软件篇-05-融合ORB_SLAM2和IMU闭环控制SLAM底盘运动轨迹
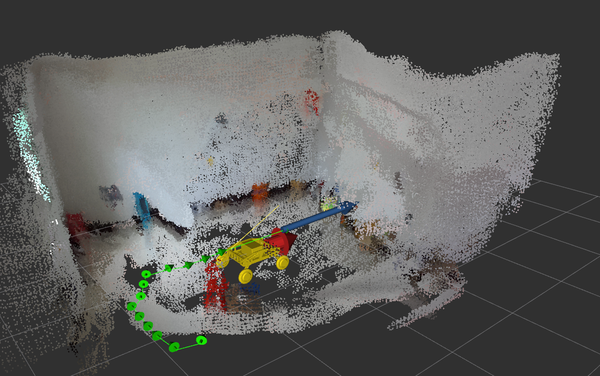
前面我们已经得到了当前底盘在世界坐标系中的位姿,这个位姿是通过融合ORB_SLAM2位姿和IMU积分得到的,在当前位姿已知的case下,给SLAM小车设置一个goal,我这里是通过上位机设置,然后使用上篇文章中的轨迹规划方法就可以得到一个路径Queue。
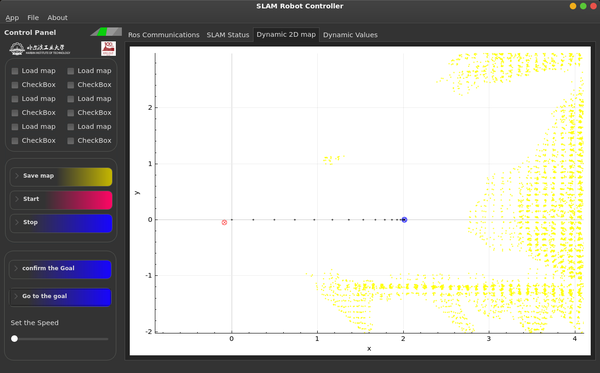
- 运动控制逻辑框架
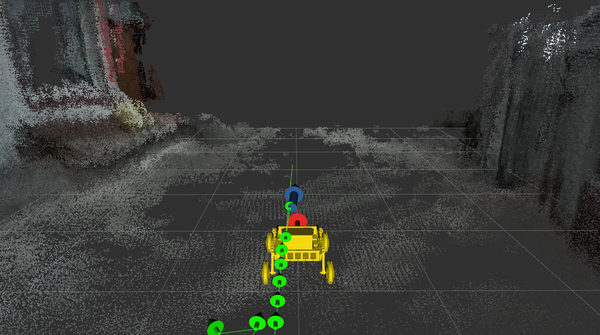
红点是当前点,蓝色是目标点,图例标反了
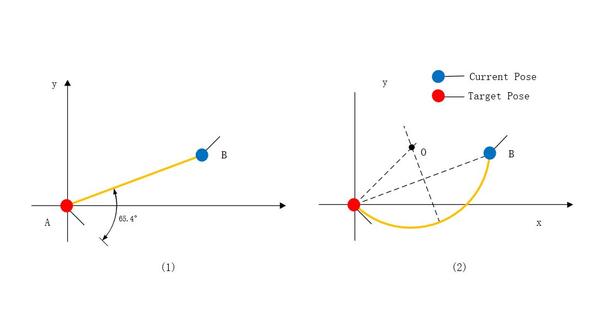
- 闭环控制
- 旋转过程中旋转的角度;
- 直线运动中小车的朝向以及当前位置和B点的距离。
bool fromPoseCmdvel(geometry_msgs::PoseStamped);
bool setTargetSpeed(float vLeft, float vRight, uint8_t direction);
bool setTargetOmega(float omega, float omegaBias);
bool posePidController(float targetAngle, float currentAngle);
bool posePidController(float target_x, float target_y, float current_x, float current_y, float targetAngle, float currentAngle);
float omegaPidController(float omegaTarget, float omegaActual);
float thetaPidController(float thetaTarget, float thetaActual);bool fromPoseCmdvel(geometry_msgs::PoseStamped);
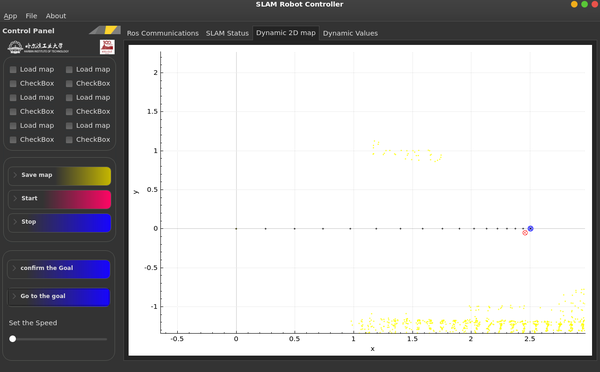
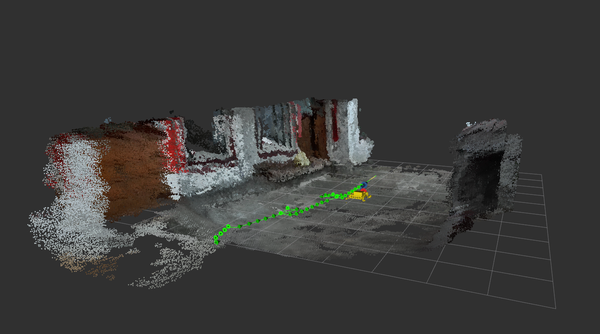
- 实验结果

- 最后做了一个小小的避障实验
软件篇-05-融合ORB_SLAM2和IMU闭环控制SLAM底盘运动轨迹的更多相关文章
- 软件篇-03-基于ORB_SLAM2手写SLAM稠密地图构建实现
本文使用的方法不是从内部修改ORBSLAM2源码以获取稠密点云,而是先从ZED2 sdk获取以摄像头坐标系为描述的三维点云/作为点云地图的一个子集,然后融合IMU与ORB_SLAM2进行实时定位,通过 ...
- iOS系列 基础篇 05 视图鼻祖 - UIView
iOS系列 基础篇 05 视图鼻祖 - UIView 目录: UIView“家族” 应用界面的构建层次 视图分类 最后 在Cocoa和Cocoa Touch框架中,“根”类时NSObject类.同样, ...
- GSM Sniffing入门之软件篇:GSMTAP抓取与SMS(Short Message Service)
重点介绍如何利用50元左右的设备,抓包并还原SMS短信内容: ps:研究GSM Sniffing纯属个人兴趣,能抓SMS报文只是捡了个明文传输的漏子,切勿用于非法用途.就像sylvain说的,osmo ...
- FSG压缩壳和ImportREC的使用 - 脱壳篇05
FSG压缩壳和ImportREC的使用 - 脱壳篇05 让编程改变世界 Change the world by program FSG这个壳可以说是有点儿不守妇道,尼玛你说你一个压缩壳就实现压缩功能得 ...
- [知乎]老狼:深入PCI与PCIe之二:软件篇
深入PCI与PCIe之二:软件篇 https://zhuanlan.zhihu.com/p/26244141 我们前一篇文章(深入PCI与PCIe之一:硬件篇 - 知乎专栏)介绍了PCI和PCIe的硬 ...
- 智能家居-3.基于esp8266的语音控制系统(软件篇)
智能家居-1.基于esp8266的语音控制系统(开篇) 智能家居-2.基于esp8266的语音控制系统(硬件篇) 智能家居-3.基于esp8266的语音控制系统(软件篇) 赞赏支持 QQ:505645 ...
- OA办公软件篇(一)—组织架构
OA办公软件篇(一)-组织架构 背景 作用 迭代历程 具体实现 写在最后 背景 在说组织架构之前,我们先来说说OA本身. 百度百科解释OA为:办公自动化(Office Automation,简称O ...
- OA办公软件篇(二)—权限管理
权限管理的背景 权限管理的作用 迭代历程 关键名词释义 权限管理模型 具体实现 写在最后 权限管理的背景 在OA办公软件篇(一)-组织架构一文中,我们说到组织架构是软件系统的权限体系的重要搭建依据 ...
- OA办公软件篇(三)—审批流
背景 作用 迭代历程 具体实现 写在最后 背景 在前面两篇文章中,我们分别讲了组织架构和权限管理,今天我们来讲一个跟组织架构关系比较密切的功能-审批流. 审批流,通俗来说就是一个完整的审批流程,是 ...
随机推荐
- mysql 单表下的字段操作
如下只介绍单表的添加.更新.删除.查询表结构操作,查询数据操作范围太大用单独的篇幅来讲解: 查看表结构 desc test_tb; Insert 插入数据 插入 = 添加 为表中指定的字段插入数据 C ...
- a标签不能继承父级的颜色
<!DOCTYPE html> <html> <head> <meta charset="UTF-8"> <title> ...
- hive学习笔记之一:基本数据类型
欢迎访问我的GitHub https://github.com/zq2599/blog_demos 内容:所有原创文章分类汇总及配套源码,涉及Java.Docker.Kubernetes.DevOPS ...
- visual studio 2019 + cmake 实现windows linux跨平台开发环境搭建
visual studio 2019开始支持cmake跨平台开发. 以前cmake项目需要先生成vs项目,然后vs直接使用vs项目开发.现在可以直接用vs2019创建或打开cmake项目. 使用vis ...
- ES6学习笔记(3)- 对象的功能性扩展
一.什么是对象字面量 对象字面量就是创建对象(Object)的一种简单容易理解的方式,再通俗点就是所谓的键值对的集合.举个简单的例子: let book = { name: 'JavaScript', ...
- SpringBoot入门学习看这一篇就够了
1.SpringBoot是什么? SpringBoot是一套基于Spring框架的微服务框架. 2.为什么需要SpringBoot 由于Spring是一个轻量级的企业开发框架,主要的功能就是用于整合和 ...
- 给Winform中的TabControl添加更现代的拖拽功能
上周接到一个开发任务,大致是允许APP中的Tab拖动以成为一个独立Tab,脱离之前的TabControl,就是现在Web拖动标签页创建新窗口的功能,现在浏览器必备的功能,应该很简单,然而我司采用的Do ...
- MySQL基础知识:MySQL Connection和Session
在connection的生命里,会一直有一个user thread(以及user thread对应的THD)陪伴它. Connection和Session概念 来自Stackoverflow的一个回答 ...
- Java8 Stream 中 List 转 Map 问题总结
在使用 Java 的新特性 Collectors.toMap() 将 List 转换为 Map 时存在一些不容易发现的问题,这里总结一下备查. 空指针风险 java.lang.NullPointerE ...
- ASP.NET Core与Redis搭建一个简易分布式缓存
本文主要介绍了缓存的概念,以及如何在服务器内存中存储内容.今天的目标是利用IDistributedCache来做一些分布式缓存,这样我们就可以横向扩展我们的web应用程序. 在本教程中,我将使用Re ...