implement Google's Open Source Slam "Cartographer" demos in ROS/rviz
Cartographer is a backpack equipped with Simultaneous Localization and Mapping (SLAM) technology.
1. Platform
Dell PC installed Ubuntu 14.4 and ROS Indigo.
2. Building & Installation
We recommend using wstool and rosdep. For faster builds, we also recommend using Ninja.
# Install wstool and rosdep.
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build # Create a new workspace in 'catkin_ws'.
mkdir catkin_ws
cd catkin_ws
wstool init src # Merge the cartographer_ros.rosinstall file and fetch code for dependencies.
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall
wstool update -t src # Install deb dependencies.
rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y # Build and install.
catkin_make_isolated --install --use-ninja
source install_isolated/setup.bash
3. Running the demos
Now that Cartographer and Cartographer’s ROS integration are installed, download the example bags (e.g. 2D and 3D backpack collections of the Deutsches Museum) to a known location, in this case ~/Downloads, and use roslaunch to bring up the demo:
# Download the 2D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag # Launch the 2D backpack demo.
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag # Download the 3D backpack example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/cartographer_3d_deutsches_museum.bag # Launch the 3D backpack demo.
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/cartographer_3d_deutsches_museum.bag # Download the Revo LDS example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/revo_lds/cartographer_paper_revo_lds.bag # Launch the Revo LDS demo. ---- Failed to implement this one.
roslaunch cartographer_ros demo_revo_lds.launch bag_filename:=${HOME}/Downloads/cartographer_paper_revo_lds.bag # Download the PR2 example bag.
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag # Launch the PR2 demo.
roslaunch cartographer_ros demo_pr2.launch bag_filename:=${HOME}/Downloads/2011-09-15-08-32-46.bag
The launch files will bring up roscore and rviz automatically.
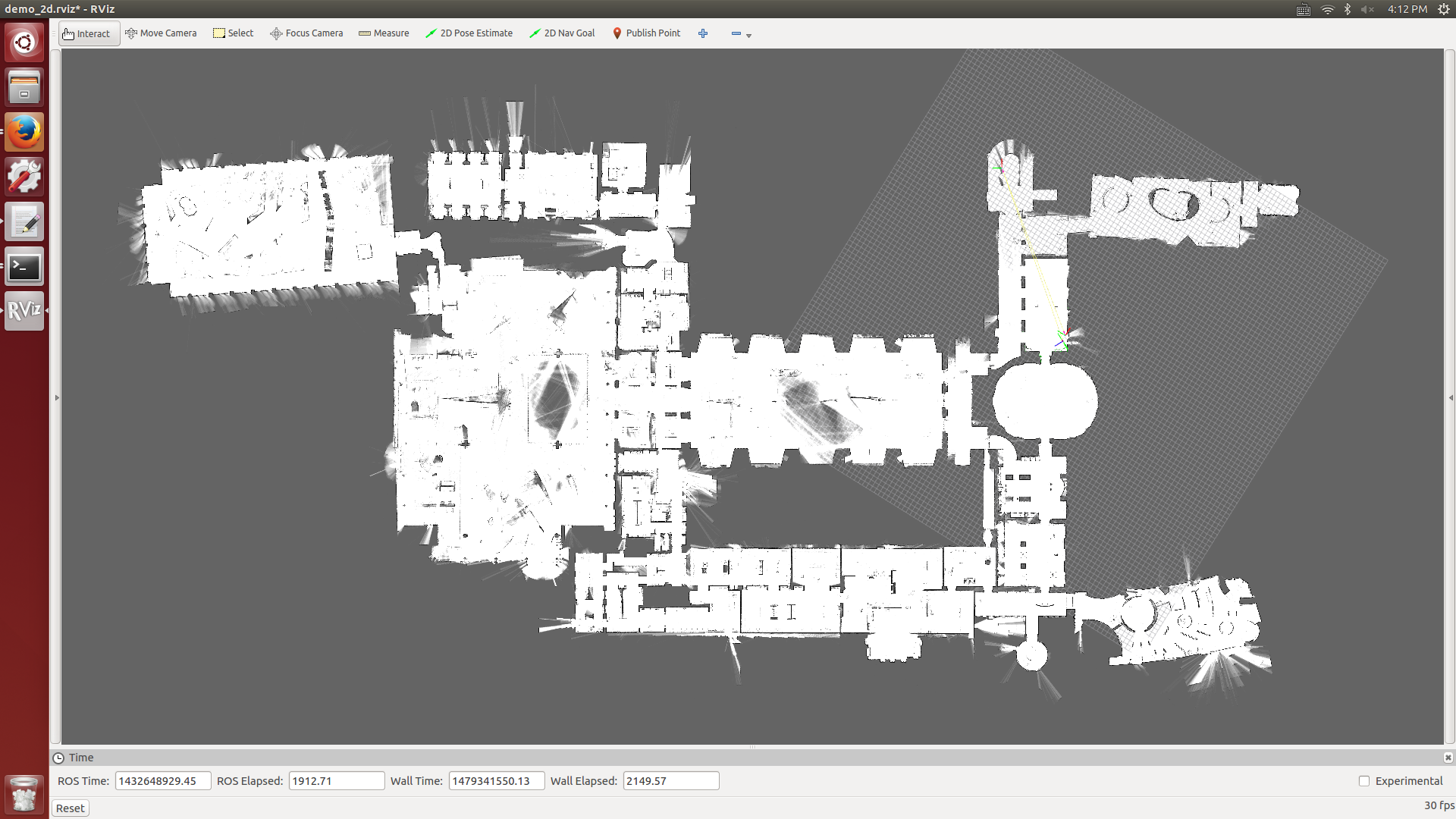
4. Results
2D backpack demo:
3D backpack demo:

Revo LDS demo:
Failed
PR2 demo:

Reference:
implement Google's Open Source Slam "Cartographer" demos in ROS/rviz的更多相关文章
- Google's Open Source SLAM Library ---- Cartographer
What is Cartographer? Google announce the open source release of Cartographer, a real-time simultane ...
- slam cartographer 学习
https://github.com/slam4code 感谢大牛的分享
- cartographer Ubuntu16.04 ros环境配置
首先要正确安装 ROS ,然后第12步应注意,proto的版本是个关键容易出错. 1.添加ROS源http:/packages.ros.org/ros/ubuntu xenial main ( ...
- Open Source Projects Released By Google
Open Source Projects Released By Google Google has released over 20 million lines of code and over 9 ...
- ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM
ROS_Kinetic_27 在ROS中使用Cartographer进行SLAM Cartographer是谷歌新開源的通用的2D和3D定位與構圖同步的SLAM工具,並提供ROS接口. 论文Real- ...
- [资源] Open source packages on SLAM
OpenSLAM http://openslam.org/ Most main stream open source slam resource can be found on OpenSLAM, w ...
- source.android.google && developer.android.google
https://source.android.google.cn/ https://developer.android.google.cn/ https://source.android.com/co ...
- (转) 实时SLAM的未来及与深度学习的比较
首页 视界智尚 算法技术 每日技术 来打我呀 注册 实时SLAM的未来及与深度学习的比较 The Future of Real-Time SLAM and “Deep Learni ...
- 基于视觉的 SLAM/Visual Odometry (VO) 开源资料、博客和论文列表
基于视觉的 SLAM/Visual Odometry (VO) 开源资料.博客和论文列表 以下为机器翻译,具体参考原文: https://github.com/tzutalin/awesome-vis ...
随机推荐
- django templates学习使用记录
可以在基本模板中多插入几个black来适应不同的布局
- mysql字段varchar区分大小写utf8_bin、utf8_general_ci编码区别
mysql字段varchar区分大小写utf8_bin.utf8_general_ci编码区别 在mysql中存在着各种utf8编码格式:utf8_bin将字符串中的每一个字符用二进制数据存储,区分大 ...
- PHP Deprecated: Comments starting with '#' are deprecated in *.ini 警告解决办法
新装的ubuntu 10.04系统,使用新立得装的PHP,但是每次我在命令行下执行php脚本时都会出如下的警告信息: PHP Deprecated: Comments starting with ' ...
- PostgreSQL中使用外部表
1. 安装file_fdw 需要先安装file_fdw,一般是进到PostgreSQL的源码包中的contrib/file_fdw目录下,执行: make make install 然后进入数据库中, ...
- SURF
推荐:http://www.cnblogs.com/tornadomeet/archive/2012/08/17/2644903.html SURF-Speeded Up Robust Feature ...
- Java对象转xml报文和xml报文转Java对象帮助类
import javax.xml.bind.JAXBContext; import javax.xml.bind.JAXBException; import javax.xml.bind.Marsha ...
- Winform知识点
Winform窗体常用的控件 1.按钮 Button 前缀:btn 2.文本框 TextBox 前缀:txt 3.单选按钮 RadioButton 前缀:rdo 4.复选按钮 CheckBox 前缀: ...
- MVC设计模式((javaWEB)在数据库连接池下,实现对数据库中的数据增删改查操作)
设计功能的实现: ----没有业务层,直接由Servlet调用DAO,所以也没有事务操作,所以从DAO中直接获取connection对象 ----采用MVC设计模式 ----采用到的技术 .MVC设计 ...
- hiho 第119周 最大权闭合子图
描述 周末,小Hi和小Ho所在的班级决定举行一些班级建设活动. 根据周内的调查结果,小Hi和小Ho一共列出了N项不同的活动(编号1..N),第i项活动能够产生a[i]的活跃值. 班级一共有M名学生(编 ...
- 安装zeromq以及zeromq的python示例
下载ZeroMq: wget https://github.com/zeromq/zeromq4-1/releases/download/v4.1.5/zeromq-4.1.5.tar.gz 解压: ...