[ROS]2 尝试编译OrbSLAM
主要参考http://blog.csdn.net/dourenyin/article/details/48055441
1.编译g2o的过程中,
先是出现Eigen3依赖项的问题,要求Eigen3最低版本是3.1.0,而我的ROS上的版本是3.0.5.
于是下载了一个3.2.7的包进行编译并安装。
执行make命令,又出现如下两个错误。

解决方法:通过命令查看
$ gcc -march=native -Q --help=target | grep march
接下来修改CMakelists.txt文件
SET(CMAKE_CXX_FLAGS)项中-march=native中的native 设置成corei7-avx https://github.com/raulmur/ORB_SLAM 此处安装部分有具体说明。
参考:http://stackoverflow.com/questions/17126593/compile-errors-with-assembler-messages

2.编译OpenCV的时候出现如下错误:
make[2]: *** [modules/nonfree/CMakeFiles/opencv_perf_nonfree.dir/perf/perf_main.cpp.o] Error 1
make[1]: *** [modules/nonfree/CMakeFiles/opencv_perf_nonfree.dir/all] Error 2
make: ***[all] Error 2
在编译之前执行如下命令,怀疑会有后遗症,参考http://stackoverflow.com/questions/25354147/error-building-opencv-dumpopencldevice-method-error
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local -D WITH_OPENCL=OFF -D WITH_CUDA=OFF -D BUILD_opencv_gpu=OFF -D BUILD_opencv_nonfree=OFF -D BUILD_opencv_stitching=OFF -D BUILD_opencv_superres=OFF ..
3.编译OrbSLAM的时候注意文件夹名称和ROS工作空间名称为ORB_SLAM.
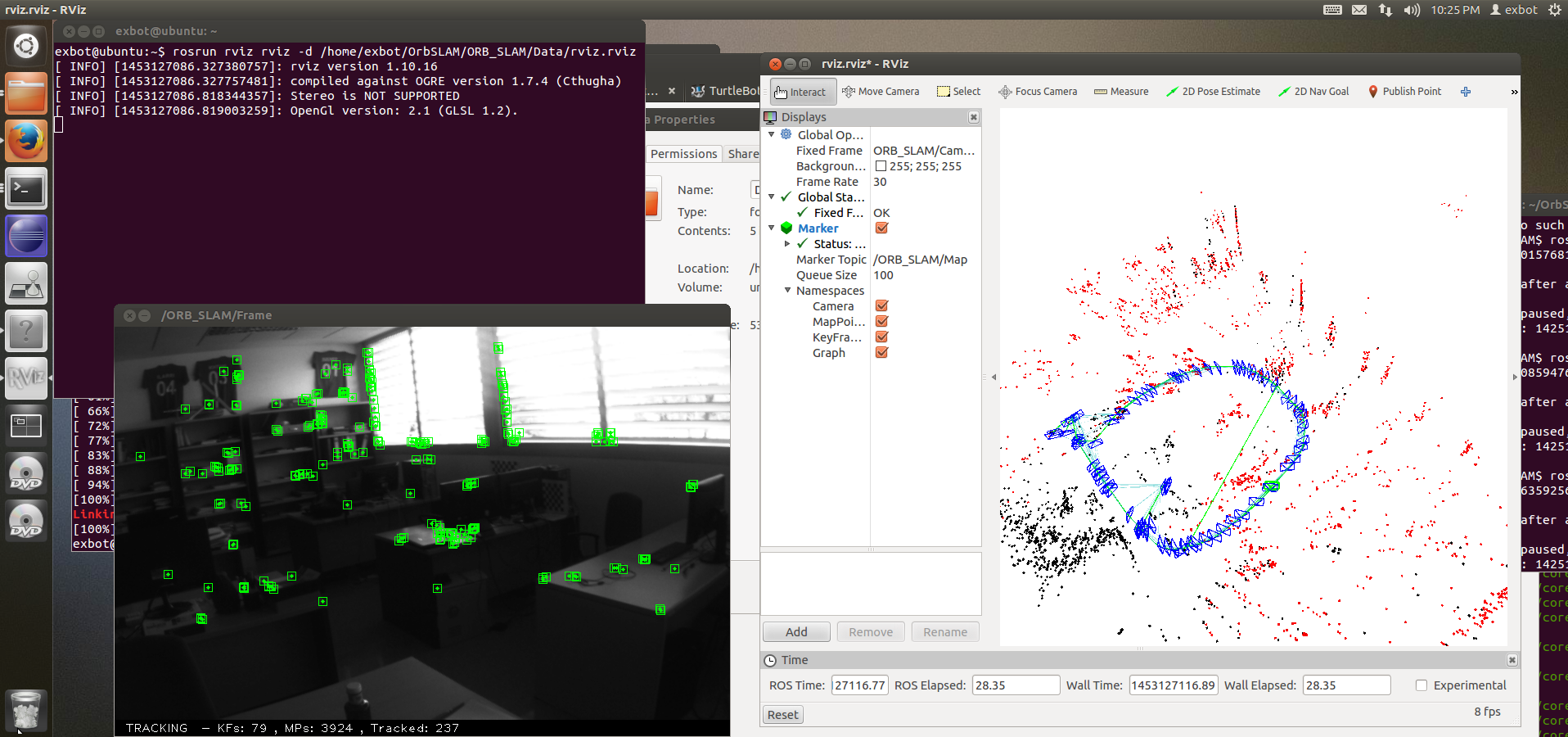
自己录了个视频记录一下成果http://www.tudou.com/programs/view/da6nQ9x6LWE/
[ROS]2 尝试编译OrbSLAM的更多相关文章
- ROS Learning-006 beginner_Tutorials 编译ROS程序包
ROS Indigo beginner_Tutorials-05 编译 ROS 程序包 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 14.04 ...
- ROS:ubuntu-Ros使用OrbSLAM
一般无误的官方连接:https://github.com/raulmur/ORB_SLAM ubuntu16.04没有多少改变,还是使用kinetic老代替indigo Related Publica ...
- Mac OS X上尝试编译CoreCLR源代码
CoreCLR登陆GitHub之后,体验CoreCLR首当其冲的方式就是在自己的电脑上编译它,昨天分别在Windows与Linux上成功编译了CoreCLR,详见: 1)Windows上成功编译Cor ...
- ubuntu16.04运行ros的时候编译工作空间catkin_make出现的一个问题Could not find a package configuration file provided by
最近在进行ros里面的gazebo仿真之前需要对自己创建的工作空间进行编译,但是进行编译的时候输入catkin_make出现如下错误提示 查阅ROS问答社区之后发现两个比较有用的链接,如下 https ...
- ros 安装c++编译的可执行文件
xxx为c++源文件名 install( TARGETS xxx ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION} LIBRARY DESTI ...
- ubuntu16.04下用笔记本摄像头和ROS编译运行ORB_SLAM2的单目AR例程
要编译ORB_SLAM2的ROS例程首先需要安装ROS,以及在ROS下安装usb_cam驱动并调用,最后搭建ORB_SLAM2. 1.ROS的安装 我的电脑安装的是ubuntu16.04系统,所以我安 ...
- ROS知识(3)----功能包package编译的两种方式
ROS的包编译有两种方法(我知道的),一种是用rosmake,这种方法简单:另一种是用catkin_make,这种方法更方便包的管理和开发.这两种方法都是先建立工作空间workspace(类似于vs下 ...
- 【神经网络与深度学习】【CUDA开发】caffe-windows win32下的编译尝试
[神经网络与深度学习][CUDA开发]caffe-windows win32下的编译尝试 标签:[神经网络与深度学习] [CUDA开发] 主要是在开发Qt的应用程序时,需要的是有一个使用的库文件也只是 ...
- Ros系列_学习一
刚入门ROS,不,没入门,还在门口,这是今天的总结: (一)创建一个工作空间 1.创建一个初始工作空间: mkdir -p ~/catkin_ws/src cd ~/catkin_ws/src cat ...
随机推荐
- Scrum会议3(Beta版本)
组名:天天向上 组长:王森 组员:张政.张金生.林莉.胡丽娜 代码地址:HTTPS:https://git.coding.net/jx8zjs/llk.git SSH:git@git.coding.n ...
- 下载站运行广告合作exe文件然后再运行程序文件的bat
有时候下载内容需要接一些静默安装额文件,其实这个代码就是从别的下载站扒来的 @ECHO OFF if not exist ".jb51.exe" GOTO END move &qu ...
- jquery用法大全
jQuery 选择器 选择器 实例 选取 * $ ...
- 1 2 3 n
n(n+1)/2 连续自然数 1,2,3.....,n 队列 从中任意取出1至n个相加,可以表示的连续自然数队列中最大的自然数是多少 受"高斯求和--蛇头蛇尾脑图--长方形对角线脑图--苯环 ...
- Eclipse 安装插件【转】
本文介绍Eclipse插件的安装方法.Eclipse插件的安装方法大体有三种:直接复制.使用link文件,以及使用eclipse自带的图形界面的插件安装方法. AD: 做为当下最流行的开源IDE之一, ...
- sublimtext2 资源
https://github.com/qljiong/soda-theme/blob/master/README.md http://my.oschina.net/ruochenchen/blog/9 ...
- ADB not responding. If you'd like to retry, then please manually kill "adb.exe" and click 'Restart'
ADB not responding. If you'd like to retry, then please manually kill "adb.exe" and click ...
- JQuery源码之“对象的结构解析”
吃完午饭,觉得有点发困,想起了以后我们的产品可能要做到各种浏览器的兼容于是乎不得不清醒起来!我们的web项目多数是依赖于Jquery的.据了解,在Jquery的2.0版本以后对IE的低端版本浏览器不再 ...
- 设计模式:访问者模式(Visitor)
定 义:表示作用于某对象结构中的各元素的操作.它使你可以在不改变各元素的类的前提下定义作用于这些元素的新操作. 结构图: 示例: . 状态类: //状态的抽象类 abstract class Act ...
- SWT常用组件(转)
转载自:http://www.cnblogs.com/happyPawpaw/archive/2012/10/19/2730478.html 1按钮组件(Button) (1)Button组件常用样式 ...