opencv::模板匹配(Template Match)
模板匹配介绍
模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域。
所以模板匹配首先需要一个模板图像T(给定的子图像)
另外需要一个待检测的图像-源图像S
工作方法,在带检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。

OpenCV中提供了六种常见的匹配算法如下:
1、计算平方不同

2、计算相关性

3、计算相关系数
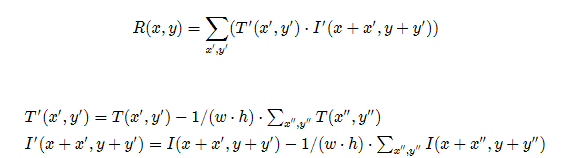
模板匹配介绍 – 匹配算法介绍
1、计算归一化平方不同

2、计算归一化相关性

3、计算归一化相关系数

matchTemplate(
InputArray image, // 源图像,必须是8-bit或者32-bit浮点数图像
InputArray templ, // 模板图像,类型与输入图像一致
OutputArray result, // 输出结果,必须是单通道32位浮点数,假设源图像WxH,模板图像wxh, 则结果必须为W-w+1, H-h+1的大小。
int method, // 使用的匹配方法
InputArray mask=noArray() //(optional)
)
Mat src, temp, dst;
int match_method = TM_SQDIFF;
int max_track = ; void Match_Demo(int, void*);
int main(int argc, char** argv) { src = imread(STRPAHT2);
temp = imread(STRPAHT3); if (src.empty() || temp.empty()) {
printf("could not load image...\n");
return -;
} imshow("INPUT_T", src);
createTrackbar("Match Algo Type:", "OUTPUT_T", &match_method, max_track, Match_Demo);
Match_Demo(, ); waitKey();
return ;
} void Match_Demo(int, void*) {
int width = src.cols - temp.cols + ;
int height = src.rows - temp.rows + ;
Mat result(width, height, CV_32FC1); matchTemplate(src, temp, result, match_method, Mat());
normalize(result, result, , , NORM_MINMAX, -, Mat()); Point minLoc;
Point maxLoc;
double min, max;
src.copyTo(dst);
Point temLoc;
minMaxLoc(result, &min, &max, &minLoc, &maxLoc, Mat());
if (match_method == TM_SQDIFF || match_method == TM_SQDIFF_NORMED) {
temLoc = minLoc;
}
else {
temLoc = maxLoc;
} rectangle(dst, Rect(temLoc.x, temLoc.y, temp.cols, temp.rows), Scalar(, , ), , );
rectangle(result, Rect(temLoc.x, temLoc.y, temp.cols, temp.rows), Scalar(, , ), , ); imshow("OUTPUT_T", result);
imshow("match_t", dst);
}
opencv::模板匹配(Template Match)的更多相关文章
- Atitit opencv模板匹配attilax总结
Atitit opencv模板匹配attilax总结 找一幅图像的匹配的模板,可以在一段视频里寻找出我们感兴趣的东西,比如条形码的识别就可能需要这样类似的一个工作提取出条形码区域(当然这样的方法并不鲁 ...
- Atitit opencv 模板匹配
Atitit opencv 模板匹配 1.1. 图片1 1.2. Atitit opencv 模板匹配 6中匹配算法貌似效果区别不大1 1.3. 对模板缩放的影响 一般的缩放可以,太大了就歇菜了.. ...
- opencv 模板匹配与滑动窗口(单匹配) (多匹配)
1单匹配: 测试图片: code: #include <opencv\cv.h> #include <opencv\highgui.h> #include <open ...
- OpenCV模板匹配函数matchTemplate详解
参考文档:http://www.opencv.org.cn/opencvdoc/2.3.2/html/doc/tutorials/imgproc/histograms/template_matchin ...
- OpenCV——模板匹配
minMaxLoc函数: void minMaxLoc( const Mat& src, double* minVal, double* maxVal=0, Point* minLoc=0, ...
- opencv模板匹配查找图像(python)
#!/usr/bin/env python3 # -*- coding: utf-8 -*- import cv2 import numpy as np from cv2 import COLOR_B ...
- 关于opencv模板匹配功能的项目测试记录
模板匹配功能介绍的很好的一篇博客:https://www.cnblogs.com/XJT2018/p/9934139.html 就如上述博客所言:“若原图像中的匹配目标发生旋转或大小变化,该算法无效. ...
- opencv 模板匹配, 已解决模板过大程序不工作的bug
#include <opencv2/opencv.hpp> #include <opencv2/highgui/highgui.hpp> #include <opencv ...
- opencv模板匹配有趣的链接
https://docs.opencv.org/3.0-beta/doc/py_tutorials/py_imgproc/py_template_matching/py_template_matchi ...
随机推荐
- 使用python合并excel
当工作碰到需要将几个excel合并时,比如一个表,收集每个人的个人信息,陆续收回来就是十几张甚至几十张表,少了还好解决,但是很多的话就不能一个一个去复制了,这时候就想到了python,Python大法 ...
- linux 操作系统级别监控 free命令
free命令可以查看当前系统内存的使用情况 free -m 以MB为单位 free -k 以KB为单位 free -m 以MB为单位显示系统内存的使用情况,同理,也可以使用-k.-g等其他的单位显示 ...
- Hive导入数据到HBase,再与Phoenix映射同步
1. 创建HBase 表 create 'hbase_test','user' 2. 插入数据 put 'hbase_test','111','user:name','jack' put 'hbase ...
- Day 23 系统服务之救援模式
1.CentOS6与Centos 7启动流程 4.运行级别C6&C7 0 关机 1 单用户模式 (超级权限 必须面对实体硬件) 2 暂未使用 3 字符界面(黑框) 4 暂未使用 5 图形界面 ...
- PTA A1015
A1015 Reversible Primes (20 分) 题目内容 A reversible prime in any number system is a prime whose "r ...
- 61 (OC)* 代理 block 通知 代理 kvo
1.从源头上理解和区别block和delegate delegate运行成本低,block的运行成本高. block出栈需要将使用的数据从栈内存拷贝到堆内存,当然对象的话就是加计数,使用完或者bloc ...
- 客户端与服务端的事件watcher源码阅读
watcher存在的必要性 举个特容易懂的例子: 假如我的项目是基于dubbo+zookeeper搭建的分布式项目, 我有三个功能相同的服务提供者,用zookeeper当成注册中心,我的三个项目得注册 ...
- Pytorch-数学运算
引言 本篇介绍tensor的数学运算. 基本运算 add/minus/multiply/divide matmul pow sqrt/rsqrt round 基础运算 可以使用 + - * / 推荐 ...
- 用call或bind实现bind()
一.bind方法 让我们看一下MDN上对bind方法的解释 bind()方法创建一个新的函数,在bind()被调用时,这个新函数的this被bind的第一个参数指定,其余的参数将作为新函数的参数供调用 ...
- tomcat设定shared lib共享同样的jar
在项目越来越多的时候,部署在tomcat的发布包也会越来越多,这样难免有很多相同的jar会被加载,占用大量的永久存续区内存,通过设定shared lib来控制相同的jar只加载一个,这样有以下好处: ...