Ros学习——Python发布器publisher和订阅器subscriber
1.编写发布器
- 初始化 ROS 系统
在 ROS 网络内广播我们将要在 chatter 话题上发布 std_msgs/String 类型的消息
- 以每秒 10 次的频率在 chatter 上发布消息
在 beginner_tutorials package 里创建 script/talker.py 文件:
#!/usr/bin/env python
# license removed for brevity
import rospy
from std_msgs.msg import String def talker():
pub = rospy.Publisher('chatter', String, queue_size=10)
rospy.init_node('talker', anonymous=True)
rate = rospy.Rate(10) # 10hz
while not rospy.is_shutdown():
hello_str = "hello world %s" % rospy.get_time()
rospy.loginfo(hello_str)
pub.publish(hello_str)
rate.sleep() if __name__ == '__main__':
try:
talker()
except rospy.ROSInterruptException:
pass
赋予文件执行权限:
$ chmod +x listener.py
2.编写订阅器
- 初始化ROS系统
订阅 chatter 话题
- 进入自循环,等待消息的到达
当消息到达,调用 chatterCallback() 函数
在 beginner_tutorials 目录下创建 script/listener.py 文件:
#!/usr/bin/env python
import rospy
from std_msgs.msg import String def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data) def listener(): # In ROS, nodes are uniquely named. If two nodes with the same
# node are launched, the previous one is kicked off. The
# anonymous=True flag means that rospy will choose a unique
# name for our 'listener' node so that multiple listeners can
# run simultaneously.
rospy.init_node('listener', anonymous=True) rospy.Subscriber("chatter", String, callback) # spin() simply keeps python from exiting until this node is stopped
rospy.spin() if __name__ == '__main__':
listener()
赋予文件执行权限:
$ chmod +x listener.py
3.编译
- 在catkin_ws目录下运行 catkin_make
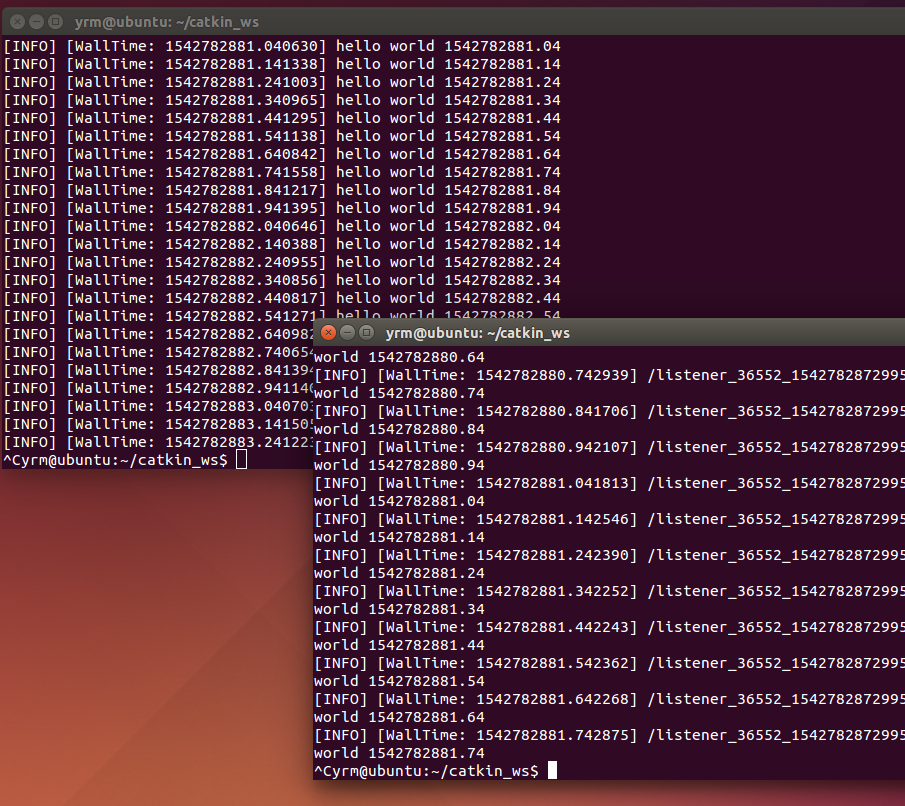
4.测试结果:
Ros学习——Python发布器publisher和订阅器subscriber的更多相关文章
- Ros学习——C++发布器publisher和订阅器subscriber
1.编写发布器 初始化 ROS 系统 在 ROS 网络内广播我们将要在 chatter 话题上发布 std_msgs/String 类型的消息 以每秒 10 次的频率在 chatter 上发布消息 在 ...
- ROS学习笔记10-写一个简单的订阅者和发布者(C++版本)
本文档来源于:http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29 写发布者节点如前所述,节点是连接到RO ...
- ROS学习(七)—— 理解ROS Topic
一.准备工作 1.打开roscore roscore 2.turtlesim 打开一个turtulesim节点 rosrun turtlesim turtlesim_node 3.turtle key ...
- ROS学习(十二)—— 编写简单的消息发布器和订阅器(C++)
一.创建发布器节点 1 节点功能: 不断的在ROS网络中广播消息 2 创建节点 (1)打开工作空间目录 cd ~/catkin_ws/src/beginner_tutorials 创建一个发布器节点( ...
- ROS 消息发布器和订阅器Publisher, Subscriber
博客参考:https://www.2cto.com/kf/201705/639776.html 1.编写发布器节点节点(Node) 是指 ROS 网络中可执行文件.接下来,将会创建一个发布器节点(“t ...
- SLAM+语音机器人DIY系列:(二)ROS入门——5.编写简单的消息发布器和订阅器
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS:消息发布器和订阅器(c++)
学习资料主要源自http://wiki.ros.org/ROS/Tutorials/WritingPublisherSubscriber%28c%2B%2B%29 $ roscd beginner_t ...
- [转]RoboWare Studio的使用和发布器/订阅器的编写与测试
原文地址:https://blog.csdn.net/han_l/article/details/77772352,转载主要方便随时查阅,如有版权要求,请及时联系. 开始ROS学习之前,先按照官网教程 ...
- ROS笔记——创建简单的主题发布节点和主题订阅节点
在安装好ROS后,接着学习如何创建节点和节点之间的通信方式,以一个简单的主题发布节点和主题订阅节点说明. 节点是连接ROS网络等可执行文件,是实现某些功能的软件包,也是一个主要计算执行的进程. 一.创 ...
随机推荐
- LSM树——LSM 将B+树等结构昂贵的随机IO变的更快,而代价就是读操作要处理大量的索引文件(sstable)而不是一个,另外还是一些IO被合并操作消耗。
Basic Compaction 为了保持LSM的读操作相对较快,维护并减少sstable文件的个数是很重要的,所以让我们更深入的看一下合并操作.这个过程有一点儿像一般垃圾回收算法. 当一定数量的ss ...
- Eclipse集成c与c++
1.eclipse 开普勒版本 2.安装mingw 3.配置环境变量mingw的 path 加入;C:\MinGW\bin 4.eclipse 中的市场搜索 CDT
- Nodejs调试技术总结
调试技术与开发技术构成了软件开发的基石.目前Nodejs作为新型的Web Server开发栈倍受开发者关注.总的来说Nodejs的应用程序主要有两部分:JavaScript编写的js模块和C语言编译的 ...
- java学习笔记 --- IO(2)
IO流的分类: 流向: 输入流 读取数据 输出流 写出数据 数据类型: 字节流 字节输入流 读取数据 InputStream 字节输出流 写出数据 OutputStream 字符流 字符 ...
- Ajax与后台的交互
Ajax Java 交互 jsp代码 <%@ page language="java" import="java.util.*" pageEncoding ...
- 通过 objc_setAssociatedObject alert 和 button关联 及传值
原文地址 http://blog.csdn.net/lengshengren/article/details/16886915 //唯一静态变量key static const char associ ...
- linux下配置cvs服务器以及cvs常用命令
.查看系统是否安装有cvs #cat /etc/services | grep cvspserver 看看是否有: cvspserver /tcp #CVS client/server operati ...
- poj2374 Fence Obstacle Course[线段树+DP]
https://vjudge.net/problem/POJ-2374 吐槽.在这题上面磕了许久..英文不好题面读错了qwq,写了个错的算法搞了很久..A掉之后瞥了一眼众多julao题解,**,怎么想 ...
- linux 内核移植和根文件系统的制作【转载】
原文地址:http://www.cnblogs.com/hnrainll/archive/2011/06/09/2076214.html 1.1 Linux内核基础知识 在动手进行Linux内核移植之 ...
- Oracle查询数据表结构(字段,类型,大小,备注)
作用:想要生成整个Oracle数据库所有表结构WORD文档(数据库设计说明书) Oracle数据库字典介绍 Oracle数据字典是有表和视图组成的,存储有关数据库结构信息的一些数据库对象.数据库 ...