ROS中3D机器人建模(五)
一.创建一个差速驱动移动机器人模型
前面我们已经创建了一个7-DOF机械臂机器人模型,接下来我们将创建一个差速机器人模型,差速轮式机器人在机器人底盘的两端安装两个轮子,
整个底盘由一个或两个脚轮支撑。轮子将通过调节速度来控制机器人的移动速度,如果两个马达以相同的速度运行,轮子会向前或者向后移动。
如果一个轮子的速度比另一个轮子慢,机器人就会偏向低速的那一边。
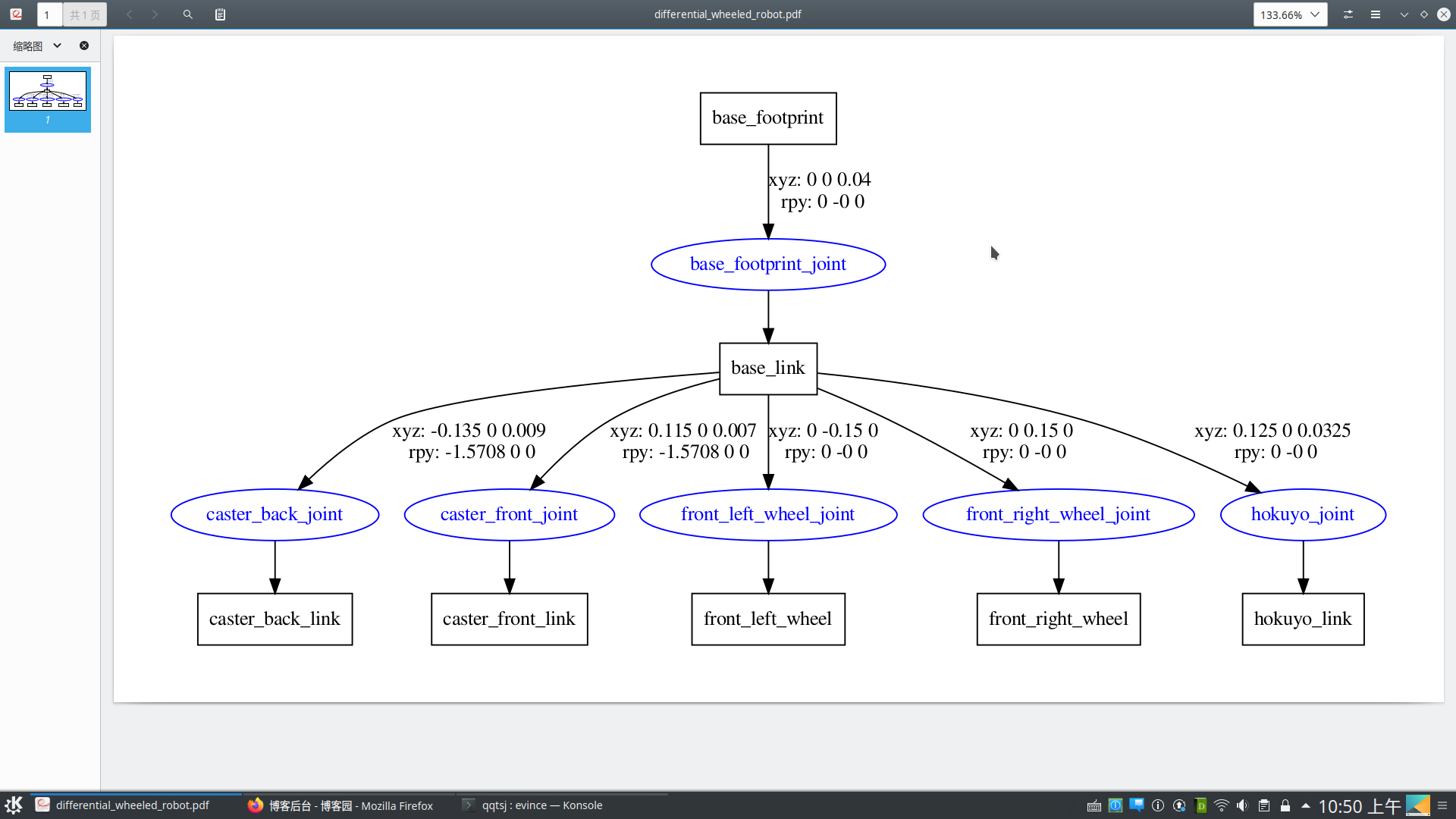
差速机器人由5个关节和5个连杆,两个主要的关节将轮子连接到机器人上。其余3个是固定关节,2个用于经支撑脚轮连接到机器人主体上,1个
用于将底盘连接到机器人主体上。
差速机器人的连杆与关节连接图如下:
接下来我们来解析差速机器人的代码,文件为:diff_wheeled_robot.xacro
机器人被命名为differential_wheeled_robot,还包含一个名为wheel.urdf.xacro的URDF文件。xacro文件包含轮子的定义及其传动方式。
如果我们使用该xacro文件,就可以避免为两个轮子写两套定义,因为两个轮子在形状和大小上是相同的,我们采用xacro的定义:
1 <?xml version="1.0"?>
2 <robot name="differential_wheeled_robot" xmlns:xacro="http://ros.org/wiki/ xacro">
3
4 <xacro:include filename="$(find mastering_ros_robot_description_pkg)/urd f/wheel.urdf.xacro" />
轮子的定义在wheel.urdf.xacro中给出。我们可以指定轮子是否必须放在左边、右边、前面或后面。使用这个宏,我们最多可以创建4个轮子,但目前我们只需要两个:
19 <xacro:macro name="wheel" params="fb lr parent translateX translateY flipY"> <!-- fb : front, back ; lr: left, right -->
20 <link name="${fb}_${lr}_wheel">
我们还指定了仿真所需的Gazebo参数。这里提到的是与轮子相关的Gazebo参数。我们可以用gazeboreference标签说明摩擦系数和刚度系数:
41 <gazebo reference="${fb}_${lr}_wheel">
42 <mu1 value="1.0"/>
43 <mu2 value="1.0"/>
44 <kp value="10000000.0" />
45 <kd value="1.0" />
46 <fdir1 value="1 0 0"/>
47 <material>Gazebo/Grey</material>
48 <turnGravityOff>false</turnGravityOff>
49 </gazebo>
我们为轮子定义的关节是连续转动关节,因为在轮子关节中没有任何限值,这里的parent link是机器人底盘,child link是每个轮子:
51 <joint name="${fb}_${lr}_wheel_joint" type="continuous">
52 <parent link="${parent}"/>
53 <child link="${fb}_${lr}_wheel"/>
54 <origin xyz="${translateX * base_x_origin_to_wheel_origin} ${translateY * bas e_y_origin_to_wheel_origin} ${base_z_origin_to_wheel_origin}" rpy="0 0 0" />
我们还需要设定每个轮子的transmission标签。该轮子的宏定义如下:
60 <!-- Transmission is important to link the joints and the controller -->
61 <transmission name="${fb}_${lr}_wheel_joint_trans">
62 <type>transmission_interface/SimpleTransmission</type>
63 <joint name="${fb}_${lr}_wheel_joint" />
64 <actuator name="${fb}_${lr}_wheel_joint_motor">
65 <hardwareInterface>EffortJointInterface</hardwareInterface>
66 <mechanicalReduction>1</mechanicalReduction>
67 </actuator>
68 </transmission>
69
70 </xacro:macro>
71 </robot>
在diff_wheeled_robot.xacro中,我们可以用以下命令来使用wheel.urdf.xacro中定义的宏:
241 <wheel fb="front" lr="right" parent="base_link" translateX="0" translateY="0.5" flipY="1"/>
242 <wheel fb="front" lr="left" parent="base_link" translateX="0" translateY="-0.5" flipY="1"/>
使用前面的几行代码,我们定义了机器人底盘的左侧和右侧的轮子。机器人底盘是圆柱形的。
下面给出了惯性计算的宏定义,xacro代码段将使用圆柱的质量、半径和高度来计算惯性张量,代码如下:
72 <!-- Macro for calculating inertia of cylinder -->
73 <xacro:macro name="cylinder_inertia" params="m r h">
74 <inertia ixx="${m*(3*r*r+h*h)/12}" ixy = "0" ixz = "0"
75 iyy="${m*(3*r*r+h*h)/12}" iyz = "0"
76 izz="${m*r*r/2}" />
77 </xacro:macro>
下面给出了启动文件的定义,可用于在RViz中显示该机器人模型。启动文件命名为view_mobile_robot.launch:
1 <launch>
2 <arg name="model" />
3 <!-- Parsing xacro and setting robot_description parameter -->
4 <param name="robot_description" command="$(find xacro)/xacro --inorder $(find m astering_ros_robot_description_pkg)/urdf/diff_wheeled_robot.xacro" />
5 <!-- Setting gui parameter to true for display joint slider -->
6 <param name="use_gui" value="true"/>
7 <!-- Starting Joint state publisher node which will publish the joint values -- >
8 <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_stat e_publisher" />
9 <!-- Starting robot state publish which will publish tf -->
10 <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publ isher" />
11 <!-- Launch visualization in rviz -->
12 <node name="rviz" pkg="rviz" type="rviz" args="-d $(find mastering_ros_robot_de scription_pkg)/urdf.rviz" required="true" />
13 </launch>
与机械臂URDF文件相比较,唯一区别是名称不同,其他部分都是一样的。
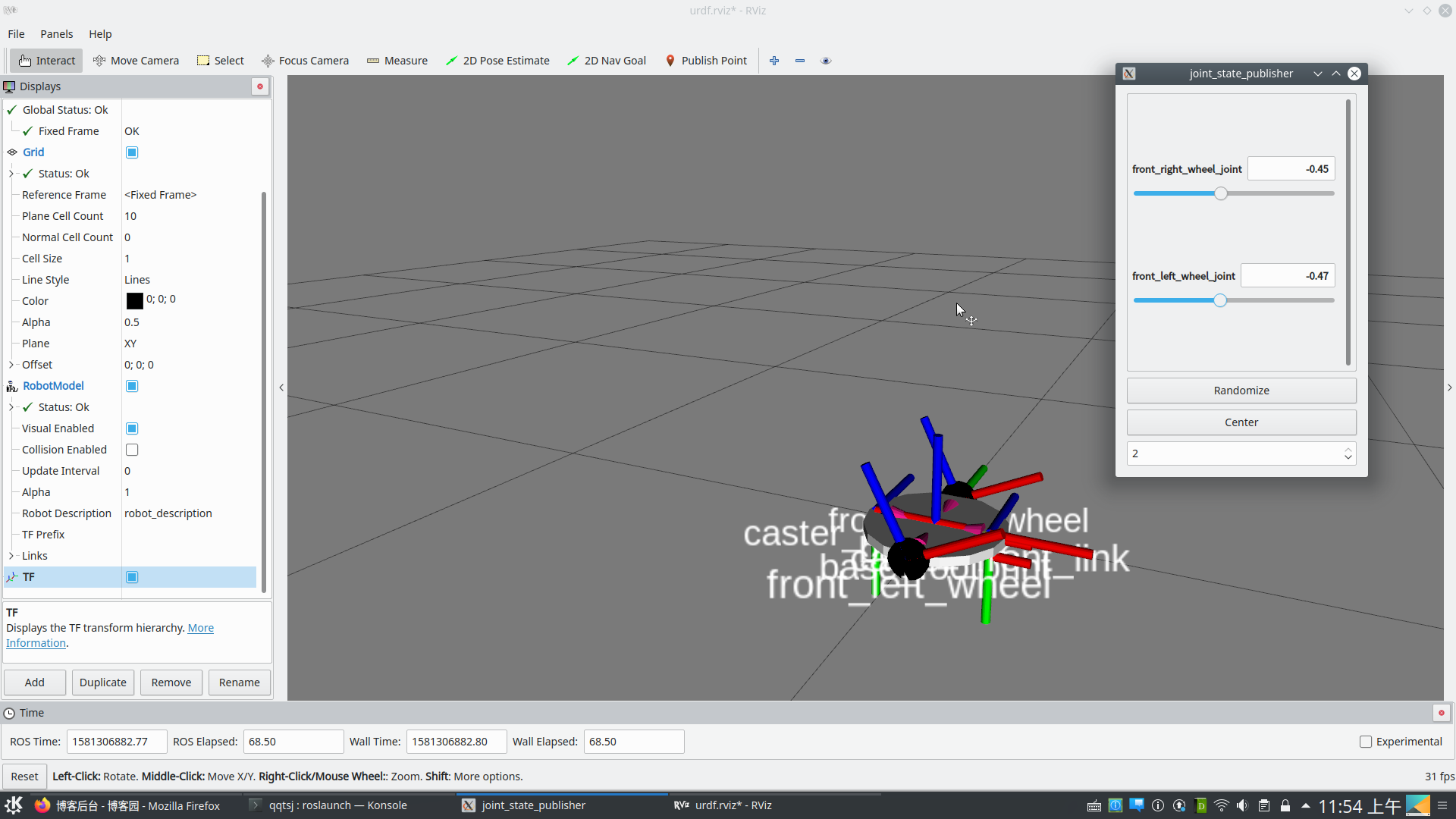
我们用以下命令查看移动机器人:
$roslaunch mastering_ros_robot_description_pkg view_mobile_robot.launch
机器人如下:
ROS中3D机器人建模(五)的更多相关文章
- ROS中3D机器人建模(四)
一.创建一个7-DOF机械臂机器人 创建一个名为seven_dof_arm.xacro的文件,写入相应的代码,其关节名称如下: bottom_joint shoulder_pan_joint shou ...
- ROS中3D机器人建模(一)
一,机器人建模的ROS软件包 *urdf : 机器人建模最重要的ros软件包是urdf软件包.这个软件包包含一个用于统一机器人描述格式(URDF)的C++解析器,它是一个表示机器人模型的XML文件,还 ...
- ROS中测试机器人里程计信息
在移动机器人建图和导航过程中,提供相对准确的里程计信息非常关键,是后续很多工作的基础,因此需要对其进行测试保证没有严重的错误或偏差.实际中最可能发生错误的地方在于机器人运动学公式有误,或者正负号不对, ...
- ROS中的3D建模机器人(三)
一.利用xacro理解机器人建模 当我们创建复杂的机器人模型时,URDF的灵活性将会降低,URDF缺少的主要特性是简单的.可重用性,模块化和可编程性. URDF是一个单独的文件我们不能在它里面包含其他 ...
- ROS中的3D机器人建模(二)
一,创建我们的第一个URDF模型 我们设计的第一个机器人模型是pan-and-tilt机械结构,代码如下 pan_tilt.urdf: 1 <?xml version="1.0&quo ...
- 机器人操作系统(ROS)教程22:ROS的3D可视化工具—rviz
rviz是ROS中的一个3D可视化工具,有了它就可以把你用代码建的机器人模型转化为可视的3D模型. 首先需要安装: rosdep install rviz 然后编译rviz: rosmake rviz ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- 对比几种在ROS中常用的几种SLAM算法
在此因为要总结写一个文档,所以查阅资料,将总结的内容记录下来,欢迎大家指正! 文章将介绍使用的基于机器人操作系统(ROS)框架工作的SLAM算法. 在ROS中提供的五种基于2D激光的SLAM算法分别是 ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
随机推荐
- echart环形图制作及出现的一些问题总结
环形图的形成其实就是echarts中的饼图pie,控制饼图的内圈半径和外圈半径来形成环形的效果!下面记录的问题是在开发中出现发现的,因为在网上找到了利用阴影来做下面的图: 说明: 由于代码比较长,不能 ...
- Mybatis 学习过程中出现空指针异常的错误【已解决】
Mybatis 学习过程中出现空指针异常的错误[已解决] 以下是写的小测试的代码 bean层 Player类(篮球队队员) bean层 Team类(篮球队) dao层 TeamDao.xml配置文件 ...
- javascript数组大全(一张图列出数组的所有方法)
把所有数组的方法列在了一张图上,为了自己温故一下,也为了以后忘记时好查阅. 如果大家在上面查阅方法,可以找到对应的方法名,看前面简单的注释,还是不能明白的话,可以看一下官网说明,地址给大家列出来,MD ...
- Hive直接读取Hbase及MySQL数据
0.概述 Hive对外提供了StorageHandler接口,提供了访问各种存储组件中的数据的能力.Hbase提供了HbaseStorageHandler,使得hive可以通过建立外部映射表访问hba ...
- win设置C、D、E等盘符图标为自定义的图片
1.选择一张jpg图片,在下面网站工具上,转为ico的图片(最好转64x64的清晰些). http://www.faviconico.org/favicon 2.在D盘下新建文本文件.txt,写入以下 ...
- CS系列(一):Cobalt Strike初体验
0X01 环境准备 Cobalt Strike安装包(链接:https://pan.baidu.com/s/1wCHJcJrF6H0wUCdetz3Xjg 提取码:rjuj) Cobalt Strik ...
- angular.foreach 循环方法
angular循环给一个 angular监听的变量复值时.最好还是用angular自带的循环方法.“angular.foreach” 尽量避免代码的冲突,最好不要jq angular 混用 var o ...
- MongoDB 上手开发实践(入门上手开发这一篇就够了)
前言 MongoDB是一个介于 关系数据库 和非关系数据库之间的产品,是非关系数据库当中功能最丰富,最像关系数据库的.它支持的数据结构非常松散,是类似 json 的 bson 格式,因此可以存储比较复 ...
- git stash使用
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明. 本文链接:https://blog.csdn.net/daguanjia11/article/ ...
- Spark学习笔记(三)—— Standalone模式
上篇笔记记录了Local模式的一些内容,但是实际的应用中很少有使用Local模式的,只是为了我们方便学习和测试.真实的生产环境中,Standalone模式更加合适一点. 1.基础概述 Standalo ...