OpenCV——SIFT特征检测与匹配
SIFT特征和SURF特征比较
| 比较项目 | SIFT | SURF |
|---|---|---|
| 尺度空间极值检测 | 使用高斯滤波器,根据不同尺度的高斯差(DOG)图像寻找局部极值 | 使用方形滤波器,利用海森矩阵的行列式值检测极值,并利用积分图加速运算 |
| 关键点定位 | 通过邻近信息插补来定位 | 与SIFT类似 |
| 方向定位 | 通过计算关键点局部邻域的方向直方图,寻找直方图中最大值的方向作为关键点的主方向 | 通过计算特征点周围像素点x,y方向的哈尔小波变换,将x、y方向小波变换的和向量的最大值作为特征点方向 |
| 特征描述子 | 是关键点邻域高斯图像梯度方向直方图统计结果的一种表示,是16*8=128维向量 | 是关键点邻域2D离散小波变换响应的一种表示,是16*4=64维向量 |
| 应用中的主要区别 | 通常在搜索正确的特征时更加精确,当然也更加耗时 | 描述子大部分基于强度的差值,计算更快捷 |
SIFT特征基本介绍
SIFT(Scale-Invariant Feature Transform)特征检测关键特征:
建立尺度空间,寻找极值
关键点定位(寻找关键点准确位置与删除弱边缘)
关键点方向指定
关键点描述子
建立尺度空间,寻找极值
工作原理
构建图像高斯金字塔,求取DOG,发现最大与最小值在每一级
构建的高斯金字塔,每一层根据sigma的值不同,可以分为几个待级,最少有4个。
关键点定位
我们在像素级别获得了极值点的位置,但是更准确的值应该在亚像素位置,如何得到--这个过程称为关键点(准确/精确)定位。
删除弱边缘--通过Hassian矩阵特征值实现,小于阈值自动舍弃。
关键点方向指定
求得每一层对应图像的梯度,根据给定的窗口大小
计算每个高斯权重,sigma=scale*1.5, 0-360之间建立36个直方图Bins
找最高峰对应的Bin,大于max*80%的都保留
这样就实现了旋转不变性,提高了匹配时候的稳定性
大约有15%的关键点会有多个方向
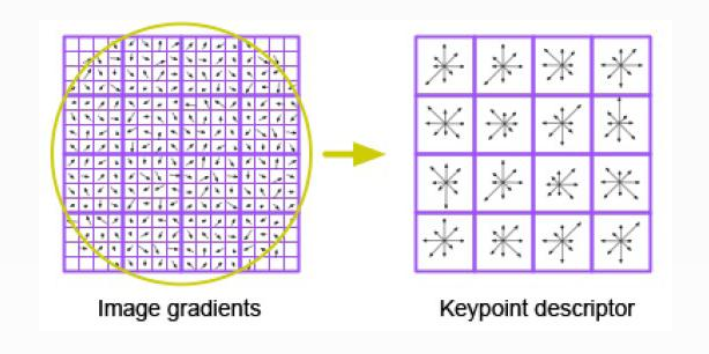
关键点描述子
拟合多项式插值寻找最大Peak
得到描述子 = 4*4*8=128
构造函数
cv::xfeatures2d::SIFT::create(
int nfeatures = 0,
int nOctaveLayers = 3, --高斯金字塔乘积数
double contrastThreshold = 0.04, --对比度
double edgeThreshold = 10, --边缘阈值,一般默认10就行
double sigma = 1.6
)
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
#include <iostream> using namespace cv;
using namespace cv::xfeatures2d;
using namespace std; int main(int argc, char** argv) {
Mat src = imread("test.jpg", IMREAD_GRAYSCALE);
if (src.empty()) {
printf("could not load image...\n");
return -;
}
namedWindow("input image", CV_WINDOW_AUTOSIZE);
imshow("input image", src); // SIFT特征点检测
int minHessian = ;
Ptr<SIFT> detector = SIFT::create(minHessian);//和surf的区别:只是SURF→SIFT
vector<KeyPoint> keypoints;
detector->detect(src, keypoints, Mat());//找出关键点 // 绘制关键点
Mat keypoint_img;
drawKeypoints(src, keypoints, keypoint_img, Scalar::all(-), DrawMatchesFlags::DEFAULT);
imshow("KeyPoints Image", keypoint_img); waitKey();
return ;
}
OpenCV——SIFT特征检测与匹配的更多相关文章
- OpenCV——Brisk特征检测、匹配与对象查找
检测并绘制特征点: #include <opencv2/opencv.hpp> #include <opencv2/xfeatures2d.hpp> #include < ...
- OpenCV——ORB特征检测与匹配
原文链接:https://mp.weixin.qq.com/s/S4b1OGjRWX1kktefyHAo8A #include <opencv2/opencv.hpp> #include ...
- OpenCV——SURF特征检测、匹配与对象查找
SURF原理详解:https://wenku.baidu.com/view/2f1e4d8ef705cc1754270945.html SURF算法工作原理 选择图像中的POI(Points of i ...
- opencv::sift特征提取
SIFT特征检测介绍 SIFT(Scale-Invariant Feature Transform)特征检测关键特性: -建立尺度空间,寻找极值 -关键点定位(寻找关键点准确位置与删除弱边缘) -关键 ...
- VS2010+Opencv+SIFT以及出现的问题-关于代码sift_3_c的说明
http://blog.sina.com.cn/s/blog_a6b913e30101dvrt.html 一.前提 安装Opencv,因该版本的SIFT是基于Opencv的. 下载SIFT源码,见Ro ...
- 使用Opencv中matchTemplate模板匹配方法跟踪移动目标
模板匹配是一种在图像中定位目标的方法,通过把输入图像在实际图像上逐像素点滑动,计算特征相似性,以此来判断当前滑块图像所在位置是目标图像的概率. 在Opencv中,模板匹配定义了6种相似性对比方式: C ...
- 《opencv学习》 之 特征检测与匹配
这几天学习SURF特征检测,直接看的视频和书本有点吃不消,现在是基本看懂了,如果写博客记录没有必要,因为网上都差不多,笔记都在书上了,以下是个人认为比较浅显易懂的文章,当然海有很多好文章我没看到. 看 ...
- Opencv Sift算子特征提取与匹配
SIFT算法的过程实质是在不同尺度空间上查找特征点(关键点),用128维方向向量的方式对特征点进行描述,最后通过对比描述向量实现目标匹配. 概括起来主要有三大步骤: 1.提取关键点: 2.对关键点附加 ...
- [opencv]KAZE、AKAZE特征检测、匹配与对象查找
AkAZE是KAZE的加速版 与SIFT,SUFR比较: 1.更加稳定 2.非线性尺度空间 3.AKAZE速度更加快 4.比较新的算法,只有Opencv新的版本才可以用 AKAZE局部匹配介绍 1.A ...
随机推荐
- NIO,AIO,BIO
同步和异步:同步和异步关注的是消息通信机制, 同步:就是在发出一个“调用”时,在没有得到结果之前,该“调用”就不返回,但是一旦调用返回,就得到返回值了;换句话说:就是由“调用者”主动等待“调用”结果 ...
- 获取url地址的参数值
使用频率很高,百度了记录一下 $.getUrlParam = function (name) { var reg = new RegExp("(^|&)" + name + ...
- python 递归和二分法
一 内置函数 1. revserd 翻转,返回的是迭代器 # 将 s 倒置 s = '不是上海自来水来自海上' # 方法一 print(s[::-1]) # 方法二 s1 = reversed(s) ...
- js-ES6学习笔记-Symbol
1.ES6引入了一种新的原始数据类型Symbol,表示独一无二的值.它是JavaScript语言的第七种数据类型,前六种是:Undefined.Null.布尔值(Boolean).字符串(String ...
- 【代码笔记】iOS-屏幕根据键盘自动的变化高度
一,效果图. 二,代码. ViewController.h #import <UIKit/UIKit.h> @interface ViewController : UIViewContro ...
- @Schedul 中cron的命名规则
@Schedul注解的定时任务详解 1.springboot集成schedule由于Spring Schedule包含在spring-boot-starter基础模块中了,所有不需要增加额外的依赖. ...
- IIS 下调用证书出现异常解决方案 (C#)
程序发布前,跑在vs上是没问题的,当发布后,程序就报错了.通过系统日志找到了错误所在:证书调用时出现了异常.原因是:在IIS上调用证书是需要配置的,具体配置如下: 一. 确保证书已安装 1. 点击 [ ...
- Vue + Spring Boot从零开始搭建个人网站(一) 之 项目前端Vue.js环境搭建
前言: 最近在考虑搭建个人网站,想了想决定采用前后端分离模式 前端使用Vue,负责接收数据 后端使用Spring Boot,负责提供前端需要的API 就这样开启了我边学习边实践之旅 Vue环境搭建步骤 ...
- 大数据【四】MapReduce(单词计数;二次排序;计数器;join;分布式缓存)
前言: 根据前面的几篇博客学习,现在可以进行MapReduce学习了.本篇博客首先阐述了MapReduce的概念及使用原理,其次直接从五个实验中实践学习(单词计数,二次排序,计数器,join,分 ...
- Unity Profiler GPU Usage(GPU使用情况)
一般情况下性能瓶颈都在CPU上,这儿也列举下几个常见的GPU耗时函数吧. 1 Render.Mesh 绘制网格面(没批处理的面) 2 Batch.DrawStatic 静态批处理 3 Batch.Dr ...