ROS中的3D机器人建模(二)
一,创建我们的第一个URDF模型
我们设计的第一个机器人模型是pan-and-tilt机械结构,代码如下
pan_tilt.urdf:
1 <?xml version="1.0"?>
2 <robot name="pan_tilt">
3
4 <link name="base_link">
5
6 <visual>
7 <geometry>
8 <cylinder length="0.01" radius="0.2"/>
9 </geometry>
10 <origin rpy="0 0 0" xyz="0 0 0"/>
11 <material name="yellow">
12 <color rgba="1 1 0 1"/>
13 </material>
14 </visual>
15
16 <collision>
17 <geometry>
18 <cylinder length="0.03" radius="0.2"/>
19 </geometry>
20 <origin rpy="0 0 0" xyz="0 0 0"/>
21 </collision>
22 <inertial>
23 <mass value="1"/>
24 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
25 </inertial>
26 </link>
27
28 <joint name="pan_joint" type="revolute">
29 <parent link="base_link"/>
30 <child link="pan_link"/>
31 <origin xyz="0 0 0.1"/>
32 <axis xyz="0 0 1" />
33 <limit effort="300" velocity="0.1" lower="-3.14" upper="3.14"/>
34 <dynamics damping="50" friction="1"/>
35 </joint>
36
37 <link name="pan_link">
38 <visual>
39 <geometry>
40 <cylinder length="0.4" radius="0.04"/>
41 </geometry>
42 <origin rpy="0 0 0" xyz="0 0 0.09"/>
43 <material name="red">
44 <color rgba="0 0 1 1"/>
45 </material>
46 </visual>
47 <collision>
48 <geometry>
49 <cylinder length="0.4" radius="0.06"/>
50 </geometry>
51 <origin rpy="0 0 0" xyz="0 0 0.09"/>
52 </collision>
53 <inertial>
54 <mass value="1"/>
55 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
56 </inertial>
57 </link>
58
59 <joint name="tilt_joint" type="revolute">
60 <parent link="pan_link"/>
61 <child link="tilt_link"/>
62 <origin xyz="0 0 0.2"/>
63 <axis xyz="0 1 0" />
64 <limit effort="300" velocity="0.1" lower="-4.64" upper="-1.5"/>
65 <dynamics damping="50" friction="1"/>
66 </joint>
67
68 <link name="tilt_link">
69 <visual>
70 <geometry>
71 <cylinder length="0.4" radius="0.04"/>
72 </geometry>
73 <origin rpy="0 1.5 0" xyz="0 0 0"/>
74 <material name="green">
75 <color rgba="1 0 0 1"/>
76 </material>
77 </visual>
78 <collision>
79 <geometry>
80 <cylinder length="0.4" radius="0.06"/>
81 </geometry>
82 <origin rpy="0 1.5 0" xyz="0 0 0"/>
83 </collision>
84 <inertial>
85 <mass value="1"/>
86 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
87 </inertial>
88
89 </link>
90
91
92 </robot>
详解URDF文件
<?xml version= "1.0"?>
<robot name = "pan_tilt">
<robot>标签定义了我们将要创建的机器人的名称。在这里,我们将机器人命名为pan_tilt.
如果我们查看<robot>标签定义之后的部分,我们可以看到pan-and-tilt机器结构中连杆和关节的定义:
<link name ="base_link">
<visual>
<geometry>
<cylinder length= "0.01" radius = "0.2"/>
</geometry>
<origin rpy= "0 0 0" xyz="0 0 0"/>
<material name = "yellow">
<color rgba>="1 1 0 1"/>
</material>
</visual>
</link>
前面的这段代码是pan-and-tilt机械结构的base_link的定义。<visual>标签描述了连杆的可见外观,它将在机器人仿真中显示出来。我们就可以用这个标签来定义连杆的几何形状(圆柱、立方体、球体、网络模型)以及连杆的材质(颜色和纹理)。
<joint name="pan_joint " type ="revolute">
<parent link = "base_link"/>
<child link="pan_link"/>
<origin xyz="0 0 0.1"/>
<axis xyz ="0 0 1"/>
</joint>
在前面的代码片段中,我们定义了一个具有唯一名称和关节类型的关节。在这里我们使用的关节类型是旋转关节(revolute),父连杆和子连杆分别是base_link和pan_link。在此标签内还指定了关节原点。
然后检查urdf是否包含错误,命令如下:
$ check_urdf pan_tilt.urdf
check_urdf命令将解析urdf标签并显示错误(如果有的话),如果一切正常,他将输出如下内容:
robot name is: pan_tilt
---------- Successfully Parsed XML ---------------
root Link: base_link has 1 child(ren)
child(1): pan_link
child(1): tilt_link
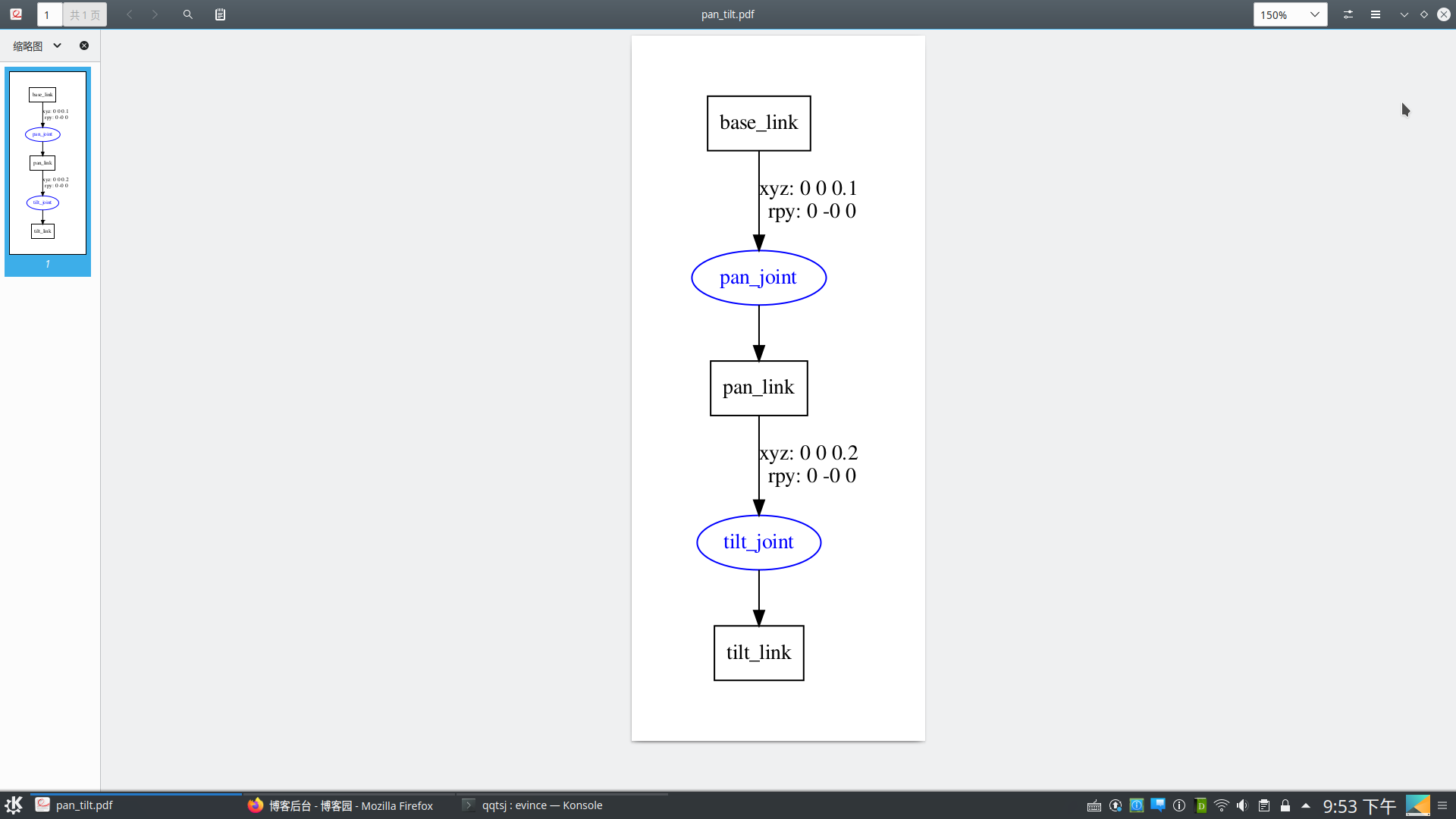
如果我们想以图形化的方式查看机器人连杆和关节的结构,我们可以使用一个名为urdf_to_graphiz的命令行工具:
$ urdf_to_graphiz pan_tilt.urdf
这个命令将生成两个文件:pan_tilt.gv和pan_tilt.pdf.
我们可以使用以下命令来查看此机器人的结构:
$ evince pan_tilt.pdf
如图所示:
二,在RViz中可视化机器人3D模型
设计好URDF后,可以在RViz上查看它。我们可以创建一个view_demo.launch启动文件,代码如下:
1 <launch>
2 <arg name="model" />
3 <param name="robot_description" textfile="$(find mastering_ros_robot_desc ription_pkg)/urdf/pan_tilt.urdf" />
4 <param name="use_gui" value="true"/>
5
6 <node name="joint_state_publisher" pkg="joint_state_publisher" type="join t_state_publisher" />
7 <node name="robot_state_publisher" pkg="robot_state_publisher" type="stat e_publisher" />
8 <node name="rviz" pkg="rviz" type="rviz" args="-d $(find mastering_ros_ro bot_description_pkg)/urdf.rviz" required="true" />
9
10 </launch>
11
我们使用如下命令来启动模型:
$ roslaunch mastering_ros_robot_description_pkg view_demo.launch
如果一切正常,我们将在RViz中看到这个pan-and-tilt机械结构,如图所示

ROS中的3D机器人建模(二)的更多相关文章
- ROS中的3D建模机器人(三)
一.利用xacro理解机器人建模 当我们创建复杂的机器人模型时,URDF的灵活性将会降低,URDF缺少的主要特性是简单的.可重用性,模块化和可编程性. URDF是一个单独的文件我们不能在它里面包含其他 ...
- ROS中3D机器人建模(五)
一.创建一个差速驱动移动机器人模型 前面我们已经创建了一个7-DOF机械臂机器人模型,接下来我们将创建一个差速机器人模型,差速轮式机器人在机器人底盘的两端安装两个轮子, 整个底盘由一个或两个脚轮支撑. ...
- ROS中3D机器人建模(四)
一.创建一个7-DOF机械臂机器人 创建一个名为seven_dof_arm.xacro的文件,写入相应的代码,其关节名称如下: bottom_joint shoulder_pan_joint shou ...
- ROS中3D机器人建模(一)
一,机器人建模的ROS软件包 *urdf : 机器人建模最重要的ros软件包是urdf软件包.这个软件包包含一个用于统一机器人描述格式(URDF)的C++解析器,它是一个表示机器人模型的XML文件,还 ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- ROS和Gazebo进行机器人仿真(二)
一.在Gazebo中使用ROS控制器 在本节中,我们将讨论如何在Gazebo中让机器人的每个关节运动. 为了让关节动起来,我们需要分配一个ROS控制器,尤其是,我们需要为每个关节连上一个与transm ...
- ROS和Gazebo进行机器人仿真(一)
Gazebo是一种多机器人仿真器,可用于室内外机器人仿真.Gazebo在ROS中有良好的接口,包含ROS和Gazebo的所有控制. 若要实现ROS到Gazebo的通信,我们必须安装ROS-Gazebo ...
- ROS中发布激光扫描消息
激光雷达工作时会先在当前位置发出激光并接收反射光束,解析得到距离信息,而后激光发射器会转过一个角度分辨率对应的角度再次重复这个过程.限于物理及机械方面的限制,激光雷达通常会有一部分“盲区”.使用激光雷 ...
随机推荐
- $Noip2011/Luogu1315$ 观光公交 贪心
$Luogu$ $Sol$ 觉得这题贪心要想很多事情,不适合我这种没脑子选手$ovo$.看题解还理解了很久. 最开始是这样想的:把所有的路段上的乘客按大小排个序用加速器就好了,这个想法被自己轻松$ha ...
- Jenkins+ant+jmeter环境搭建
下载的工具版本: apache-jmeter-3.0 apache-ant-1.8.4 jenkins-2.46.3 之前用jmeter写了测试接口的脚本,运行及返回结果都正常,所以需要做的就是工具的 ...
- Math&Random&ThreadLocalRandom类
Math类 //绝对值值运算: Math.abs(18.999); //返回19.999这个数的绝对值 Math.abs(-12.58); // 返回-12.58这个数的绝对值,为12.58 //取值 ...
- leetcode腾讯精选练习之两数相加
两数相加 题目: 给出两个非空的链表用来表示两个非负的整数.其中,它们各自的位数是按照逆序的方式存储的,并且它们的每个节点只能存储一位数字.如果,我们将这两个数相加起来,则会返回一个新的链表来表示它们 ...
- ABA问题怎么解:AtomicStampedReference和AtomicMarkableReference
本博客系列是学习并发编程过程中的记录总结.由于文章比较多,写的时间也比较散,所以我整理了个目录贴(传送门),方便查阅. 并发编程系列博客传送门 并发编程的基石--CAS机制这篇文章中介绍到CAS机制有 ...
- 做前端的你还没用这些软件?? out 啦
1. 编辑器 写代码只是生产软件过程中的一环.无论是数据结构.编译原理.操作系统还是组成原理都是编码的重要基础,试问没有学过编译原理的人能够针对性地进行编译优化吗?不懂操作系统的人能玩得转linux吗 ...
- 正则表达式grep命令
grep命令 作用:文本搜索工具,根据用户指定的“模式”对目标文本逐行进行匹配检查:打印匹配到的行. 模式::由正则表达式字符及文本字符所编写的过滤条件 语法:grep [OPTIONS] PATTE ...
- 使用gravatar生成头像
avatar代表您在线的图像,当你与网站互动时,你的名字旁边会出现一张图片. Gravatar是一个全球通用的头像.你只需上传一次并创建自己的个人资料,然后当你加入任何支持Gravatar的网站时,你 ...
- 【C_Language】---常用C语言控制台函数总结(持续更新)
写了这么久的C程序,每次看到输出的结果都是从上往下排列的黑白框,有没有感觉很无聊啊?今天再次总结一个常用的控制台函数,能够帮助你做好一个好看的界面. 1.设置光标位置代码如下: int main(vo ...
- 《C# 爬虫 破境之道》:第一境 爬虫原理 — 第六节:第一境尾声
在第一境中,我们主要了解了爬虫的一些基本原理,说原理也行,说基础知识也罢,结果就是已经知道一个小爬虫是如何诞生的了~那么现在,请默默回想一下,在第一境中,您都掌握了哪些内容?哪些还比较模糊?如果还有什 ...