文献阅读报告 - Situation-Aware Pedestrian Trajectory Prediction with Spatio-Temporal Attention Model
目录
概览
描述:模型基于LSTM神经网络提出新型的Spatio-Temporal Graph(时空图),旨在实现在拥挤的环境下,通过将行人-行人,行人-静态物品两类交互纳入考虑,对行人的轨迹做出预测。
训练与测试数据库
- 数据库:ETH Walking Pedestrian & UCY Students and Zara
- 数据:请参见https://www.cnblogs.com/sinoyou/p/11227348.html
QUESTION
数据库ETH和UCY中均只提供行人的轨迹坐标信息,未提供静态物体的坐标和分类方式,有关Obstacle的数据来源未知。
评价指标与评价结果
ADE(Average Displacement Error) - 计算出每位行人整个轨迹偏差的均值,再对所有行人取平均。
ADE = \[\Sigma^N_{j=1}{\Sigma^n_{i=1}\sqrt{(\hat x_i^j - x_i^j)^2 + (\hat y_i^j - y_i^j)^2} \over n} \over N\]
FDE(Final Displacement Error)- 计算出每位行人轨迹重点的偏差,再对所有行人取平均。
FDE = \[\Sigma^N_{j=1}{\sqrt{(\hat x_n^j - x_n^j)^2 + (\hat y_n^j - y_n^j)^2}} \over N\]
评价结果:
- 对比其他Graph-based baselines:S-RNN、Social Attention等,H-H和H-H-O模型的平均测试结果能够减少最大为55%的ADE和61%的FDE。
- 对比Social LSTM和SGAN等其他模型,有以下重大提升:
- 在静止物体较多的数据集(如Hotel和UCY)中,H-H-O模型在FDE错误率上最高降低93%。
- 在人群密集处如入口(ETH)中,人群避免碰撞的情况常发生,H-H-O在FDE错误率上最高降低89%。
- 相比于其他模型,此模型更适合预测Finial Step,而不是Entire Step。
模型
本文在此将基于基于图的神经网络资料阅读整理的已有内容着重强调新模型运用Attention机制在原有SRNN模型基础上做出的改进,其他基础型内容请参见链接。
Spatio-Temporal Graph
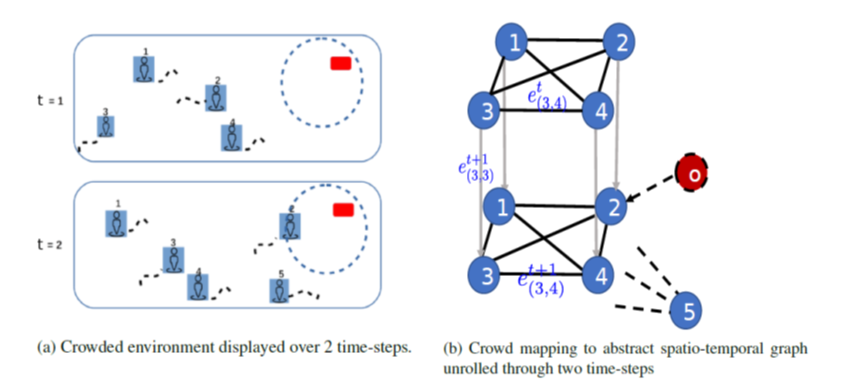
模型中的时空图有两类点和三类边
- Pedestrian Node:行人点
- Object Node:静态物品点
- Spatial-Edge(两类):同一时刻不同点之间的连边。所有行人之间都连有双向的Spatial-Edge,当行人很靠近Object时,有从Object指向行人的单向Spatial-Edge。
- Temporal-Edge:相邻时刻连接相同行人点的单向边。
边权(edge features)定义
- 不同点之间的边(Spatial-Edge)如\(x_{v_1v_2}\),表示两点之间距离。
- 相同点之间的边(Temporal-Edge)如\(x_{v_1v_1}\),表示该点的位置。
LSTM替换st-graph中的部件
- 将st-graph因式化分解,st-graph的点和边替换为LSTM序列后得到:temporal edgeLSTM, spatial edgeLSTM, nodeLSTM。
- 同SRNN结构,nodeLSTM的输出时每一步预测的最终输出,在每一步运行时会将相邻edgeLSTMs的输出经过注意力机制后作为输入,层级在edgeLSTMs之上。
Edge LSTM
spatial edgeLSTM
对于每条edge都有一个LSTM模型,为了适应后续nodeLSTM处理方式,对于spatial edges将统一处理同一个点为起点的所有spatial edges(以 · 表示)。
\[e^t_{v_2.} = \phi(x_{v_2.}^t;W_s)\] - embedding
\[h^t_{v_2.} = LSTM(h_{v_2.}^{t-1}, e^t_{v_2.}, W_s^{lstm})\] - lstm cell
temporal edgeLSTM
对于每个点都仅有一个temporal edgeLSTM,因此无需批量地处理。
\[e_{v_2v_2} = \phi(x^t_{v_2v_2};W_t)\] - embedding
\[h_{v_2v_2}^t = LSTM(h_{v_2v_2}^{t-1}, e_{v_2v_2}^t, W_t^{lstm})\] - lstm cell
Node LSTM
QUESTION
Obstacle是否仅在建边时与pedestrian存在不同,而使用nodeLSTM等都与pedestrian一致?
假设nodeLSTM的输出满足二维正态分布
同SRNN模型,\(v_2\)的nodeLSTM将用注意力机制整合来自\(v_2\)相邻点之间edgeLSTM输出和\(v_2\)的temporal edgeLSTM输出作为输入的一部分(公式中\(H_{v_2}^t\)就是整合得到),最终基于LSTM的输出是二维正态分布的假设,求出预测的位置或计算损失值(与Social LSTM类似)。
\[\mu_{v_2}^{t+1}, \sigma_{v_2}^{t+1}, \rho_{v_2}^{t+1} = W_{out}h_{v_2}^t\]
\[(x_{v_2}^{t+1}, y_{v_2}^{t+1}) \sim N(\mu_{v_2}^{t+1}, \sigma_{v_2}^{t+1}, \rho_{v_2}^{t+1})\]
根据文章的解释,\(x^t_{v_2}\)和\(x^t_{v_2v_2}\)应该相等,即temporal edgeLSTM和nodeLSTM从st-graph所获取的features应该是一样的。
Node LSTM
\[e_{v_2}^t = \phi(x_{v_2}^t; W_{embed}) \] - embedding
\[h_{v_2}^t = LSTM(e_{v_2}^t, concat(h_{v_2}^t, H_{v_2}^t, e_{v2}^t), W^{lstm})\] - lstm cell
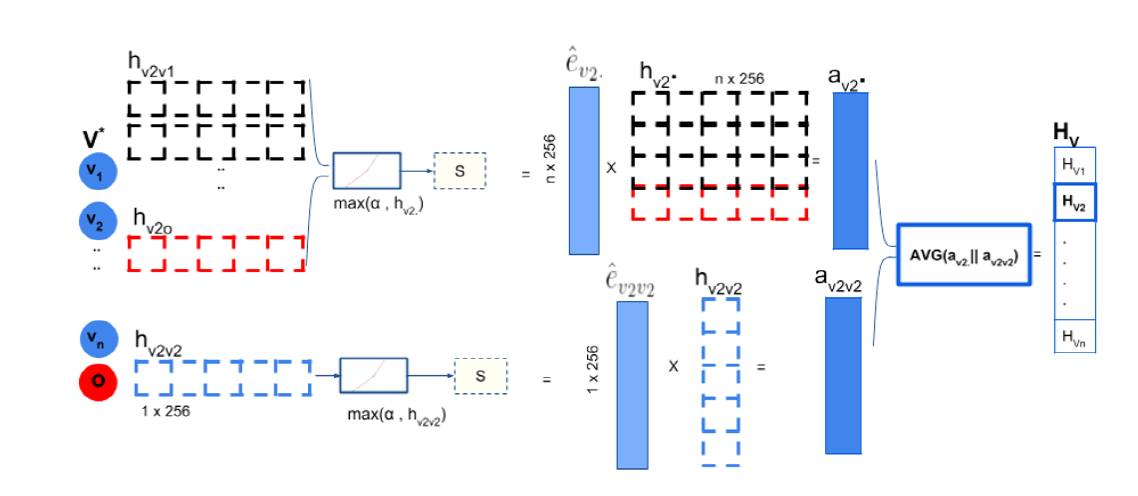
\(H_{v_2}^t\)的运算
文献中对于\(H_{v_2}\)的计算方式已经通过图示展现的很清晰明显了,大体就是将来自spatial edgeLSTM和temporal edgeLSTM的输出\(h_{v_2.}^t,h_{v_2v_2}^t\)经过PRelu和softmax得到的归一化\(\hat e_{v_2.}\),与源数据作乘法得到注意力权重\(a_{v_2}^t\),将这些权重累加并取平局即得到加权平均的隐藏状态\(H_{v_2}\)。
QUESTION
该文献与其他文献对于注意力权重的称呼有所不同,其他参考文献中将经过softmax归一化的数据称作注意力权重(coefficient),即\(\hat e_{v_2}\),将\(a_{v_2}.\)称作加权结果,但该文献中将\(a_{v_2}.\)称作注意力权重,权重之和再平均就是加权的隐藏状态。
模型在求得\(H_{v_2}\)使用的正是注意力机制,在借鉴了multi-head attention机制后改进出multi-node attention机制,有以下几个要点:
- 引入了PReLU函数,相比于常规Relu有一个可训练的参数P,以便让负值隐藏值有细微跨度差异,实验证明对效果有提升。
- multi-node vs multi-head:相较于multi-head attention,模型提出的注意力模型没有使用scale dot-product操作,而是用累加和平均的方式,也就没有大幅压缩向量维度,保留信息更充分。
文献阅读报告 - Situation-Aware Pedestrian Trajectory Prediction with Spatio-Temporal Attention Model的更多相关文章
- 文献阅读报告 - Social LSTM:Human Trajectory Prediction in Crowded Spaces
概览 简述 文献所提出的模型旨在解决交通中行人的轨迹预测(pedestrian trajectory prediction)问题,特别是在拥挤环境中--人与人交互(interaction)行为常有发生 ...
- 文献阅读报告 - 3DOF Pedestrian Trajectory Prediction
文献 Sun L , Yan Z , Mellado S M , et al. 3DOF Pedestrian Trajectory Prediction Learned from Long-Term ...
- 文献及代码阅读报告 - SS-LSTM:A Hierarchical LSTM Model for Pedestrian Trajectory Prediction
概览 简述 SS-LSTM全称Social-Scene-LSTM,是一种分层的LSTM模型,在已有的考虑相邻路人之间影响的Social-LSTM模型之上额外增加考虑了行人背景的因素.SS-LSTM架构 ...
- 文献阅读报告 - Pedestrian Trajectory Prediction With Learning-based Approaches A Comparative Study
概述 本文献是一篇文献综述,以自动驾驶载具对外围物体行动轨迹的预测为切入点,介绍了基于运动学(kinematics-based)和基于机器学习(learning-based)的两大类预测方法. 并选择 ...
- 文献阅读报告 - Social Ways: Learning Multi-Modal Distributions of Pedestrian Trajectories with GANs
文献引用 Amirian J, Hayet J B, Pettre J. Social Ways: Learning Multi-Modal Distributions of Pedestrian T ...
- 文献阅读报告 - Context-Based Cyclist Path Prediction using RNN
原文引用 Pool, Ewoud & Kooij, Julian & Gavrila, Dariu. (2019). Context-based cyclist path predic ...
- 文献阅读报告 - Social BiGAT + Cycle GAN
原文文献 Social BiGAT : Kosaraju V, Sadeghian A, Martín-Martín R, et al. Social-BiGAT: Multimodal Trajec ...
- 文献阅读报告 - Move, Attend and Predict
Citation Al-Molegi A , Martínez-Ballesté, Antoni, Jabreel M . Move, Attend and Predict: An Attention ...
- 文献阅读报告 - Social GAN: Socially Acceptable Trajectories with Generative Adversarial Networks
paper:Gupta A , Johnson J , Fei-Fei L , et al. Social GAN: Socially Acceptable Trajectories with Gen ...
随机推荐
- 0106 springMVC REST风格
markdown 印象笔记语法练习带快捷键的 加粗 快捷键 cmd+b 斜体 cmd+i 分割线 cmd+u 编号列表: cmd+shift+o 无编号列表 cmd+shift+u 待办事项 cmd+ ...
- python反序列化漏洞
原理在网页源码中如果出现将用户输入数据进行反序列化当成参数输出时,出现漏洞,可造成任意命令执行例如网页源码try: become = self.get_argument('become') ...
- 记号一下用iptables做的端口转发
iptables -t nat -I PREROUTING -p tcp -m tcp --dport 83 -j DNAT --to-destination 192.168.1.55:443ipta ...
- UVA - 10305 Ordering Tasks(拓扑排序)
题意:给定优先关系进行拓扑排序. 分析:将入度为0的点加入优先队列,并将与之相连的点入度减1,若又有度数为0的点,继续加入优先队列,依次类推. #pragma comment(linker, &quo ...
- Rails 第一课:环境配置 Ruby Rails RVM Heroku
安装 上传专案到 Heroku 安装 Ruby 2.3.1 Rails 5.0.0.1 RVM 1.27.0 比较幸运一个问题都未碰到 MacOS 10.12.1 配置完成系统顺利升级到10.12.2 ...
- 指令——mv
一个完整的指令的标准格式: Linux通用的格式——#指令主体(空格) [选项](空格) [操作对象] 一个指令可以包含多个选项,操作对象也可以是多个. 指令:mv (move,移动,剪切) 作用 ...
- 在各浏览器和各分辨率下如何让div内的table垂直水平居中?
本文主要针对需要全屏显示的系统页面内,因为系统经常会用到表格table布局,偶尔的table需要显示在div的正中间,所以鄙人特此总结下div内table的万千姿态. <!DOCTYPE htm ...
- 使用docker快速体验kali linux
环境 运行在 64位 机器 企业版的 win10 系统 下载镜像 首先搜索docker download 去官网下载docker:https://www.docker.com/products/doc ...
- oracle函数创建与调用
函数的定义: CREATE OR REPLACE FUNCTION FUNCTION_TEST(PARAMER1 IN VARCHAR, -- 参数的类型不写长度 PARAMER2 OUT VARCH ...
- 【pwnable.kr】leg
pwnable从入门到放弃第八题. Download : http://pwnable.kr/bin/leg.cDownload : http://pwnable.kr/bin/leg.asm ssh ...