STM32之PWM波形输出配置总结
一. TIMER分类:
STM32中一共有11个定时器,其中TIM6、TIM7是基本定时器;TIM2、TIM3、TIM4、TIM5是通用定时器;TIM1和TIM8是高级定时器,以及2个看门狗定时器和1个系统嘀嗒定时器。其中系统嘀嗒定时器是前文中所描述的SysTick。
|
定时器 |
计数器分辨率 |
计数器类型 |
预分频系数 |
产生DMA请求 |
捕获/比较通道 |
互补输出 |
|
TIM1 TIM8 |
16位 |
向上,向下,向上/向下 |
1-65536之间的任意数 |
可以 |
4 |
有 |
|
TIM2 TIM3 TIM4 TIM5 |
16位 |
向上,向下,向上/向下 |
1-65536之间的任意数 |
可以 |
4 |
没有 |
|
TIM6 TIM7 |
16位 |
向上 |
1-65536之间的任意数 |
可以 |
0 |
没有 |
其中TIM1和TIM8是能够产生3对PWM互补输出,常用于三相电机的驱动,时钟由APB2的输出产生。TIM2-TIM5是普通定时器,TIM6和TIM7是基本定时器,其时钟由APB1输出产生。
二、PWM波形产生的原理:
产生波形原理来源:http://www.ndiy.cn/thread-31081-1-1.html
通用定时器可以利用GPIO引脚进行脉冲输出,在配置为比较输出、PWM输出功能时,捕获/比较寄存器TIMx_CCR被用作比较功能,下面把它简称为比较寄存器。
这里直接举例说明定时器的PWM输出工作过程:若配置脉冲计数器TIMx_CNT为向上计数,而重载寄存器TIMx_ARR被配置为N,即TIMx_CNT的当前计数值数值X在TIMxCLK时钟源的驱动下不断累加,当TIMx_CNT的数值X大于N时,会重置TIMx_CNT数值为0重新计数。
而在TIMxCNT计数的同时,TIMxCNT的计数值X会与比较寄存器TIMx_CCR预先存储了的数值A进行比较,当脉冲计数器TIMx_CNT的数值X小于比较寄存器TIMx_CCR的值A时,输出高电平(或低电平),相反地,当脉冲计数器的数值X大于或等于比较寄存器的值A时,输出低电平(或高电平)。
如此循环,得到的输出脉冲周期就为重载寄存器TIMx_ARR存储的数值(N+1)乘以触发脉冲的时钟周期,其脉冲宽度则为比较寄存器TIMx_CCR的值A乘以触发脉冲的时钟周期,即输出PWM的占空比为 A/(N+1) 。
三、STM32产生PWM的配置方法:
1、配置GPIO口:
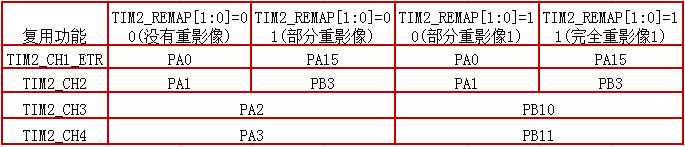
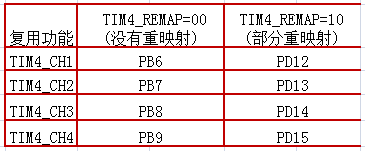
配置IO口的时候无非就是开启时钟,然后选择引脚、模式、速率,最后就是用结构体初始化。不过在32上,不是每一个IO引脚都可以直接使用于PWM输出,因为在硬件上已经规定了用某些引脚来连接PWM的输出口。下面是定时器的引脚重映像,其实就是引脚的复用功能选择:
a.定时器1的引脚复用功能映像:

b.定时器2的引脚复用功能映像:
c.定时器3的引脚复用功能映像:

d.定时器4的引脚复用功能映像:
根据以上重映像表,我们使用定时器3的通道2作为PWM的输出引脚,所以需要对PB5引脚进行配置,对IO口操作代码:
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);//使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //选择Timer3部分重映像
//选择定时器3的通道2作为PWM的输出引脚TIM3_CH2->PB5 GPIOB.5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化引脚
2、初始化定时器:
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//定义初始化结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //使能定时器3时钟
//初始化TIM3
TIM_TimeBaseStructure.TIM_Period = arr; //自动重装载寄存器的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //TIMX预分频的值
TIM_TimeBaseStructure.TIM_ClockDivision = ; //时钟分割
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据以上功能对定时器进行初始化
3、设置TIM3_CH2的PWM模式,使能TIM3的CH2输出:
TIM_OCInitTypeDef TIM_OCInitStructure;//定义结构体
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;//选择定时器模式,TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;//输出比较极性低
TIM_OC2Init(TIM3, &TIM_OCInitStructure);//根据结构体信息进行初始化
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能定时器TIM2在CCR2上的预装载值
4、使能定时器3:
TIM_Cmd(TIM3, ENABLE); //使能定时器TIM3
经过以上的操作,定时器3的第二通道已经可以正常工作并输出PWM波了,只是其占空比和频率都是固定的,我们可以通过改变TIM3_CCR2,则可以控制它的占空比。修改占空比的函数为:TIM_SetCompare2(TIM3,n); n不同,占空比不同。
5、修改pwm波形的占空比:
编写一个函数:void TIM3_PWM_Init(u16 arr,u16 psc);将以上所有的代码都加进来这个函数中,只要在main函数中调用该函数进行初始化,然后使用TIM_SetCompare2()函数修改PWM的占空比就可以在PB5脚得到需要的PWM波形了。关于频率以及占空比的计算方法有以下例子:
int main(void)
{
TIM3_PWM_Init(,);//频率为:72*10^6/(9999+1)/(143+1)=50Hz
TIM_SetCompare2(TIM3,);//得到占空比为50%的pwm波形
while();
}
可参考:http://www.cnblogs.com/wangh0802PositiveANDupward/archive/2012/12/29/2839313.html
STM32之PWM波形输出配置总结的更多相关文章
- STM32 TIM 多通道互补PWM波形输出配置快速入门
platform:stm32f10xxx lib:STM32F10x_StdPeriph_Lib_V3.5.0 前言 在做三相逆变的时候,需要软件生成SVPWM波形,具体的算法需要产生三对互补的PWM ...
- STM32 HAL库学习系列第4篇 定时器TIM----- 开始定时器与PWM输出配置
基本流程: 1.配置定时器 2.开启定时器 3.动态改变pwm输出,改变值 HAL_TIM_PWM_Start(&htim4, TIM_CHANNEL_1); 函数总结: __HAL_TIM ...
- 基于STM32F030F4P9和STM32 CUBEMX 输出PWM波形
STM32F030F4P9定时器功能比较丰富,在此记录项目中使用其自动输出PWM波形(频率:50HZ).CubeMX配置定时器如下图说明. 在此定时器基础时钟为48MHZ,配置中不做分频处理,预分频系 ...
- STM32F4_TIM输出PWM波形(可调频率、占空比)
Ⅰ.概述 上一篇文章关于STM32基本的计数原理明白之后,该文章是在其基础上进行拓展,讲述关于STM32比较输出的功能,以输出PWM波形为实例来讲述. 提供实例工程中比较实用的函数:只需要调用该函数, ...
- STM32 PWM的输出与Keil软件仿真
导读:PWM(Pulse Width Modulation)控制——脉冲宽度调制技术,通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形(含形状和幅值). PWM控制技术在逆变电路中应用最广,应用 ...
- 基于STM32F429和Cube的主从定时器多通道输出固定个数的PWM波形
主从定时器的原理已在上篇博文: 基于STM32F429+HAL库编写的定时器主从门控模式级联输出固定个数PWM脉冲的程序 讲解了,这篇重点就讲如何实现多通道的PWM级联输出. 1.软件环境 Keil5 ...
- stm32之PWM
PWM是pulse width modulation的缩写,即脉冲宽度调制.其通过对一系列脉冲的宽度进行调制,来等效地获得所需要波形: 1.PWM是一种对模拟信号电平进行数字编码的方法.通过高分辨率计 ...
- 【转载】 stm32之PWM
发现这位博主的博客被大量的转发,我也转载一篇,谁叫人家写的好呢. 原文地址:http://blog.sina.com.cn/s/blog_49cb42490100s6uh.html 脉冲宽度调制(PW ...
- 【STM32】PWM DAC基本原理(实验:PWM实现DAC)
虽然STM32F103ZET6具有内部DAC,但是也仅仅只有两条DAC通道,并且STM32还有其他的很多型号是没有DAC的.通常情况下,采用专用的D/A芯片来实现,但是这样就会带来成本的增加. 不过S ...
随机推荐
- protobuf框架简介
protocolbuffer(以下简称PB)是google 的一种数据交换的格式,它独立于语言,独立于平台.google 提供了三种语言的实现:java.c+ ...
- 记一次项目中的css样式复用
本文同步至微信公众号:http://mp.weixin.qq.com/s?__biz=MzAxMzgwNDU3Mg==&mid=401616238&idx=1&sn=3c6e9 ...
- 优化 从Draw Calls到GC
原文出处: 慕容小匹夫的博客(@慕容小匹夫) 欢迎分享原创到伯乐头条 前言: 刚开始写这篇文章的时候选了一个很土的题目...<Unity3D优化全解析>.因为这是一篇临时起意才写的文章 ...
- 第8章 BOM
8.1 window对象 window有双重的角色,既可以通过JavaScript访问浏览器窗口的接口,又是ECMAScript规定的Global对象. 全局作用域中声明的变量.函数都会变成windo ...
- select下拉框选中问题
每一次操作select的时候,总是要出来翻一下资料,不如自己总结一下,以后就翻这里了. 比如<select class="selector"></select&g ...
- oracle 返回第一个不为空的列的值
) from emp; 作用是返回函数coalesce参数中第一个不为null的值.
- Direct3D学习笔记 - 浅析HDR Lighting Sample
一.HDR简介 HDR(High Dynamic Range,高动态范围)是一种图像后处理技术,是一种表达超过了显示器所能表现的亮度范围的图像映射技术.高动态范围技术能够很好地再现现实生活中丰富的亮度 ...
- 【Python全栈笔记】07 [模块二] 20 Oct 冒泡排序
给出一个列表,进行冒泡排序 原理算法: li = [52, 37, 23, 11, 3, 1, ] print(li) # 每次循环,进行一次排序,列表内数字两两比较,最大的数字排到最末尾 # 一共循 ...
- 关于c#的事件如何使用
c#的委托delegate事件的详细使用 一.无参数,无返回的委托事件 委托事件类.事件的发生源.1.声明委托 2定义事件 3具体方法 public class Test { // …. publi ...
- C++基础-01
指针 - 指针的基本操作间接引用指针所指向的对象 - 机器一般按字节寻址,所以能够独立分配的最小空间是1字节,也就是说指针指向的 最小空间为1字节.特别地,对于bool变量,虽然实际需要的是1bit, ...