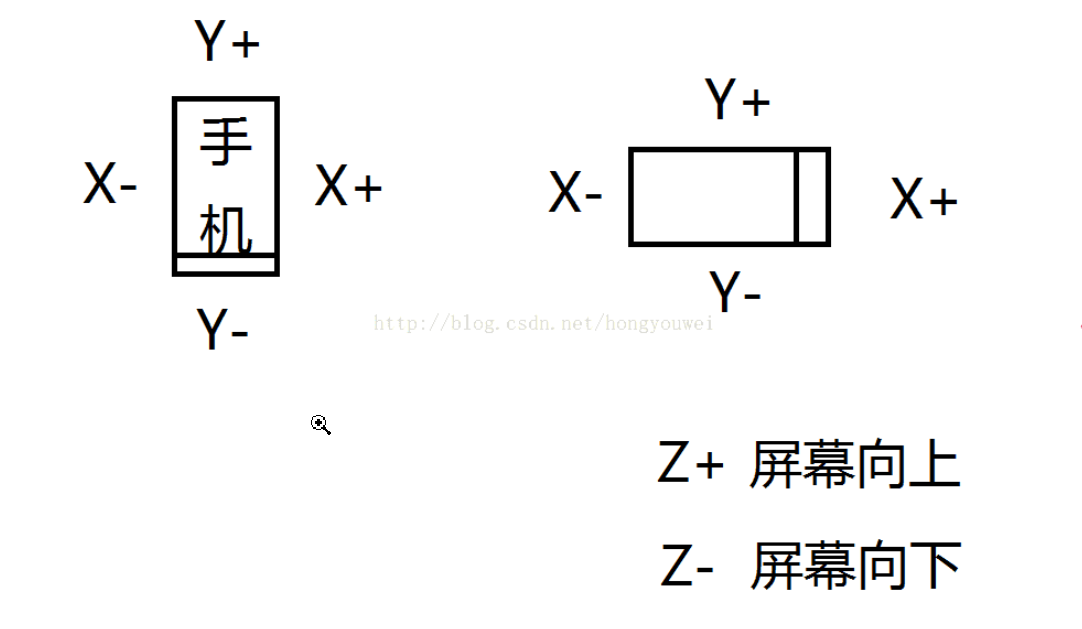
1、首先我们先了解移动端手机陀螺仪的向量方向。
Unity中重力感应的取值范围时 -1.0~1.0
X轴:home按键在下手机面朝天
向右旋转90度重力分量为1.0
向左旋转90度重力分量为-1.0
Y轴:Home按键在上手机背面朝自己重力分量为1.0
Home按键在下手机面朝自己重力分量为-1.0
Z轴:手机面朝地面重力分量为1.0
手机面朝天空重力分量为1.0
2、新建一Sphere,然后为其赋予材质,注意材质的Shader类型为:Mobile/particles/Alpha Blended,然后将做好的全景图贴上去
3、在摄像机上附加以下脚本,并将相机作为Sphere的子物体即可代码来源参考自
// ***********************************************************
// Written by Heyworks Unity Studio http://unity.heyworks.com/
// ***********************************************************
using UnityEngine; /// <summary>
/// Gyroscope controller that works with any device orientation.
/// </summary>
public class GyroController : MonoBehaviour
{
#region [Private fields] private bool gyroEnabled = true;
private const float lowPassFilterFactor = 0.2f; private readonly Quaternion baseIdentity = Quaternion.Euler(, , );
private readonly Quaternion landscapeRight = Quaternion.Euler(, , );
private readonly Quaternion landscapeLeft = Quaternion.Euler(, , -);
private readonly Quaternion upsideDown = Quaternion.Euler(, , ); private Quaternion cameraBase = Quaternion.identity;
private Quaternion calibration = Quaternion.identity;
private Quaternion baseOrientation = Quaternion.Euler(, , );
private Quaternion baseOrientationRotationFix = Quaternion.identity; private Quaternion referanceRotation = Quaternion.identity;
private bool debug = true; #endregion #region [Unity events] protected void Start ()
{
AttachGyro();
} protected void Update()
{
if (!gyroEnabled)
return;
transform.rotation = Quaternion.Slerp(transform.rotation,
cameraBase * ( ConvertRotation(referanceRotation * Input.gyro.attitude) * GetRotFix()), lowPassFilterFactor);
} protected void OnGUI()
{
if (!debug)
return;
GUILayout.Label("Orientation: " + Screen.orientation);
GUILayout.Label("Calibration: " + calibration);
GUILayout.Label("Camera base: " + cameraBase);
GUILayout.Label("input.gyro.attitude: " + Input.gyro.attitude);
GUILayout.Label("transform.rotation: " + transform.rotation); if (GUILayout.Button("On/off gyro: " + Input.gyro.enabled, GUILayout.Height()))
{
Input.gyro.enabled = !Input.gyro.enabled;
} if (GUILayout.Button("On/off gyro controller: " + gyroEnabled, GUILayout.Height()))
{
if (gyroEnabled)
{
DetachGyro();
}
else
{
AttachGyro();
}
} if (GUILayout.Button("Update gyro calibration (Horizontal only)", GUILayout.Height()))
{
UpdateCalibration(true);
} if (GUILayout.Button("Update camera base rotation (Horizontal only)", GUILayout.Height()))
{
UpdateCameraBaseRotation(true);
} if (GUILayout.Button("Reset base orientation", GUILayout.Height()))
{
ResetBaseOrientation();
} if (GUILayout.Button("Reset camera rotation", GUILayout.Height()))
{
transform.rotation = Quaternion.identity;
}
} #endregion #region [Public methods] /// <summary>
/// Attaches gyro controller to the transform.
/// </summary>
private void AttachGyro()
{
gyroEnabled = true;
ResetBaseOrientation();
UpdateCalibration(true);
UpdateCameraBaseRotation(true);
RecalculateReferenceRotation();
} /// <summary>
/// Detaches gyro controller from the transform
/// </summary>
private void DetachGyro()
{
gyroEnabled = false;
} #endregion #region [Private methods] /// <summary>
/// Update the gyro calibration.
/// </summary>
private void UpdateCalibration(bool onlyHorizontal)
{
if (onlyHorizontal)
{
var fw = (Input.gyro.attitude) * (-Vector3.forward);
fw.z = ;
if (fw == Vector3.zero)
{
calibration = Quaternion.identity;
}
else
{
calibration = (Quaternion.FromToRotation(baseOrientationRotationFix * Vector3.up, fw));
}
}
else
{
calibration = Input.gyro.attitude;
}
} /// <summary>
/// Update the camera base rotation.
/// </summary>
/// <param name='onlyHorizontal'>
/// Only y rotation.
/// </param>
private void UpdateCameraBaseRotation(bool onlyHorizontal)
{
if (onlyHorizontal)
{
var fw = transform.forward;
fw.y = ;
if (fw == Vector3.zero)
{
cameraBase = Quaternion.identity;
}
else
{
cameraBase = Quaternion.FromToRotation(Vector3.forward, fw);
}
}
else
{
cameraBase = transform.rotation;
}
} /// <summary>
/// Converts the rotation from right handed to left handed.
/// </summary>
/// <returns>
/// The result rotation.
/// </returns>
/// <param name='q'>
/// The rotation to convert.
/// </param>
private static Quaternion ConvertRotation(Quaternion q)
{
return new Quaternion(q.x, q.y, -q.z, -q.w);
} /// <summary>
/// Gets the rot fix for different orientations.
/// </summary>
/// <returns>
/// The rot fix.
/// </returns>
private Quaternion GetRotFix()
{
#if UNITY_3_5
if (Screen.orientation == ScreenOrientation.Portrait)
return Quaternion.identity; if (Screen.orientation == ScreenOrientation.LandscapeLeft || Screen.orientation == ScreenOrientation.Landscape)
return landscapeLeft; if (Screen.orientation == ScreenOrientation.LandscapeRight)
return landscapeRight; if (Screen.orientation == ScreenOrientation.PortraitUpsideDown)
return upsideDown;
return Quaternion.identity;
#else
return Quaternion.identity;
#endif
} /// <summary>
/// Recalculates reference system.
/// </summary>
private void ResetBaseOrientation()
{
baseOrientationRotationFix = GetRotFix();
baseOrientation = baseOrientationRotationFix * baseIdentity;
} /// <summary>
/// Recalculates reference rotation.
/// </summary>
private void RecalculateReferenceRotation()
{
referanceRotation = Quaternion.Inverse(baseOrientation)*Quaternion.Inverse(calibration);
} #endregion
}
Unity做360度的全景照片的更多相关文章
- 利用Canvas实现360度浏览
前言:最近几个月来到新公司,主要从事移动端方面的开发,有时候也挺忙挺累的,于是就好一段时间没写博客了.其实自己在这几个月里,自己对canvas以及createjs和egret都有了一定程度上的认识与掌 ...
- 使用Javascript来创建一个响应式的超酷360度全景图片查看幻灯效果
360度的全景图片效果常常可以用到给客户做产品展示,今天这里我们推荐一个非常不错的来自Robert Pataki的360全景幻灯实现教程,这里教程中将使用javascript来打造一个超酷的全景幻灯实 ...
- 基于mysql数据库集群的360度水平切割
1.why sharding? 我们都知道,信息行业发展日益迅速,积累下来的数据信息越来越多,互联网公司门要维护的数据日益庞大.设想一下,假如腾讯公司只用一个数据库的一张表格来存储所有qq注册用户的登 ...
- threesixty.min.js 和jquery.threesixty.js使用总结----实现360度展示
最近公司做一个项目需要360度展示汽车的外观,就用到了threesixty.min.js,自己总结一下使用方法: treesixty.min.js 源码: /*! threesixty-slider ...
- 安卓端360度全景图的html5实现
这里是一款旅游相关的安卓应用,其中虚拟旅游的功能采用html5的360度全景图技术实现,使用户能够身临其境的感受旅游景点的风光. 此处引入了ddpanorama插件,它的原理是在canvas上绘制全景 ...
- jQuery Panorama Viewer – 360度全景展示插件
jQuery Panorama Viewer 这款插件可以帮助你在网站中嵌入全景图片.要做到这一点,首先只需要在页面中引入最新的 jQuery 库,以及 jquery.panorama_viewer. ...
- html5人物图片360度立体旋转
体验效果:http://hovertree.com/texiao/html5/10.htm 下载:http://hovertree.com/hvtart/bjae/t16oddyt.htm 代码如下: ...
- C# 图片旋转360度程序
这几天开发一个程序,需要将一个图片旋转360度然后每一个角度保存下来.刚开始本来想着是让美工弄的,但是让一个美工手动转360度,她会喷你一脸. using System; using System.C ...
- [置顶] ios 360度旋转效果demo
demo功能:用UIimageView实现360度旋转效果. demo说明:iPhone6.1 测试成功.主要代码在:FVImageSequence.m中.在touchesMoved事件中,通过替换U ...
随机推荐
- Vs2013 agent 安装
1. 在windows 2008 R2上安装vs2013 agents需要满足: 1) .net 3.5 2) sp1补丁包(同windows7 sp1) 2. 安装vs2013 agents 步骤如 ...
- 「6月雅礼集训 2017 Day5」学外语
[题目大意] 给出$\{P_i\}$,求经过以下操作后能够得到的不同序列个数: 第一步,选择$i, j$,交换$P_i,P_j$:第二步,把所有$P_x=i$的$P_x$变为$j$,把所有$P_x=j ...
- 【BZOJ】4530: [Bjoi2014]大融合
[题意]给定n个点的树,从无到有加边,过程中动态询问当前图某条边两端连通点数的乘积,n<=10^5. [算法]线段树合并+并查集 (||LCT(LCT维护子树信息 LCT维护子树信息(+启发式合 ...
- MyBatis 系列五 之 延迟加载、一级缓存、二级缓存设置
MyBatis的延迟加载.一级缓存.二级缓存设置 首先我们必须分清延迟加载的适用对象 延迟加载 MyBatis中的延迟加载,也称为懒加载,是指在进行关联查询时,按照设置延迟加载规则推迟对关联对象的se ...
- Linux中的vim实用命令 -- (转)
VI 有2个模式.我自己定义的 1. 命令模式,一开始进去的模式.一些指定的键盘输入会产生不同的效果 2. 输入模式,在命令模式下输入冒号(:) 就可以进入输入模式.按Esc键即可退出命令模式. ...
- javascript中null与undefined的区别
1.null null是一个对象,表示一个空对象指针,typeof(null)返回object,null参与运算时会转化为0,将对象初始化为null,可以知道变量是否保存了对象的引用 2.undefi ...
- Educational Codeforces Round 26 F. Prefix Sums 二分,组合数
题目链接:http://codeforces.com/contest/837/problem/F 题意:如题QAQ 解法:参考题解博客:http://www.cnblogs.com/FxxL/p/72 ...
- 设计模式之笔记--原型模式(Prototype)
原型模式(Prototype) 定义 原型模式(Prototype),用原型实例指定创建对象的种类,并且通过拷贝这些原型创建新的对象. 类图 描述 提供一个克隆自身的接口--Clone方法. 应用场景 ...
- linux命令(17):pwd命令
1:查看当前工作目录的完整路径命令:pwd 2:目录连接链接时,pwd -P 显示出实际路径,而非使用连接(link)路径:pwd显示的是连接路径: [root@host-172-168-80-55 ...
- 字符串截取,SubString
aaarticlea/png;base64,iVBORw0KGgoAAAANSUhEUgAAAk8AAACYCAIAAAByAZqHAAAYgklEQVR4nO2dL28ku5qHTS4ctuTSQf ...