Dijkstra 路径规划 C#
示例无向图如下:(起始点为v0)

邻接矩阵为:
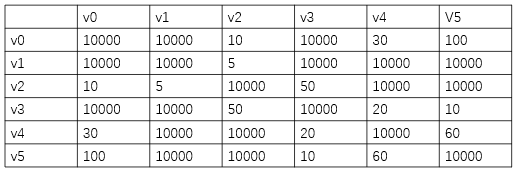
注意:其中没有连接的边和自己到自己的点权值用10000表示。
代码:
static void Main(string[] args)
{
int[,] graph = new int[,] { { , , , , , }, { , , , , , }, { , , , , , }, { , , , , , }, { , , , , , }, { , , , , , } };
int n = 6;
int[] S = new int[n]; //最短路径的顶点集合 string[] mid = new string[n];//点的路线
for (int i = ; i < n; i++)
{
S[i] = ;
mid[i] = "";
}
ShortestPathByDijkstra(n, graph, S, mid);
} public static int IsContain(int m,int[] S)//判断该顶点是否已经计算过
{
int index = -;
for (int i = ; i < ; i++)
{
if (S[i] == m)
{
index = i;
}
}
return index;
} /// <summary>
/// Dijkstrah实现最短路算法
/// </summary>
static void ShortestPathByDijkstra(int n,int[,] graph, int[] S, string[] mid)
{
int min;
int next; for (int f = n-; f > ; f--)
{
//置为初始值
min = ;
next = ;//第一行最小的元素所在的列 next点
//找出第一行最小的列值
for (int j = ; j < n; j++)//循环第0行的列
{
if ((IsContain(j,S) == -) && (graph[, j] < min))//不在S中,找出第一行最小的元素所在的列
{
min = graph[, j];
next = j;
}
}
//将下一个点加入S
S[next] = next;
if (min == )
{
Console.WriteLine("V0到V{0}的最短路径为:无", next);
}
else
{
Console.WriteLine("V0到V{0}的最短路径为:{1},路径为:V0{2}->V{0}", next, min, mid[next]);
}
// 重新初始0行所有列值
for (int j = ; j < n; j++)//循环第0行的列
{
if (IsContain(j,S) == -)//初始化除包含在S中的
{
if ((graph[next, j] + min) < graph[, j])//如果小于原来的值就替换
{
graph[, j] = graph[next, j] + min;
mid[j] = mid[next] + "->V" + next;//记录过程点
}
}
}
}
}
结果

解析:
分三部分,主函数中给出图中的初始邻接矩阵,顶点个数。以及初始化最短路径的顶点集合和点路线集合。
IsContain(int m,int[] S)这个函数是在每次循环的时候判断该点是否已经在最短路径集合中,即已经遍历过。
接下来就是Dijkstra算法,大致步骤如下:
1、添加初始顶点v0在集合S中,遍历第一行,找最小的权值所在的顶点列值j。
2、将j值做为下一个点加入集合S中,输出此时到达j点的最小路径。
3、重新初始化第一行的值,通过判断加入某点后graph[next][j]+min是否小于graph[0, j](其中j不在集合S中),若是则替换后者,并记录此过程 mid[j] = mid[next] + "->V" + next;
4、循环1、2、3步骤顶点数-1次。
详细参考:https://blog.csdn.net/qq_25954259/article/details/78289335?locationNum=5&fps=1
Dijkstra 路径规划 C#的更多相关文章
- 全局路径规划算法Dijkstra(迪杰斯特拉算法)- matlab
参考博客链接:https://www.cnblogs.com/kex1n/p/4178782.html Dijkstra是常用的全局路径规划算法,其本质上是一个最短路径寻优算法.算法的详细介绍参考上述 ...
- 机器人路径规划其一 Dijkstra Algorithm【附动态图源码】
首先要说明的是,机器人路径规划与轨迹规划属于两个不同的概念,一般而言,轨迹规划针对的对象为机器人末端坐标系或者某个关节的位置速度加速度在时域的规划,常用的方法为多项式样条插值,梯形轨迹等等,而路径规划 ...
- 【BZOJ-3627】路径规划 分层图 + Dijkstra + spfa
3627: [JLOI2014]路径规划 Time Limit: 30 Sec Memory Limit: 128 MBSubmit: 186 Solved: 70[Submit][Status] ...
- 基于谷歌地图的Dijkstra算法水路路径规划
最终效果图如下: 还是图.邻接表,可以模拟出几个对象=>节点.边.路径.三个类分别如下: Node 节点: using System; using System.Collections.Gene ...
- ROS探索总结(十四)——move_base(路径规划)
在上一篇的博客中,我们一起学习了ROS定位于导航的总体框架,这一篇我们主要研究其中最重要的move_base包. 在总体框架图中可以看到,move_base提供了ROS导航的配置.运行.交互接口,它主 ...
- 游戏AI之路径规划(3)
目录 使用路径点(Way Point)作为节点 洪水填充算法创建路径点 使用导航网(Navigation Mesh)作为节点 区域分割 预计算 路径查询表 路径成本查询表 寻路的改进 平均帧运算 路径 ...
- move_base的全局路径规划代码研究
algorithmn parameter code 主要是以下三个函数 计算所有的可行点 怎么计算一个点的可行点 从可行点中计算路径path todo algorithmn 算法的解释 Dijkstr ...
- ROS源码解读(二)--全局路径规划
博客转载自:https://blog.csdn.net/xmy306538517/article/details/79032324 ROS中,机器人全局路径规划默认使用的是navfn包 ,move_b ...
- ROS机器人路径规划介绍--全局规划
ROS机器人路径规划算法主要包括2个部分:1)全局路径规划算法:2)局部路径规划算法: 一.全局路径规划 global planner ROS 的navigation官方功能包提供了三种全局路径规划器 ...
随机推荐
- Codeforces 571B Minimization:dp + 贪心【前后相消】
题目链接:http://codeforces.com/problemset/problem/571/B 题意: 给你一个长度为n的数列a[i]. 现在你可以随意改变数字的位置,问你 ∑| a[i] - ...
- ajax如何处理返回的数据格式是xml的情况
<!DOCTYPE html> <html> <head> <title>用户注册</title> <meta charset=&qu ...
- 微信等webview中无法修改document.title的情况
// hack在微信等webview中无法修改document.title的情况 var $iframe = $('<iframe src="https://www.bbtree.co ...
- Thinkphp跨模块调用视图文件
当需要跨模块调用视图文件时,需要使用被包含文件的完整路径,如: <include file="./App/Home/View/Store/header.html"/> ...
- 仿联想商城laravel实战---5、无刷新的增删改查(动态页面更新的三种方式(html))
仿联想商城laravel实战---5.无刷新的增删改查(动态页面更新的三种方式(html)) 一.总结 一句话总结: 直接js增加删除修改html 控制器直接返回处理好的页面 用双向绑定插件比如vue ...
- mybatis学习第(二)天
Mybatis第二天 高级映射 查询缓存 关于与spring的整合和反转工程我偷懒了,下次看. 使用的sql: CREATE TABLE USER( id INT PRIMARY KEY A ...
- popupTheme和theme
popupTheme是指toolBar中弹出的menu的Theme. 那么,如果想让ToolBar的文字是白色,如果你设置Toolbar的Theme是 "ThemeOverlay.AppCo ...
- Centos6.5 安装pip
1.下载 sudo wget https://bootstrap.pypa.io/get-pip.py --no-check-certificate 2.安装 python get-pip.py 参 ...
- MyEclipse 手动安装Velocity 编辑器
最近项目有使用Velocity 模板引擎,从而会用到*.VM页面!Myeclipse打开VM页面字体一片漆黑,哪有JSP那样看起来舒服(个人感觉)!为了解决这一问题就要安装Velocity编辑器,安装 ...
- altium designer 中的top/bottom solder和top/bottom paste mask
转载请注明出处:http://blog.csdn.net/qq_26093511/article/details/51751936 1.top solder为助焊层,说白一点就是说,有这个层的地方就没 ...