iMX6UL配置MCP2515模块(SPI转CAN)——基于迅为iTOP-iMX6UL开发板
写在前面
在文章“嵌入式Linux的CAN总线配置——基于迅为iTOP-4412开发板”中我给4412开发板配置了SPI转CAN模块,使用的是不带设备树的内核。在本篇文章中,要使用支持设备树的内核,给iMX6UL开发板配置MCP2515。
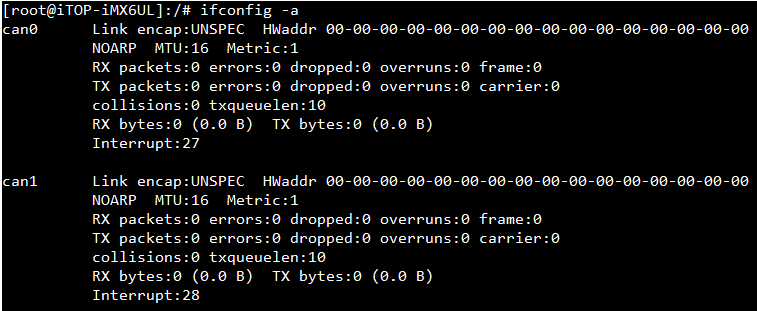
打开iMX6UL开发板的串口终端,输入命令ifconfig -a,可以看到CAN0和CAN1两个设备,这是iMX6UL芯片自带的两路FlexCAN。
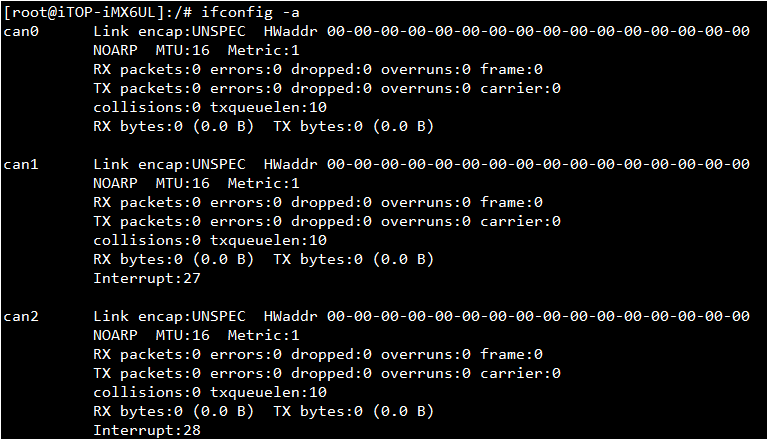
在完成配置MCP2515模块之后,输入命令ifconfig -a,可以看到三路CAN,其中CAN1和CAN2是iMX6UL芯片自带的两路FlexCAN,而CAN0便是通过MCP2515实现的SPI转CAN。
硬件连接
将SPI转CAN模块插到iMX6UL开发板的GPIO插槽上。
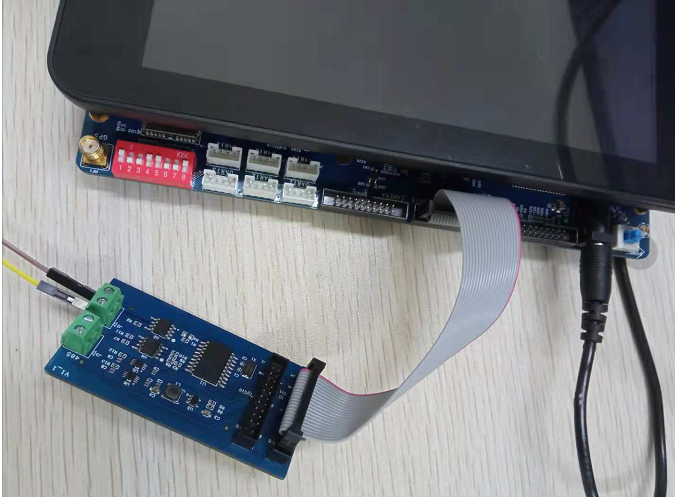
需要注意的是,该GPIO插槽中的PIN脚没有支持ECSPI的,所以我们在这里用的SPI是把相应的PIN脚用软件模拟出的SPI。
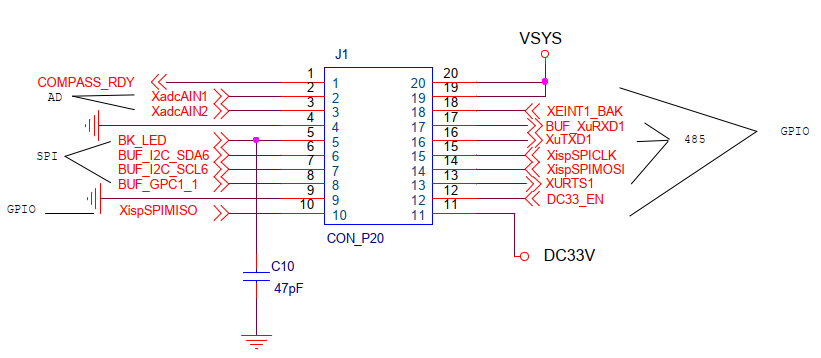
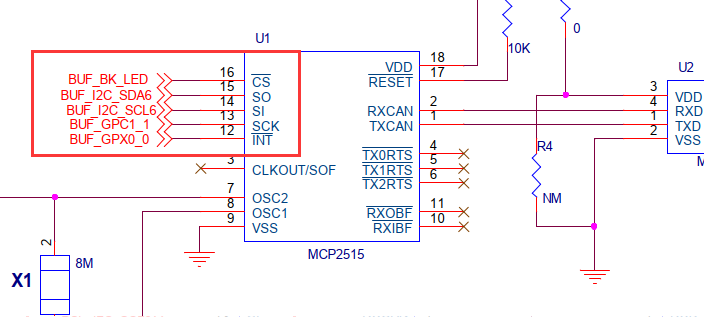
通过查看GPIO插槽和SPI转CAN的原理图,可以知道MCP2515和GPIO插槽上PIN脚的对应关系。共需要五个PIN脚,分别是SPI_SCK,SPI_CS,SPI_MOSI,SPI_MISO,以及中断引脚MCP2515_INT。
再查看核心板的文档,可以获得MCP2515的这五个脚和iMX6UL芯片PIN脚的对应关系,如下表所示。
| MCP2515 | iMX6UL |
|---|---|
| SPI_SCK | GPIO5_IO11 |
| SPI_CS | GPIO1_IO09 |
| SPI_MOSI | GPIO5_IO10 |
| SPI_MISO | GPIO3_IO07 |
| MCP2515_INT | GPIO1_IO31 |
# 修改设备树
进入内核目录,使用命令`vim Documentation/devicetree/bindings/net/can/microchip,mcp251x.txt`打开关于MCP2515的设备树帮助文档。
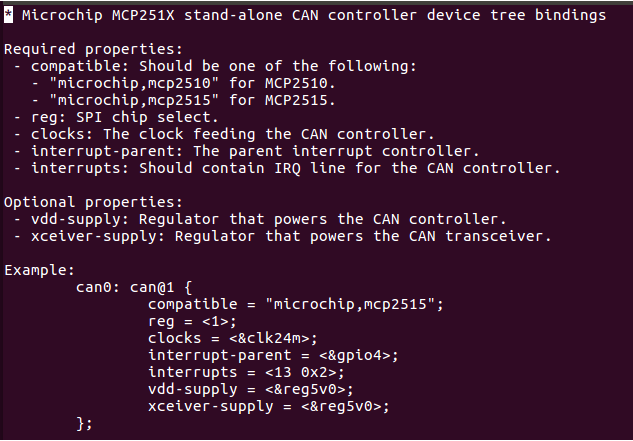
可以根据该帮助文档的提示信息来仿写一个CAN节点。
再开一个终端,进入内核目录,使用命令vim arch/arm/boot/dts/imx6ul-14x14-evk_emmc.dts打开开发板对应的设备树文件(设备树文件可能会因开发板型号的不同而不同,请打开你的开发板对应的设备树文件)。在设备树的根节点下,可以看到一个名为“spi4”的设备节点,这个节点对应的就是模拟SPI。
①首先在“spi4”节点前增加一个时钟节点,如下图所示。
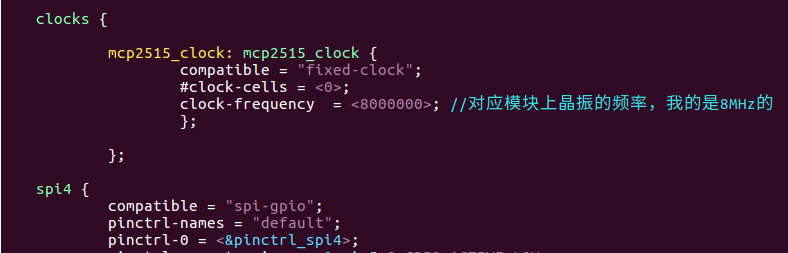
clocks {
mcp2515_clock: mcp2515_clock {
compatible = "fixed-clock";
#clock-cells = <0>;
clock-frequency = <8000000>; //对应模块上晶振的频率,我的是8MHz的
};
};
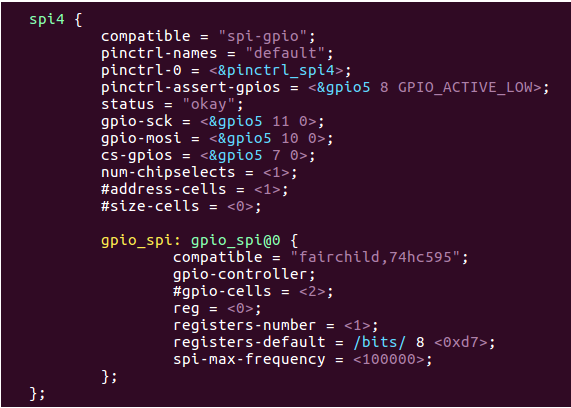
②然后对“spi4”节点做修改,并删除它的子节点“gpio_spi”,然后根据帮助文档自己写一个“can0”节点作为“spi4”节点的子节点,如下图所示(注释部分为所做的修改或添加)。
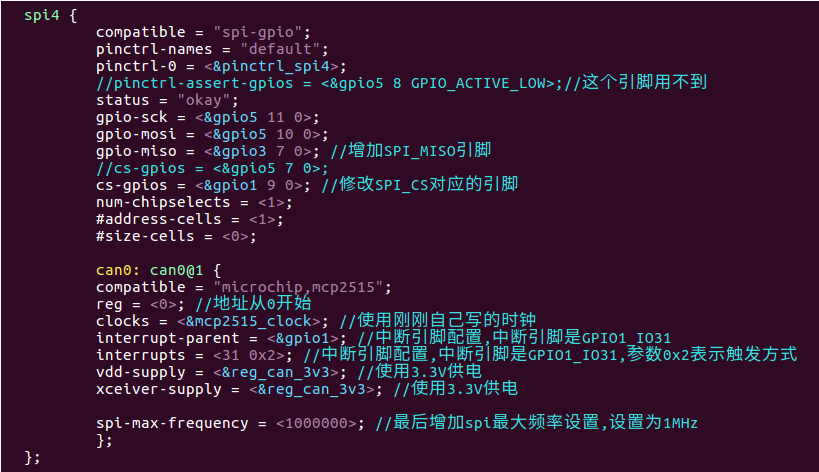
spi4 {
compatible = "spi-gpio";
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_spi4>;
//pinctrl-assert-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>;//这个引脚用不到
status = "okay";
gpio-sck = <&gpio5 11 0>;
gpio-mosi = <&gpio5 10 0>;
gpio-miso = <&gpio3 7 0>; //增加SPI_MISO引脚
//cs-gpios = <&gpio5 7 0>;
cs-gpios = <&gpio1 9 0>; //修改SPI_CS对应的引脚
num-chipselects = <1>;
#address-cells = <1>;
#size-cells = <0>;
can0: can0@1 {
compatible = "microchip,mcp2515";
reg = <0>; //地址从0开始
clocks = <&mcp2515_clock>; //使用刚刚自己写的时钟
interrupt-parent = <&gpio1>; //中断引脚配置,中断引脚是GPIO1_IO31
interrupts = <31 0x2>; //中断引脚配置,中断引脚是GPIO1_IO31,参数0x2表示触发方式
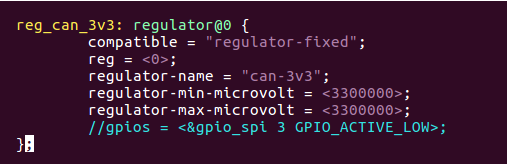
vdd-supply = <®_can_3v3>; //使用3.3V供电
xceiver-supply = <®_can_3v3>; //使用3.3V供电
spi-max-frequency = <1000000>; //最后增加spi最大频率设置,设置为1MHz
};
};
③找到节点“pinctrl_spi4”,在该节点中添加SPI_CS和SPI_MISO相关的引脚,如下图所示(有注释的部分为所做的添加)。
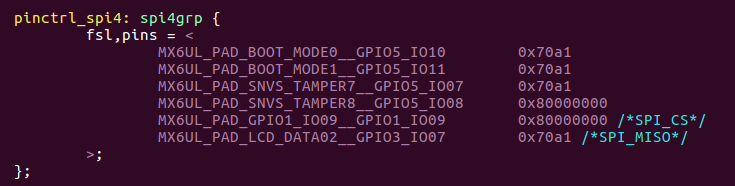
pinctrl_spi4: spi4grp {
fsl,pins = <
MX6UL_PAD_BOOT_MODE0__GPIO5_IO10 0x70a1
MX6UL_PAD_BOOT_MODE1__GPIO5_IO11 0x70a1
MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x70a1
MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x80000000
MX6UL_PAD_GPIO1_IO09__GPIO1_IO09 0x80000000 /*SPI_CS*/
MX6UL_PAD_LCD_DATA02__GPIO3_IO07 0x70a1 /*SPI_MISO*/
>;
};
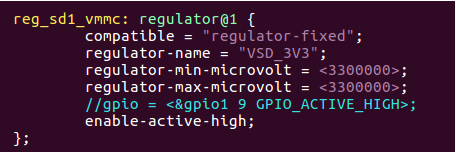
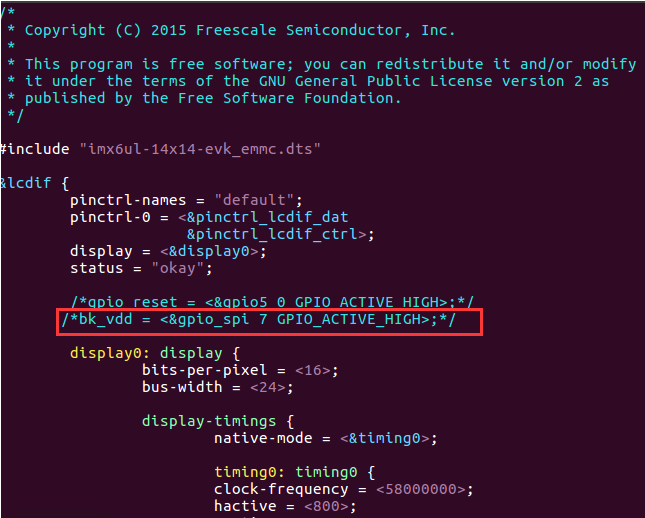
④搜索“gpio1 9”和“GPIO1_IO09”,注释掉设备树文件自带的和GPIO1_IO09引脚相关的内容(因为这个脚被我们用做SPI_CS了),如下图所示。

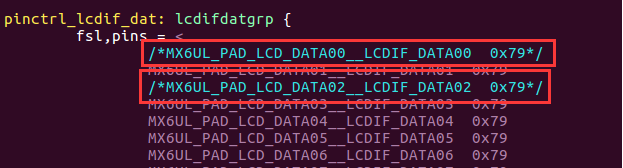
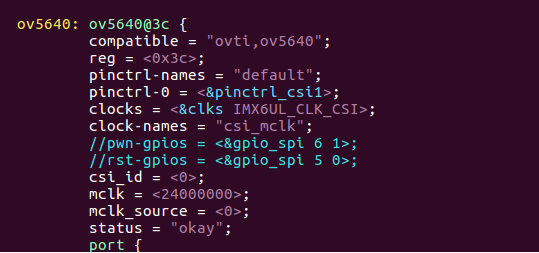
⑤搜索“I2C2_SCL”、“LCD_DATA00”、“LCD_DATA02”,注释掉设备树原有的相关语句,如下图所示。

⑥搜索“spi_gpio”,把所有和“spi_gpio”相关的语句全部注释掉,否则会编译出错(因为节点“spi_gpio”已经被删除了),如下图所示。
⑦然后分别进入设备树文件“arch/arm/boot/dts/topeet_emmc_4_3.dts”、“arch/arm/boot/dts/topeet_emmc_5_0.dts”、“arch/arm/boot/dts/topeet_emmc_7_0.dts”、“arch/arm/boot/dts/topeet_emmc_9_7.dts”、“arch/arm/boot/dts/topeet_emmc_10_1.dts”、“arch/arm/boot/dts/topeet_emmc_1024x600.dts”这六个设备树文件,删除“gpio_spi”相关的语句,如下图所示。
裁剪内核
进入内核根目录下,使用命令export ARCH=arm,指定架构。然后使用命令make menuconfig进入内核裁剪界面。
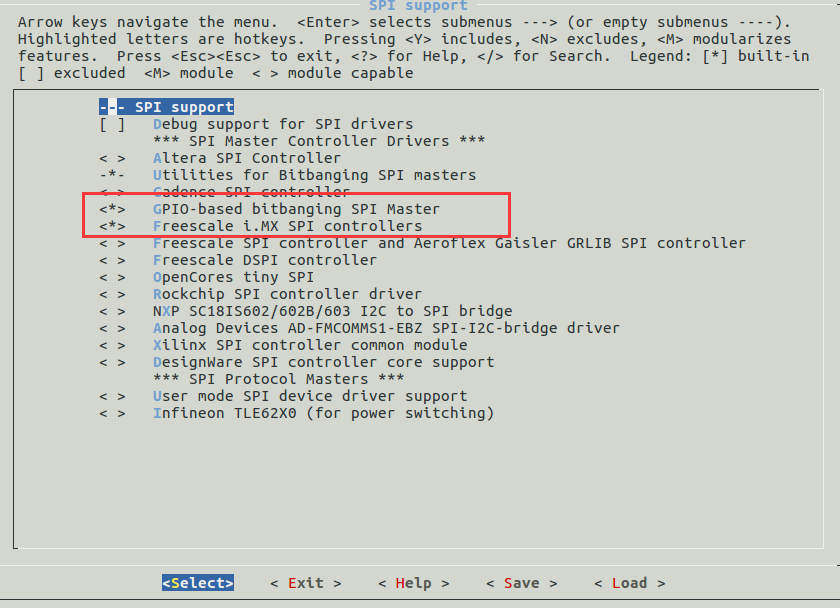
①进入“Device Drivers--->SPI support--->”,选中“GPIO-based bitbanging SPI Master”和“Freescale i.MX SPI controllers ”
②然后进入“Networking support--->CAN bus subsystem support--->CAN Device Drivers--->CAN SPI interfaces--->”,选中“Microchip MCP251x SPI CAN controllers”。

保存,并退出。
编译和烧写
编译内核和设备树,并将编译出来的内核和设备树文件烧写到开发板中。重启设备,MCP2515设备便可以使用了。
目前存在的问题
每次设备重启后,第一次使用命令ifconfig can0 up启动MCP2515会提示没有该设备,再启动一次就能正常启动了。
设备树源码在这里,下载下来后覆盖掉“arch/arm/boot/dts/”路径下相应的dts文件即可。
iMX6UL配置MCP2515模块(SPI转CAN)——基于迅为iTOP-iMX6UL开发板的更多相关文章
- 基于迅为-i.MX6Q开发板制作镜像方法
在“/home/imx6”目录(在前面编译 android 系统的时候新建过这个目录,如果没有可以自己新建一个)下,使用命令“mkdir minilinux/”新建 minilinux 目录,使用命令 ...
- 【基于mini2440开发板的交叉编译环境及内核树配置.
在学习linux驱动开发过程中,交叉编译环境的配置及内核树的生成无疑是对linux不是十分了解的新人面前的一堵墙.高高大大的墙...笔者在初探这一方向时,就在这2个问题上苦恼了很久.查阅无数资料,大多 ...
- 分布式文件系统 - FastDFS 配置 Nginx 模块及上传测试
也不说废话,直接干 上一篇 分布式文件系统 - FastDFS 在 CentOS 下配置安装部署 中安装了 FastDFS 后,并配置启动了 Tracker 和 Storage 服务,已经可以上传文件 ...
- springboot2.0 JPA配置自定义repository,并作为基类BaseRepository使用
springboot2.0 JPA配置自定义repository,并作为基类BaseRepository使用 原文链接:https://www.cnblogs.com/blog5277/p/10661 ...
- FastDFS 配置 Nginx 模块,并实现分布式同步-Linux
1.搭建虚拟机 a.复制虚拟机文件 首先复制我们之前安装好的fastdfs虚拟机,因为我们现在要设置它的IP为21,改名为CentOS-fastdfs - 21. b.设置网络 生成新的MAC地址 设 ...
- Maven最佳实践 划分模块 配置多模块项目 pom modules
所有用Maven管理的真实的项目都应该是分模块的,每个模块都对应着一个pom.xml.它们之间通过继承和聚合(也称作多模块,multi-module)相互关联.那么,为什么要这么做呢?我们明明在开发一 ...
- maven 配置多模块项目 pom modules
所有用Maven管理的真实的项目都应该是分模块的,每个模块都对应着一个pom.xml.它们之间通过继承和聚合(也称作多模块,multi-module)相互关联.那么,为什么要这么做呢?我们明明在开发一 ...
- Arduino 基于 ESP8266 配置WIFI模块
Arduino 基于 ESP8266 配置WIFI模块 使用ESP8266作为服务器,使用浏览器访问该服务器,从而控制LED灯 选择 [文件]->[示例]->[ESP8266WIFI]-& ...
- vsftpd架设(配置pam模块)
Vsftpd 是很安全的ftp软件 VSFTPD的目录结构 /usr/sbin/vsftpd: VSFTPD的可执行文件 /etc/rc.d/init.d/vsftpd:启动脚本 /etc/vsftp ...
随机推荐
- uTools电脑软件快速启动工具
uTools电脑软件快速启动工具 http://www.autoahk.com/archives/16112 https://gitee.com/weiyunw ...
- 3D网页小实验-基于多线程和精灵动画实现RTS式单位行为
一.实验目的: 1.在上一篇的"RTS式单位控制"的基础上添加逻辑线程,为每个单位实现ai计算: 2.用精灵动画为单位的行为显示对应的动作效果. 二.运行效果: 1.场景中的单位分 ...
- 字节跳动、快手等大厂Android面试刨根问底之内存泄露篇
现在快手字节跳动等公司都在大量招人,薪资优厚,但是想进去却没那么简单,面过的人都知道,这些公司的面试官巴不得把你会的东西都给你挖出来,所以要深入复习知识点,让自己耐问一点.一下是针对内存泄露真实面试过 ...
- dython:Python数据建模宝藏库
尽管已经有了scikit-learn.statsmodels.seaborn等非常优秀的数据建模库,但实际数据分析过程中常用到的一些功能场景仍然需要编写数十行以上的代码才能实现. 而今天要给大家推荐的 ...
- HTML5(十一)——WebSocket 基础教程
一.为什么要学 WebSocket? websocket 是 HTML5 提供的一种长链接双向通讯协议,使得客户端和服务器之间的数据交换更简单,允许服务端主动向客户端推送数据,并且客户端与服务端只需连 ...
- 22javascript笔记(2)
JavaScript 1.js事件和作用域 js事件:html页面中每一个元素都可以产生某些触发js函数的事件.这些事件是可以被js侦测到的一种行为,并且js程序能应对这些事件. 常见的html事件 ...
- WPF 饼状图,柱形图,折线图 (3 饼状图)
网址:https://www.cnblogs.com/CSSZBB/p/12746214.html 饼状图相对来说复杂一些.因为需要计算很多坐标,线来看下这个列子. 圆首先想到Ellipse.但是El ...
- C++进阶—>带你理解多字节编码与Unicode码
参考网址:https://blog.csdn.net/u011028345/article/details/78516320 多字节字符与宽字节字符 char与wchar_t 我们知道C++基本数据类 ...
- C++11 unique_ptr智能指针详解
在<C++11 shared_ptr智能指针>的基础上,本节继续讲解 C++11 标准提供的另一种智能指针,即 unique_ptr 智能指针. 作为智能指针的一种,unique_ptr ...
- qt 中的自定义pushbutton