P3379最近公共祖先(LCA)
题目描述
如题,给定一棵有根多叉树,请求出指定两个点直接最近的公共祖先。
输入输出格式
输入格式:
第一行包含三个正整数N、M、S,分别表示树的结点个数、询问的个数和树根结点的序号。
接下来N-1行每行包含两个正整数x、y,表示x结点和y结点之间有一条直接连接的边(数据保证可以构成树)。
接下来M行每行包含两个正整数a、b,表示询问a结点和b结点的最近公共祖先。
输出格式:
输出包含M行,每行包含一个正整数,依次为每一个询问的结果。
输入输出样例
5 5 4
3 1
2 4
5 1
1 4
2 4
3 2
3 5
1 2
4 5
4
4
1
4
4
说明
时空限制:1000ms,128M
数据规模:
对于30%的数据:N<=10,M<=10
对于70%的数据:N<=10000,M<=10000
对于100%的数据:N<=500000,M<=500000
样例说明:
该树结构如下:
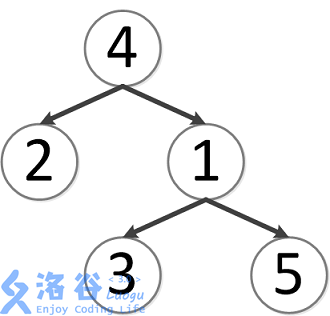
第一次询问:2、4的最近公共祖先,故为4。
第二次询问:3、2的最近公共祖先,故为4。
第三次询问:3、5的最近公共祖先,故为1。
第四次询问:1、2的最近公共祖先,故为4。
第五次询问:4、5的最近公共祖先,故为4。
故输出依次为4、4、1、4、4。
//就是个板子,但是各种卡还要用读入优化...
//边不要用vector存会超时!!!
#include<iostream>
#include<cstdio>
#include<cstring>
#define maxn 500010
#define S 21 using namespace std;
int deep[maxn],head[maxn],p1,p2,n,m,num,ans,s,x,y,fa[maxn][S+];
struct node {
int from;
int to;
int next;
}e[maxn*]; void add(int from,int to)
{
e[++num].from=from;
e[num].to=to;
e[num].next=head[from];
head[from]=num;
} int init()
{
int x=,f=;char c=getchar();
while(c>''||c<''){if(c=='-')f=-;c=getchar();}
while(c>=''&&c<=''){x=x*+c-'';c=getchar();}
return x*f;
} void swap(int &a,int &b)
{
int t=a;a=b;b=t;
} void get_fa()
{
for(int j=;j<=S;j++)
for(int i=;i<=n;i++)
fa[i][j]=fa[fa[i][j-]][j-];
} void Dfs(int now,int from,int c)
{
fa[now][]=from;
deep[now]=c;
for(int i=head[now];i;i=e[i].next)
{
int v=e[i].to;
if(v!=from)
Dfs(v,now,c+);
}
} int get_same(int a,int t)
{
for(int i=;i<S;i++)
if(t&(<<i)) a=fa[a][i];
return a;
} int LCA(int a,int b)
{
if(deep[a]<deep[b]) swap(a,b);
a=get_same(a,deep[a]-deep[b]);
if(a==b) return a;
for(int i=S;i>=;i--) {
if(fa[a][i]!=fa[b][i])
{
a=fa[a][i];
b=fa[b][i];
}
}
return fa[a][];
} int main()
{
n=init();m=init();s=init();
int x,y;
for(int i=;i<n;i++)
{
x=init();y=init();
add(x,y);
add(y,x);
}
Dfs(s,s,);
get_fa();
for(int i=;i<=m;i++)
{
p1=init();p2=init();
int ans=LCA(p1,p2);
printf("%d\n",ans);
}
return ;
}
P3379最近公共祖先(LCA)的更多相关文章
- Luogu 2245 星际导航(最小生成树,最近公共祖先LCA,并查集)
Luogu 2245 星际导航(最小生成树,最近公共祖先LCA,并查集) Description sideman做好了回到Gliese 星球的硬件准备,但是sideman的导航系统还没有完全设计好.为 ...
- POJ 1470 Closest Common Ancestors(最近公共祖先 LCA)
POJ 1470 Closest Common Ancestors(最近公共祖先 LCA) Description Write a program that takes as input a root ...
- POJ 1330 Nearest Common Ancestors / UVALive 2525 Nearest Common Ancestors (最近公共祖先LCA)
POJ 1330 Nearest Common Ancestors / UVALive 2525 Nearest Common Ancestors (最近公共祖先LCA) Description A ...
- [模板] 最近公共祖先/lca
简介 最近公共祖先 \(lca(a,b)\) 指的是a到根的路径和b到n的路径的深度最大的公共点. 定理. 以 \(r\) 为根的树上的路径 \((a,b) = (r,a) + (r,b) - 2 * ...
- 【lhyaaa】最近公共祖先LCA——倍增!!!
高级的算法——倍增!!! 根据LCA的定义,我们可以知道假如有两个节点x和y,则LCA(x,y)是 x 到根的路 径与 y 到根的路径的交汇点,同时也是 x 和 y 之间所有路径中深度最小的节 点,所 ...
- P3379 最近公共祖先(LCA) 洛谷
题意简单明了(这就是个模板). 就是让我们找2个节点的公共祖先而已,但我们要讲的做法不是生硬的爆搜,而且直接搜好像过不去…… 这次就讲我往后拖了n多天才开始学了倍增LCA. 嗯,这个题,如果2个节点的 ...
- 最近公共祖先 lca (施工ing)
声明 咳咳,进入重难点的图论算法之一(敲黑板): 题目: 洛谷 P3379 先放标程,施工ing,以后补坑!!!(实在太难,一个模板这么长 [ 不过好像还是没有 AC自动机 长哎 ],注释都打半天,思 ...
- 图论2 最近公共祖先LCA
模板 吸取洛谷P3379的教训,我决定换板子(其实本质都是倍增是一样的),把vector换成了边表 输入格式: 第一行包含三个正整数N.M.S,分别表示树的结点个数.询问的个数和树根结点的序号. 接下 ...
- 学习笔记--最近公共祖先(LCA)的几种求法
前言: 给定一个有根树,若节点\(z\)是两节点\(x,y\)所有公共祖先深度最大的那一个,则称\(z\)是\(x,y\)的最近公共祖先(\(Least Common Ancestors\)),简称\ ...
随机推荐
- QQ浏览器占用资源真的大
Edge 和 QQ浏览器 对比 正常情况下: QQ浏览器 看1个直播频道 ,CPU就几乎是在90% usage 范围 ,看2 个 就非常卡 下面就是对比图 Edge 我个人觉得 Edge 比 QQ好用 ...
- Gym - 101670A Amusement Anticipation(CTU Open Contest 2017 签到题)
题目&题意: 倒着找处于最后位置的等差数列的开头的位置. 例: 1 5 3 4 5 6 3 4 5 6是等差数列,它的开头的位置是3 PS: 读题真的很重要!!!!多组输入,上来就读错了!! ...
- html option选中 回显 取值
1.html <select class="form-control" id="sex"> <option value="-1&qu ...
- openpyxl操作excel文件
https://blog.csdn.net/hunter_wyh/article/details/78498323
- Python的import module与form module import的区别
import moduleName 如果要使用moduleName模块中的方法时,是moduleName.method(点方法), 比如moduleName中有个方法是set,则使用的是moduleN ...
- js之循环语句
<!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF-8&quo ...
- CF2B The least round way
[题解] 可以发现10的因数除了1和10之外只有2和5了,那么走过的路径上各个数字的2的因数个数之和.5的因数个数之和中较小的一个即是答案.这样的话DP即可.同时需要注意有0的情况,有0的时候有一个答 ...
- [bzoj3012][luogu3065][USACO12DEC][第一!First!] (trie+拓扑排序判环)
题目描述 Bessie has been playing with strings again. She found that by changing the order of the alphabe ...
- 不动点(Fixed Point)
本系列文章由 @yhl_leo 出品,转载请注明出处. 文章链接: http://blog.csdn.net/yhl_leo/article/details/51735818 在数学中,函数的不动点( ...
- hdu 1533KM算法
#include<stdio.h> #include<string.h> #include<math.h> #define inf 0x3fffffff #defi ...