ROS中的3D机器人建模(二)
一,创建我们的第一个URDF模型
我们设计的第一个机器人模型是pan-and-tilt机械结构,代码如下
pan_tilt.urdf:
1 <?xml version="1.0"?>
2 <robot name="pan_tilt">
3
4 <link name="base_link">
5
6 <visual>
7 <geometry>
8 <cylinder length="0.01" radius="0.2"/>
9 </geometry>
10 <origin rpy="0 0 0" xyz="0 0 0"/>
11 <material name="yellow">
12 <color rgba="1 1 0 1"/>
13 </material>
14 </visual>
15
16 <collision>
17 <geometry>
18 <cylinder length="0.03" radius="0.2"/>
19 </geometry>
20 <origin rpy="0 0 0" xyz="0 0 0"/>
21 </collision>
22 <inertial>
23 <mass value="1"/>
24 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
25 </inertial>
26 </link>
27
28 <joint name="pan_joint" type="revolute">
29 <parent link="base_link"/>
30 <child link="pan_link"/>
31 <origin xyz="0 0 0.1"/>
32 <axis xyz="0 0 1" />
33 <limit effort="300" velocity="0.1" lower="-3.14" upper="3.14"/>
34 <dynamics damping="50" friction="1"/>
35 </joint>
36
37 <link name="pan_link">
38 <visual>
39 <geometry>
40 <cylinder length="0.4" radius="0.04"/>
41 </geometry>
42 <origin rpy="0 0 0" xyz="0 0 0.09"/>
43 <material name="red">
44 <color rgba="0 0 1 1"/>
45 </material>
46 </visual>
47 <collision>
48 <geometry>
49 <cylinder length="0.4" radius="0.06"/>
50 </geometry>
51 <origin rpy="0 0 0" xyz="0 0 0.09"/>
52 </collision>
53 <inertial>
54 <mass value="1"/>
55 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
56 </inertial>
57 </link>
58
59 <joint name="tilt_joint" type="revolute">
60 <parent link="pan_link"/>
61 <child link="tilt_link"/>
62 <origin xyz="0 0 0.2"/>
63 <axis xyz="0 1 0" />
64 <limit effort="300" velocity="0.1" lower="-4.64" upper="-1.5"/>
65 <dynamics damping="50" friction="1"/>
66 </joint>
67
68 <link name="tilt_link">
69 <visual>
70 <geometry>
71 <cylinder length="0.4" radius="0.04"/>
72 </geometry>
73 <origin rpy="0 1.5 0" xyz="0 0 0"/>
74 <material name="green">
75 <color rgba="1 0 0 1"/>
76 </material>
77 </visual>
78 <collision>
79 <geometry>
80 <cylinder length="0.4" radius="0.06"/>
81 </geometry>
82 <origin rpy="0 1.5 0" xyz="0 0 0"/>
83 </collision>
84 <inertial>
85 <mass value="1"/>
86 <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/>
87 </inertial>
88
89 </link>
90
91
92 </robot>
详解URDF文件
<?xml version= "1.0"?>
<robot name = "pan_tilt">
<robot>标签定义了我们将要创建的机器人的名称。在这里,我们将机器人命名为pan_tilt.
如果我们查看<robot>标签定义之后的部分,我们可以看到pan-and-tilt机器结构中连杆和关节的定义:
<link name ="base_link">
<visual>
<geometry>
<cylinder length= "0.01" radius = "0.2"/>
</geometry>
<origin rpy= "0 0 0" xyz="0 0 0"/>
<material name = "yellow">
<color rgba>="1 1 0 1"/>
</material>
</visual>
</link>
前面的这段代码是pan-and-tilt机械结构的base_link的定义。<visual>标签描述了连杆的可见外观,它将在机器人仿真中显示出来。我们就可以用这个标签来定义连杆的几何形状(圆柱、立方体、球体、网络模型)以及连杆的材质(颜色和纹理)。
<joint name="pan_joint " type ="revolute">
<parent link = "base_link"/>
<child link="pan_link"/>
<origin xyz="0 0 0.1"/>
<axis xyz ="0 0 1"/>
</joint>
在前面的代码片段中,我们定义了一个具有唯一名称和关节类型的关节。在这里我们使用的关节类型是旋转关节(revolute),父连杆和子连杆分别是base_link和pan_link。在此标签内还指定了关节原点。
然后检查urdf是否包含错误,命令如下:
$ check_urdf pan_tilt.urdf
check_urdf命令将解析urdf标签并显示错误(如果有的话),如果一切正常,他将输出如下内容:
robot name is: pan_tilt
---------- Successfully Parsed XML ---------------
root Link: base_link has 1 child(ren)
child(1): pan_link
child(1): tilt_link
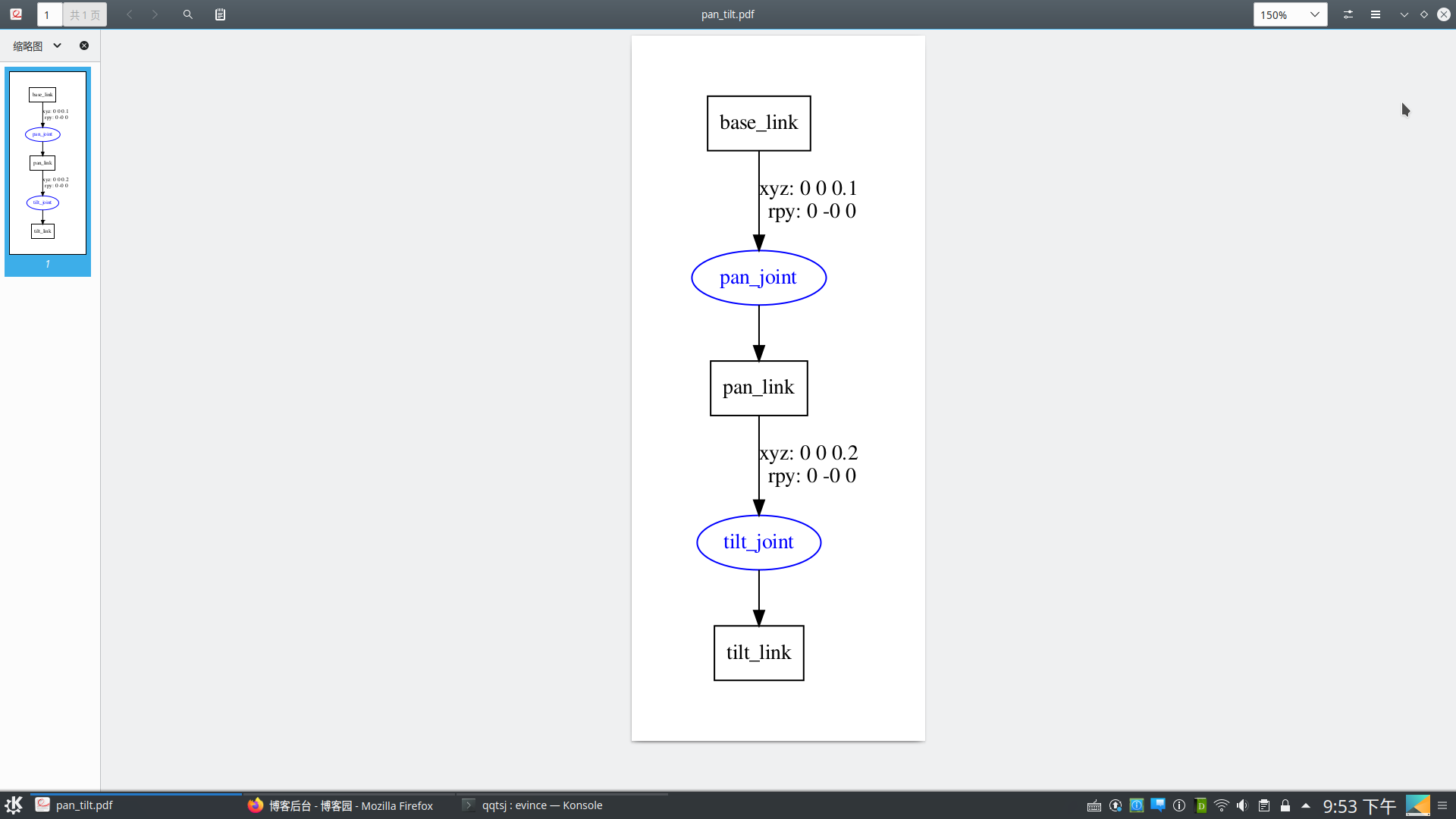
如果我们想以图形化的方式查看机器人连杆和关节的结构,我们可以使用一个名为urdf_to_graphiz的命令行工具:
$ urdf_to_graphiz pan_tilt.urdf
这个命令将生成两个文件:pan_tilt.gv和pan_tilt.pdf.
我们可以使用以下命令来查看此机器人的结构:
$ evince pan_tilt.pdf
如图所示:
二,在RViz中可视化机器人3D模型
设计好URDF后,可以在RViz上查看它。我们可以创建一个view_demo.launch启动文件,代码如下:
1 <launch>
2 <arg name="model" />
3 <param name="robot_description" textfile="$(find mastering_ros_robot_desc ription_pkg)/urdf/pan_tilt.urdf" />
4 <param name="use_gui" value="true"/>
5
6 <node name="joint_state_publisher" pkg="joint_state_publisher" type="join t_state_publisher" />
7 <node name="robot_state_publisher" pkg="robot_state_publisher" type="stat e_publisher" />
8 <node name="rviz" pkg="rviz" type="rviz" args="-d $(find mastering_ros_ro bot_description_pkg)/urdf.rviz" required="true" />
9
10 </launch>
11
我们使用如下命令来启动模型:
$ roslaunch mastering_ros_robot_description_pkg view_demo.launch
如果一切正常,我们将在RViz中看到这个pan-and-tilt机械结构,如图所示

ROS中的3D机器人建模(二)的更多相关文章
- ROS中的3D建模机器人(三)
一.利用xacro理解机器人建模 当我们创建复杂的机器人模型时,URDF的灵活性将会降低,URDF缺少的主要特性是简单的.可重用性,模块化和可编程性. URDF是一个单独的文件我们不能在它里面包含其他 ...
- ROS中3D机器人建模(五)
一.创建一个差速驱动移动机器人模型 前面我们已经创建了一个7-DOF机械臂机器人模型,接下来我们将创建一个差速机器人模型,差速轮式机器人在机器人底盘的两端安装两个轮子, 整个底盘由一个或两个脚轮支撑. ...
- ROS中3D机器人建模(四)
一.创建一个7-DOF机械臂机器人 创建一个名为seven_dof_arm.xacro的文件,写入相应的代码,其关节名称如下: bottom_joint shoulder_pan_joint shou ...
- ROS中3D机器人建模(一)
一,机器人建模的ROS软件包 *urdf : 机器人建模最重要的ros软件包是urdf软件包.这个软件包包含一个用于统一机器人描述格式(URDF)的C++解析器,它是一个表示机器人模型的XML文件,还 ...
- ROS学习笔记十二:使用gazebo在ROS中仿真
想要在ROS系统中对我们的机器人进行仿真,需要使用gazebo. gazebo是一种适用于复杂室内多机器人和室外环境的仿真环境.它能够在三维环境中对多个机器人.传感器及物体进行仿真,产生实际传感器反馈 ...
- ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0
ROS_Kinetic_07 ROS中机器人三维物理引擎高保真仿真利器gazebo 7.0 ROS kinetic中的gazebo版本是7.0,有很多新的特性. 首先,启动gazebo: ~$ gaz ...
- ROS和Gazebo进行机器人仿真(二)
一.在Gazebo中使用ROS控制器 在本节中,我们将讨论如何在Gazebo中让机器人的每个关节运动. 为了让关节动起来,我们需要分配一个ROS控制器,尤其是,我们需要为每个关节连上一个与transm ...
- ROS和Gazebo进行机器人仿真(一)
Gazebo是一种多机器人仿真器,可用于室内外机器人仿真.Gazebo在ROS中有良好的接口,包含ROS和Gazebo的所有控制. 若要实现ROS到Gazebo的通信,我们必须安装ROS-Gazebo ...
- ROS中发布激光扫描消息
激光雷达工作时会先在当前位置发出激光并接收反射光束,解析得到距离信息,而后激光发射器会转过一个角度分辨率对应的角度再次重复这个过程.限于物理及机械方面的限制,激光雷达通常会有一部分“盲区”.使用激光雷 ...
随机推荐
- 洛谷$P3756\ [CQOI2017]$老$C$的方块 网络流
正解:网络流 解题报告: 传送门$QwQ$ 看到不能出现给定的讨厌的图形,简单来说就,特殊边两侧的方格不能同时再连方格. 所以如果出现,就相当于是四种方案?就分别炸四个格子. 然后冷静分析一波之后发现 ...
- JS进阶——this绑定了谁?
一.this的意义 二.寻找this绑定对象 经常听到这么一句话,找this只需要看谁是调用方.当函数被调用时会记录函数调用调用方式.传参包括this等各种属性.有时候this绑定对象情况太抽象,找到 ...
- 基于 Blazui 的 Markdown 编辑器 Blazui.Markdown 尝鲜
想做一个文档平台用来存放和展示 Blazui 的文档,然后基于 Markdown 写文档,但缺一个好用的 Blazor Markdown 编辑器,所以就顺便写一个了,功能上基本抄的 https://p ...
- git简单使用指南
git - 简易指南 这是一篇最适合初学者的教程,这里面没有高深的内容.学习git它可以帮助你管项目代码,提高团队开发效率.我使用的是win10系统,这里我会用它来给大家讲解. git - 安装 安装 ...
- kubelet--help-v1.15.4
kubelet --help 官方文档 The kubelet is the primary "node agent" that runs on each node. It c ...
- 16.用pycharm导入自己写的模块时,import无法识别的解决办法
我们用pycharm打开自己写的代码,当多个文件之间有相互依赖的关系的时候,import无法识别自己写的文件,但是我们写的文件又确实在同一个文件夹中, 这种问题可以用下面的方法解决: 1)打开File ...
- java线程相关基本方法
java线程中常用的基本方法有wait,notify,notifyAll,sleep,join,yield等. 线程的生命周期一共分为五个部分,分别是:新建(New).就绪(Runnable).运行( ...
- bash shell-linux的预设shell
1.bash 是GNU 计划中重要的工具软件之一,目前也是Linux distributions 的标准shell.其主要功能如下: (1)命令记忆和历史功能,可以通过history查询,存储位置在~ ...
- .Net Core - AgileHttp
2020年新年将至,先预祝.Net Core越来越好. 做了这么多年一线开发,经常跟Http打交道.比如调用三方的Webservice,比如集成微信支付的时候服务端发起Prepay支付.特别是现在分布 ...
- js 鼠标位置
1.clientX.clientY 光标位置——>距离当前body可视区域的x,y坐标 2.pageX.pageY 光标位置——> 对于整个页面来说,包括了被卷去的body ...