安装运行Rovio
https://github.com/ethz-asl/rovio下载代码,该存储库包含ROVIO(Robust Visual Inertial Odometry)框架。
https://github.com/ethz-asl/kindr
视频: https : //youtu.be/ZMAISVy-6ao
论文: http : //dx.doi.org/10.3929/ethz-a-010566547
两种安装方法:
[1]Install without opengl scene
Dependencies:
- ros
- kindr (https://github.com/ethz-asl/kindr)
- lightweight_filtering (as submodule, use "git submodule update --init --recursive")
#!command catkin build rovio --cmake-args -DCMAKE_BUILD_TYPE=Release
[2]Install with opengl scene
Additional dependencies: opengl, glut, glew
(sudo apt-get install freeglut3-dev, sudo apt-get install libglew-dev)
安装opengl过程:http://www.cnblogs.com/Jessica-jie/p/6607590.html
在安装opengl过程中已经执行了此命令(sudo apt-get install freeglut3-dev),
只需安装此依赖:sudo apt-get install libglew-dev
#!command catkin build rovio --cmake-args -DCMAKE_BUILD_TYPE=Release -DMAKE_SCENE=ON
具体步骤:
1.创建catkin workspace
mkdir -p ~/workspace_rovio/src
cd ~/workspace_rovio
catkin_make
2.安装kindr(路径/opt/kindr)
[1]安装依赖项
sudo add-apt-repository ppa:ethz-asl/common #通过发布将项目PPA添加到您的APT来源
sudo apt-get update #重新同步您的包索引文件,更新
sudo apt-get install ros-indigo-kindr-* #安装所有项目包及其依赖关系
[2]Building with cmake编译(sudo -s)
mkdir build
cd build
cmake ..
sudo make install
[3]Build the documentation with Doxygen:建立文档利用Doxygen
进入到/opt/kindr/build中,
make doc
The doxygen documentation can be found here:
/opt/kindr/doc/html/index.html (待检验,和安装步骤结果有出入)
3.安装rovio
进入新建的workspace_rovio/src下
git clone https://github.com/ethz-asl/rovio.git
进入rovio目录下,下载子模块(关于git submodule详细知识http://www.cnblogs.com/Jessica-jie/p/6700134.html)
git submodule update --init --recursive
退出到workspace_rovio下,运行
catkin_make rovio --cmake-args -DCMAKE_BUILD_TYPE=Release -DMAKE_SCENE=ON
catkin_make
出现错误,修改:http://www.cnblogs.com/Jessica-jie/p/6959309.html
4.运行欧元数据集 Euroc Datasets
rovio_node.launch文件加载参数,使得ROVIO在Euroc Datasets上正常运行。 数据集可从以下网址获得: http : //projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
修改rovio/launch/rovio_rosbag_node.launch中的filename参数,将其改为实际rosbag的目录
<param name="rosbag_filename" value="/home/rovio_workspace/catkin/src/rovio/MH_01_easy.bag"/>
打开命令窗口:
roscore
打开新窗口,进入workspace_rovio工作空间:
$ source devel/setup.bash
$ roslaunch rovio rovio_node.launch
等同于 rosrun rovio rovio_node
打开新窗口:
$ rosbag play /home/wj/Downloads/dataset/EuRoC/ROS_bag/MH_01_easy.bag
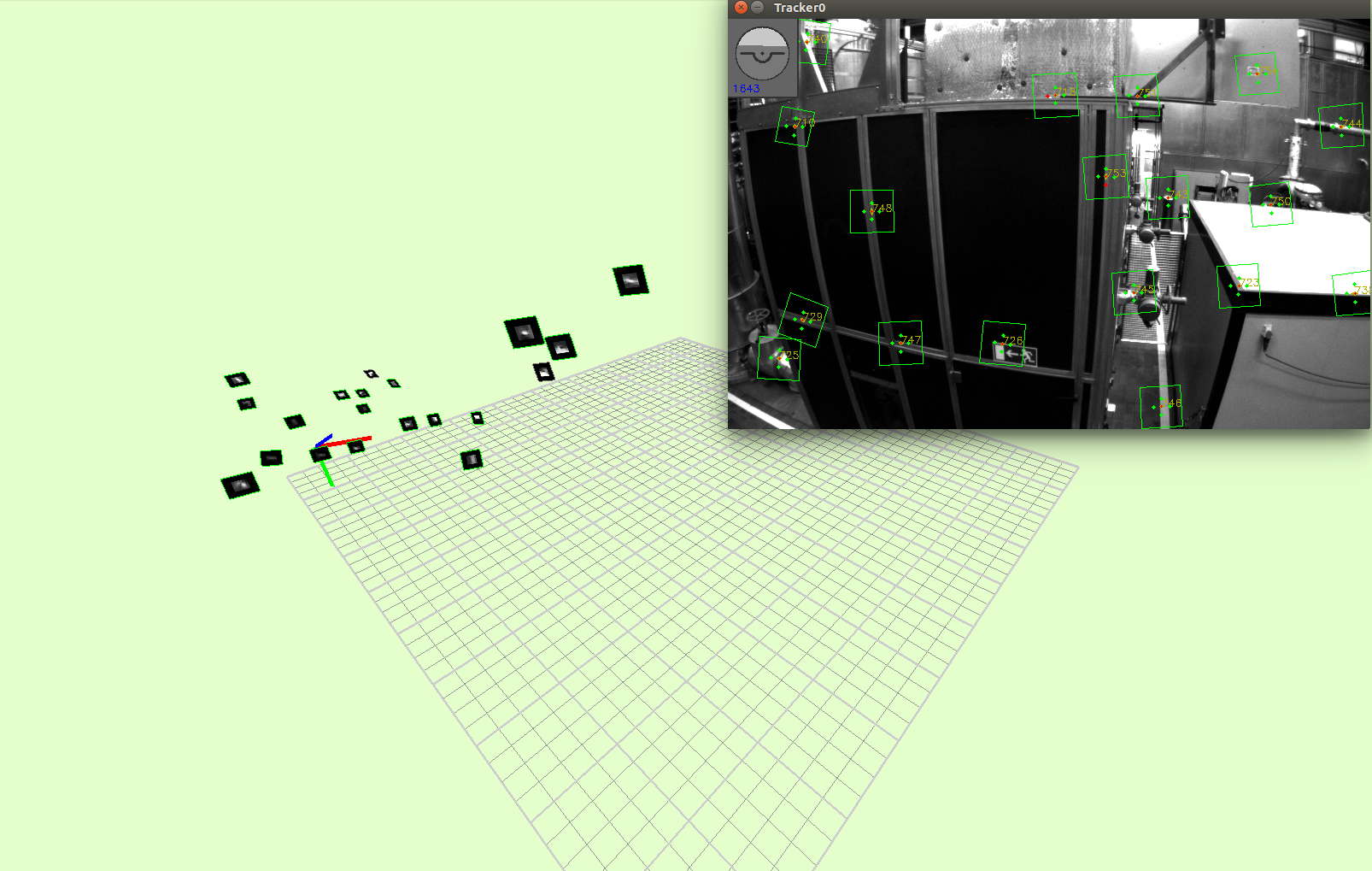
结果:
5.将其运动路径在rviz中显示
打开一个终端,运行rviz,它的默认保存路径 /home/wj/.rviz/default.rviz
在一个控制台中运行 $ roscore
在另一个控制台中运行 $ rosrun rviz rviz
你可以通过添加---“add”,来添加你想要的显示,http://blog.csdn.net/bluewhalerobot/article/details/73658344
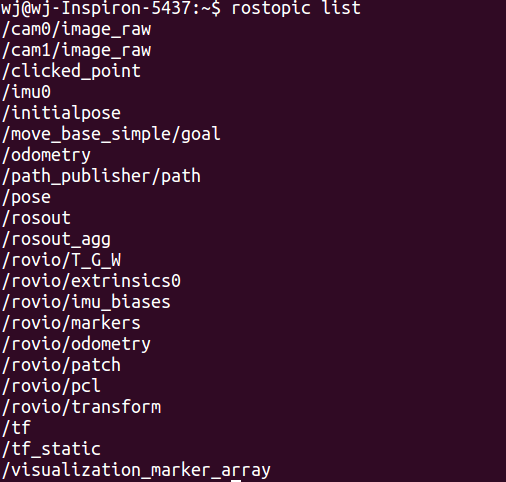
并且设置topic,当前节点的话题可用以下命令查看。
你可以将default.rviz剪切出来放到你的工作空间中,并给它重命名rovio_rviz_config.rviz
如果一个程序的运动过程未在rviz中显示出来,可以通过[1]书写.launch文件设置节点在在rviz中显示
<node name="rvizvisualisation" pkg="rviz" type="rviz" args="-d $(find rovio)/launch/rovio_rviz_config.rviz" />
[2]等同于---rosrun rviz rviz -d /home/wj/Downloads/rovio_workspace/src/rovio/launch/rovio_rviz_config.rviz
总体来说,不如上一种省事,直接运行.launch即可启动rviz。
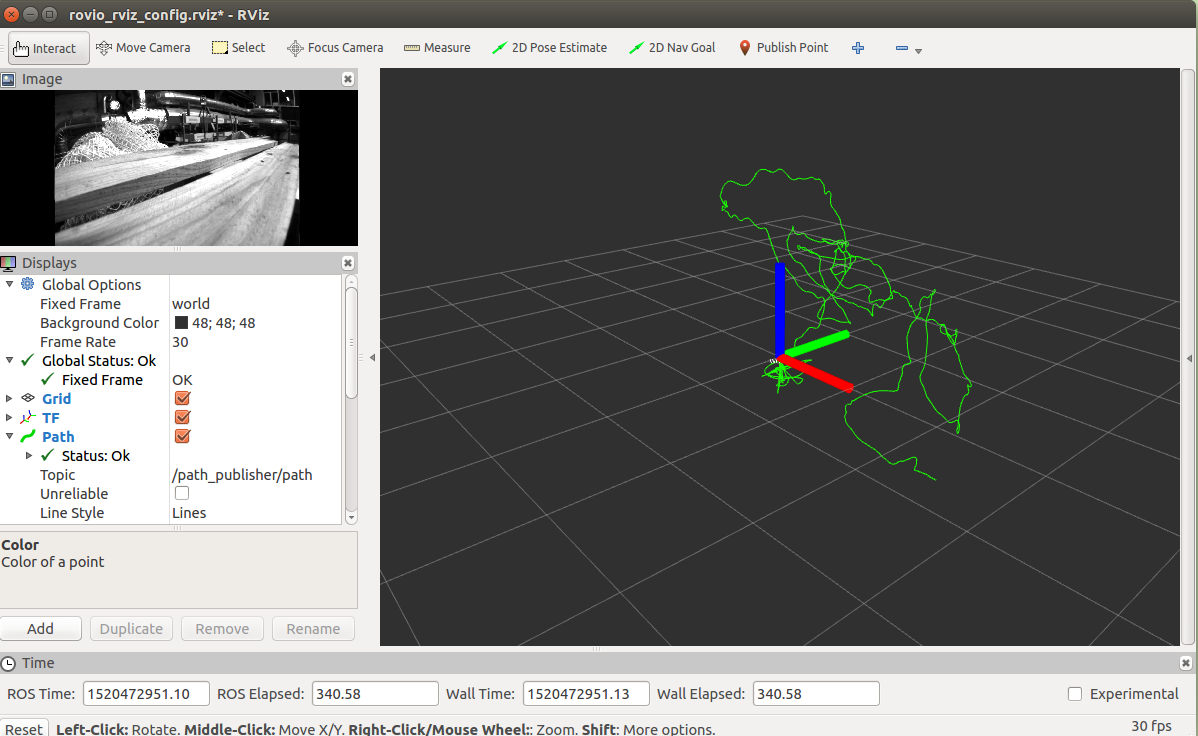
由于其发布的消息并没有路径path,只有/rovio/odometry位姿,所以这一部分需要自己书写---path_publisher
结果图:
补充:安装kindr (https://github.com/ethz-asl/kindr)
[1]Installing from packages (recommended for Ubuntu LTS users)
sudo add-apt-repository ppa:ethz-asl/common #通过发布将项目PPA添加到您的APT来源
sudo apt-get update #重新同步您的包索引文件,更新
sudo apt-get install ros-indigo-kindr-* #安装所有项目包及其依赖关系
[2]Building with cmake
Install the library with CMake:(使用CMake编译)
mkdir build
cd build
cmake ..
sudo make install
Uninstall the library with:(对库进行卸载)
cd build
sudo sudo make uninstall
Kindr can be included in your cmake project. Add the following to your CmakeLists.txt:
find_package(kindr)
include_directories(${kindr_INCLUDE_DIRS})
[2]Building with catkin(使用catkin进行编译)
cd ~/catkin_ws/src
git clone git@github.com:ethz-asl/kindr.git
catkin_make_isolated -C ~/catkin_ws
或用catkin命令行工具 :
cd ~/catkin_ws/src
git clone git@github.com:ethz-asl/kindr.git
catkin build -w ~/catkin_ws kindr
Kindr can be included in your catkin project with: Add the following to your CMakeLists.txt:
find_package(catkin COMPONENTS kindr)
include_directories(${catkin_INCLUDE_DIRS})
And to your package.xml:
<package>
<build_depend>kindr</build_depend>
</package>
[3]Building the documentation构建文档
Build the documentation with Doxygen:
cd kindr/doc/doxygen
mkdir build
cd build
cmake ..
make doc
The doxygen documentation can be found here:
doc/doxygen/doc/html/index.html
[4]Building unit tests with gtest构建单元测试
GTests are only built if the folder gtest exists in the root folder.
仅当文件夹“ gtest”存在于根文件夹中时,才会构建GTests 。
Download and use GTest:
wget http://googletest.googlecode.com/files/gtest-1.7.0.zip
unzip gtest-1.7..zip
ln -s gtest-1.7. gtest
mkdir build
cd build
cmake .. -DBUILD_TEST=true
make
安装运行Rovio的更多相关文章
- 安装运行 rovio odometry
https://github.com/ethz-asl/rovio https://github.com/ethz-asl/kindr 1. 新建catkinworkspace mkdir -p ~/ ...
- Windows OS上安装运行Apache Kafka教程
Windows OS上安装运行Apache Kafka教程 下面是分步指南,教你如何在Windows OS上安装运行Apache Zookeeper和Apache Kafka. 简介 本文讲述了如何在 ...
- 您的 PHP 似乎没有安装运行 WordPress 所必需的 MySQL 扩展”处理方法
转自:http://www.xuebuyuan.com/1549022.html 这已经是一个老掉牙的问题了,部分人使用自己的服务器安装WordPress程序之后,会出现“您的 PHP 似乎没有安装运 ...
- Android中插件开发篇之----动态加载Activity(免安装运行程序)
一.前言 又到周末了,时间过的很快,今天我们来看一下Android中插件开发篇的最后一篇文章的内容:动态加载Activity(免安装运行程序),在上一篇文章中说道了,如何动态加载资源(应用换肤原理解析 ...
- 用JSON-server模拟REST API(一) 安装运行
用JSON-server模拟REST API(一) 安装运行 在开发过程中,前后端不论是否分离,接口多半是滞后于页面开发的.所以建立一个REST风格的API接口,给前端页面提供虚拟的数据,是非常有必要 ...
- Mac 下安装运行Rocket.chat
最近花了一周的时间,复习了HTML.CSS.原生JS,并学习了Node.js.CoffeeScript.js.MongoDB,入了下门. 因为准备在Rocket.chat 上做二次开发,所以先下载和安 ...
- 在Linux上rpm安装运行Redis 3.0.4
http://www.rpmfind.net搜索redis,找到redis3.0.4的rpm源选做 wget ftp://fr2.rpmfind.net/linux/remi/enterprise/6 ...
- Linux通过docker安装运行酷Q--用QQ骰子君进行跑团
Linux通过docker安装运行酷Q 文:铁乐与猫 需求:和小伙伴周末进行愉快的TRPG跑团,需要在QQ讨论组上加了qq小号后,将qq小号用酷Q配合投骰的应用变成骰子君. 限制:我个人的云计算服务器 ...
- Activity工作流(2)-入门安装运行第一个例子
转: Activity工作流(2)-入门安装运行第一个例子 置顶 2017年05月24日 15:58:50 li_ch_ch 阅读数:24432 版权声明:本文为博主原创文章,未经博主允许不得转载 ...
随机推荐
- 给iOS开发新手送点福利,简述UIPikerView的属性和用法
1. numberOfComponents:返回UIPickerView当前的列数 NSInteger num = _pickerView.numberOfComponents; NSLog( @ ...
- Solr学习之二-Solr基础知识
一 基本说明 简单来说Solr是基于Lucene的高性能的,开源的Java企业搜索服务器.Solr可以看作一个Web app,运行在tomcat或Jetty这类HTTP服务器上, 底层是一个基于Luc ...
- Web 跨域请求
在前端开发过程中,难免和服务端产生数据交互.一般情况我们的请求分为这么几种情况: 1. 只关注发送,不关注接收 2.不仅要发送,还要关注服务端返回的信息 a. 同域请求 ...
- python入门-列表
列表使用[]来标识 列表和PHP中的数组类似 包括使用和访问方式都是类似 可以用下标索引的方式直接访问 来几个例子,这样看起来才舒服 names = ['baker','pitty','david', ...
- 关于BeautifulSoup类中的tag对象的string和text属性
<dl> <dt> 今开 </dt><dd class="s-down">3.87</dd> </dl> & ...
- MySQL优化order by导致的 using filesort
using filesort 一般出现在 使用了 order by 语句当中. using filesort不一定引起mysql的性能问题.但是如果查询次数非常多,那么每次在mysql中进行排序,还是 ...
- VBox 安装 macOS 10.12
安装步骤⑴ 下载及解压 macOS 10.12 Sierra Final by TechReviews.rar ⑵ 下载及双击安装 VirtualBox-5.1.6-110634-Win.exe ,默 ...
- mysql insert on duplicate key, update, ignore
insert 语句中不能使用where,所以如果需要根据插入的数据在已有的数据库表是否重复做一些操作可以使用下面三种方法: 1. 使用insert,捕获duplicate错误 2. insert in ...
- JSP页面实现自动跳转
1 <html><head><script language=javascript> function out(obj) { var i = obj; if ( ...
- 【341】Numpy 相关应用
Numpy_01 >>> from numpy import pi >>> np.linspace(0, 2, 9) array([0. , 0.25, 0.5 , ...