图像特征与描述子(直方图, 聚类, 边缘检测, 兴趣点/关键点, Harris角点, 斑点(Blob), SIFI, 纹理特征)
1.直方图
用于计算图片特征,表达, 使得数据具有总结性, 颜色直方图对数据空间进行量化,好比10个bin
2. 聚类
类内对象的相关性高
类间对象的相关性差
常用算法:kmeans, EM算法, meanshift, 谱聚类(密度聚类), 层次聚类
kmeans聚类
选取k个类中心,随机选取
计算每个点跟k个类中心的位置
把数据点分配给距离最近的一个类中心
计算新的类中心-对该类中的所有点取均值
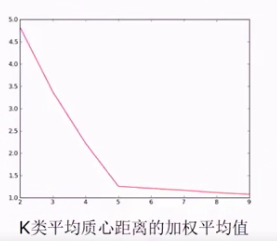
类中心数K的选取
K类平均质心的距离加权平均值, 当k=5时的斜率发生变化,我们可以选取5作为分类的个数
kmeans ++ 半随机(初始点的选取)
第一类中心 - 随机选取
记D(x) 为数据点x距离最近的聚类中心的距离
选取下一个聚类中心, 选取的概率正比于D(x) ^ 2
以此类推,到第k个
量化颜色直方图
聚类颜色直方图: 使用聚类算法对像素点颜色向量进行聚类, 单元由聚类中心代表
3. 边缘检测
像素明显变化的区域, 具有丰富的语义信息
用途: 物体识别,几何视角变化
定义: 像素函数快速变化的区域, 一阶导数的极值区域,二阶导数的0点位置
步骤:
先高斯去噪,再使用一阶导数获取极值
公式: 对x方向进行求导 б 表示的是标准差 对y方向进行求导

梯度幅值/强度
hx(x,y)^ 2 + hy(x, y) ^ 2
梯度(增加最快)方向
arctan(hy(x, y)/ hx(x, y))
4. 兴趣点/关键点
稳定局部
特点: 可重复性,显著性
抗图片变化
外貌变化(亮度,光照)
几何变化(平移, 选择,尺度)
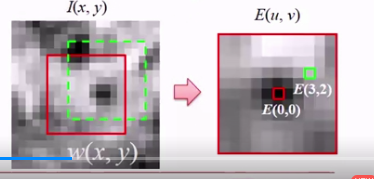
5.Harris角点
一种显著点:在任何方向上移动小观察窗,导致大的像素变动
E(u, v) = ΣW(x, y)[I(x+u, y+v)-I(x, y)] ^2
W(x, y)是高斯函数进行加权的, x,y表示当前位置, u和v表示移动了的位置
6.斑点(Blob)
拉普拉斯梯度:一阶导数极值点 - 二阶导数零点
梯度/边缘可以通过查找:二阶导数接近零, 一阶导数足够大
对噪声很敏感, 需要先做高斯平滑
公式: Δf = δ2f / δ2x + δ2f / δ2y 对x求二阶导, 对y方向求二阶导
斑点是找拉普拉斯的极值
边缘是找拉普拉斯的零值
7.SIFT
SIFT特征计算
计算高斯差分(DoG)尺度空间,获取极值点
特征点处理: 位置插值, 去除低对比度点, 去除边缘点
方向估计: 2*2网格, 8个方向,获得最高值为关键点的主方向,特征点方向归一化,即所有方向为同一方向
描述子提取: 在旋转坐标上采样16*16的像素窗, 4*4网格,8方向直方图,总共178维
8.纹理特征
HOG(方向梯度直方图)
梯度幅值,方向 s = sqrt(sx^2 + sy^2)
Block 拆分
16*16的block 步长是8, 包含2*2个cell, 每个cell8*8, 9个方向
积累梯度幅值,使用位置高斯加权,使用相邻bin线性插值
64&128的维度图:7*15 * (2*2) * 9 = 3780
LBP(局部二值模式)
将每个像素点与周围点大小半径比较,半径R的圆上,均匀采样P个点,根据赫值大小,量化为0或1
图像特征与描述子(直方图, 聚类, 边缘检测, 兴趣点/关键点, Harris角点, 斑点(Blob), SIFI, 纹理特征)的更多相关文章
- BRIEF特征点描述子
简介 BRIEF是2010年的一篇名为<BRIEF:Binary Robust Independent Elementary Features>的文章中提出,BRIEF是对已检测到的特征点 ...
- 第三讲_图像特征与描述Image Feature Descriptor
第三讲_图像特征与描述Image Feature Descriptor 概要 特征提取方法 直方图 对图片数据/特征分布的一种统计:对不同量进行直方图统计:可以表示灰度,颜色,梯度,边缘,形状,纹理, ...
- Brief描述子
一.Brief算法 1.基本原理 BRIEF是2010年的一篇名为<BRIEF:Binary Robust Independent Elementary Features>的文章中提出,B ...
- [OpenCV-Python] OpenCV 中图像特征提取与描述 部分 V (一)
部分 V图像特征提取与描述 OpenCV-Python 中文教程(搬运)目录 29 理解图像特征 目标本节我会试着帮你理解什么是图像特征,为什么图像特征很重要,为什么角点很重要等.29.1 解释 我相 ...
- (一)ORB描述子提取
ORBSLAM2中使用ORB描述子的方法 经典的视觉SLAM系统大体分为两种:其一是基于特征点法的,其二是基于直接法的.那么本文主要就讲特征点法的SLAM. 基于特征点法的视觉SLAM系统典型的有PT ...
- LBP纹理特征[转自]
LBP方法(Local binary patterns)是一个计算机视觉中用于图像特征分类的一个方法.LBP方法在1994年首先由T. Ojala, M.Pietikäinen, 和 D. Harwo ...
- 图像的特征工程:HOG特征描述子的介绍
介绍 在机器学习算法的世界里,特征工程是非常重要的.实际上,作为一名数据科学家,这是我最喜欢的方面之一!从现有特征中设计新特征并改进模型的性能,这就是我们进行最多实验的地方. 世界上一些顶级数据科学家 ...
- SIFT算法:特征描述子
SIFT算法:DoG尺度空间生产 SIFT算法:KeyPoint找寻.定位与优化 SIFT算法:确定特征点方向 SIFT算法:特征描述子 目录: 1.确定描述子采样区域 2.生成描述子 2.1 旋 ...
- SIFT解析(三)生成特征描述子
以上两篇文章中检测在DOG空间中稳定的特征点,lowe已经提到这些特征点是比Harris角点等特征还要稳定的特征.下一步骤我们要考虑的就是如何去很好地描述这些DOG特征点. 下面好好说说如何来描述这些 ...
随机推荐
- recv,recvfrom,send,sendto
一般情况下:send(),recv()用于TCP,sendto()及recvfrom()用于UDP 但是send(),recv()也可以用于UDP,sendto()及recvfrom()也可以用于TC ...
- 前端 crypto-js aes 加解密
下载:npm install crypto-js --save 需要定义两个方法 ,分别是用于加密和解密,这里我将它放在了 utils 文件夹下,命名为 secret.js ,其具体代码如下: con ...
- Entity Framework 数据并发访问错误原因分析与系统架构优化
博客地址 http://blog.csdn.net/foxdave 本文主要记录近两天针对项目发生的数据访问问题的分析研究过程与系统架构优化,我喜欢说通俗的白话,高手轻拍 1. 发现问题 系统新模块上 ...
- Python基础学习----异常
''' 异常: 程序在运行的时候,Python的解释器遇到一个错误会停止运行. 并且会提供错误的信息,这就是异常 抛出异常: 程序停止执行并且提示错误信息这个动作就是抛出异常(raise Except ...
- Winform工具栏ToolStrip和状态栏StatusStrip
工具栏和状态栏的设置与前面的菜单基本相似 1.ToolStrip 从工具栏选项卡上拖一个放入窗体即可,位置也是通过其Dock设置的.先上一张图,红色部分就是工具栏,工具栏中可以放置如图下拉菜单中的Bu ...
- Java中,什么时候用logger.debuge,info,error
简单的说,就是配合log的等级过滤输出比如,你在开发的时候,要验证一个方法有没有被调用到,为了方便调试,通常会在这个方法开始的时候加一些system.out.但是项目真正发布的时候这些代码通常是要移除 ...
- create newline in Github Bio
/********************************************************************************* * create newline ...
- PyQt4 py2exe 打包 HardwareManager
#!/usr/bin/env python # -*- coding: UTF-8 -*- # 1. 以下代码保存在HardwareManager项目的目录下,名称叫:setup.py: # 2. 打 ...
- bzoj 2212 Tree Rotations
bzoj 2212 Tree Rotations 考虑一个子树 \(x\) 的左右儿子分别为 \(ls,rs\) .那么子树 \(x\) 内的逆序对数就是 \(ls\) 内的逆序对数,\(rs\) 内 ...
- html页面下拉列表中动态添加后台数据(格式化数据,显示出数据的层次感)
html页面下拉列表中动态添加后台数据(格式化数据,显示出数据的层次感) 效果图: 运行原理和技术: 当页面加载完毕,利用jquery向后台发送ajax请求,去后台拼接<select>&l ...