【物联网智能网关-17】.NET Micro Framework之MDK C++二次开发
.NET Micro Framework虽然好学易用,但是在一些需要实时,需要高性能的应用领域,却有些勉为其难。毕竟.NET Micro Framework上层应用程序由底层CLR(TinyCLR)解释执行,执行效率被打个折扣是在所难免的。
美国GHI公司(国外.NET Micro Framework硬件产品主要生厂商)为此提供了一个称为RLP方案(https://www.ghielectronics.com/docs/50/rlp-enhanced)。可以让.NET Micro Framework的应用程序调用MDK编写的C++程序,主要是解决性能问题,把一些比较运行比较耗时的代码采用C++完成,功能相对简单。
而我们所提供的方案和他们不同,我们是通过流式驱动的方式用MDK开发C++程序。用户程序采用标准的流式驱动接口进行相关调用。并且流式驱动提供事件机制,底层和上层可以通过事件进行交互。
另外就是为MDK C++程序提供了丰富的.NET Micro Framework PAL层接口,可以让用户随心所欲地开发出功能强大的程序。
在此之前我已经写过两篇相关的文章,用户可以先行了解一下:《.NET Micro Framework动态调用C/C++底层代码(原理篇)》和《【物联网智能网关-11】流式驱动之用户驱动(MDK C++开发)》。
和上一篇文章介绍的功能函数相比,又扩展了一些比较实用的功能,比如I2C、SPI接口,底层中断打开关闭,HAL_COMPLETION、HAL_CONTINUATION类似底层多线程支持和中断程序用户态执行,功能函数由原来的61个扩展到了80个。具体功能接口如下:
struct IGeneralStream_Function
{
INT32 iParam1;
LPCSTR sParam1;
//---
void (*Notice_GenerateEvent)(UINT32 data1, UINT32 data2);
void (*lcd_printf)(char const * format,...);
void (*debug_printf)(char const* format, ... );
void (*HAL_Time_Sleep_MicroSeconds_InterruptEnabled)(UINT32 uSec);
UINT32 (*Events_WaitForEvents)(UINT32 WakeupSystemEvents, UINT32 Timeout_Milliseconds);
void (*disable_interrupts)();
void (*enable_interrupts)();
void* (*private_malloc)(size_t len);
void (*private_free)( void* ptr);
//--- lock ---
BOOL (*DISABLE_INTERRUPTS)(void* context);
BOOL (*ENABLE_INTERRUPTS)(void* context);
//HAL_COMPLETION/HAL_CONTINUATION
UINT32 (*HAL_COMPLETION_Initialize)(HAL_CALLBACK_FPN EntryPoint,void* Argument);
void (*HAL_COMPLETION_Uninitialize)(UINT32 handle);
void (*HAL_COMPLETION_EnqueueDelta)(UINT32 handle,UINT32 uSec);
UINT32 (*HAL_CONTINUATION_Initialize)(HAL_CALLBACK_FPN EntryPoint,void* Argument);
void (*HAL_CONTINUATION_Uninitialize)(UINT32 handle);
void (*HAL_CONTINUATION_Enqueue)(UINT32 handle);
//--- mem ---
int (*hal_snprintf)( char* buffer, size_t len, const char* format, ... );
int (*hal_stricmp)( const char * dst, const char * src );
int (*hal_strncmp_s)( const char* str1, const char* str2, size_t num );
size_t (*hal_strlen_s)(const char * str);
void *(*memcpy)(void * dst, const void * src, size_t len);
void *(*memset)( void * dst, int value, size_t len );
//--- Flash ---
INT32 (*YFSoft_Flash_Erase)( UINT32 address, UINT32 count);
INT32 (*YFSoft_Flash_Read)( UINT32 address, UINT32 count,UINT8 *buffer);
INT32 (*YFSoft_Flash_Write)( UINT32 address, UINT32 count,UINT8 *buffer);
//--- GPIO ---
void (*CPU_GPIO_DisablePin)(GPIO_PIN Pin, GPIO_RESISTOR ResistorState, UINT32 Direction, GPIO_ALT_MODE AltFunction);
BOOL (*CPU_GPIO_EnableInputPin)(GPIO_PIN Pin, BOOL GlitchFilterEnable, GPIO_INTERRUPT_SERVICE_ROUTINE ISR, GPIO_INT_EDGE IntEdge, GPIO_RESISTOR ResistorState);
void (*CPU_GPIO_EnableOutputPin)(GPIO_PIN Pin, BOOL InitialState);
BOOL (*CPU_GPIO_GetPinState)(GPIO_PIN Pin);
void (*CPU_GPIO_SetPinState)(GPIO_PIN Pin, BOOL PinState);
//--- TIMER ---
BOOL (*CPU_TIMER_Initialize)(UINT32 timer, UINT32 ARR,UINT16 PSC,HAL_CALLBACK_FPN ISR, void* ISR_Param );
BOOL (*CPU_TIMER_Uninitialize)(UINT32 timer );
void (*CPU_TIMER_Start)(UINT32 timer);
void (*CPU_TIMER_Stop)(UINT32 timer);
UINT32 (*CPU_TIMER_GetState)(UINT32 timer);
void (*CPU_TIMER_SetState)(UINT32 timer,UINT32 state);
//--- USART ---
BOOL (*USART_Initialize)( int ComPortNum, int BaudRate, int Parity, int DataBits, int StopBits, int FlowValue );
BOOL (*USART_Uninitialize)( int ComPortNum );
int (*USART_Write)( int ComPortNum, const char* Data, size_t size );
int (*USART_Read)( int ComPortNum, char* Data, size_t size );
BOOL (*USART_Flush)( int ComPortNum );
int (*USART_BytesInBuffer)( int ComPortNum, BOOL fRx );
void (*USART_DiscardBuffer)( int ComPortNum, BOOL fRx );
//--- AD/DA ---
BOOL (*DA_Initialize)( ANALOG_CHANNEL channel, INT32 precisionInBits );
void (*DA_Write)( ANALOG_CHANNEL channel, INT32 level );
BOOL (*AD_Initialize)( ANALOG_CHANNEL channel, INT32 precisionInBits );
INT32 (*AD_Read)( ANALOG_CHANNEL channel );
//--- PWM ----
BOOL (*PWM_Initialize)( PWM_CHANNEL channel );
BOOL (*PWM_Uninitialize)( PWM_CHANNEL channel );
BOOL (*PWM_ApplyConfiguration)( PWM_CHANNEL channel, GPIO_PIN pin, UINT32& period, UINT32& duration, PWM_SCALE_FACTOR &scale, BOOL invert );
BOOL (*PWM_Start)( PWM_CHANNEL channel, GPIO_PIN pin );
void (*PWM_Stop)( PWM_CHANNEL channel, GPIO_PIN pin );
GPIO_PIN (*PWM_GetPinForChannel)( PWM_CHANNEL channel );
//--- SPI ----
BOOL (*CPU_SPI_nWrite16_nRead16)( const SPI_CONFIGURATION& Configuration, UINT16* Write16, INT32 WriteCount, UINT16* Read16, INT32 ReadCount, INT32 ReadStartOffset );
BOOL (*CPU_SPI_nWrite8_nRead8)( const SPI_CONFIGURATION& Configuration, UINT8* Write8, INT32 WriteCount, UINT8* Read8, INT32 ReadCount, INT32 ReadStartOffset );
//--- I2C ----
BOOL (*I2C_Initialize)();
BOOL (*I2C_Uninitialize)();
BOOL (*I2C_Execute)(UINT16 address,UINT8 *inBuffer,int inCount,UINT8 *outBuffer,int outCount,UINT32 clockRateKhz,int timeout);
//--- TinyGUI ----
void (*LCD_ClearEx)(UINT32 color);
void (*LCD_SetPixel)(INT32 x,INT32 y,UINT32 color);
UINT32 (*LCD_GetPixel)(INT32 x,INT32 y);
void (*LCD_DrawLine)(INT32 x1,INT32 y1,INT32 x2,INT32 y2,UINT32 color);
void (*LCD_DrawRectangle)(INT32 x,INT32 y,INT32 width,INT32 height,UINT32 color);
void (*LCD_DrawEllipse)(INT32 x,INT32 y,INT32 width,INT32 height,UINT32 color);
void (*LCD_DrawImage)(INT32 x,INT32 y,UINT8 *bytData);
void (*LCD_DrawImageEx)(INT32 x,INT32 y,UINT8 *bytData,UINT32 MaskColor);
void (*LCD_DrawString)(INT32 x,INT32 y,LPCSTR s,UINT32 color);
void (*LCD_DrawStringEx)(INT32 x,INT32 y,UINT32 color,UINT8 *fontdata,int width,int height,int count); //2012-08-06
void (*LCD_FillRectangle)(INT32 x,INT32 y,INT32 width,INT32 height,UINT32 color);
void (*LCD_FillEllipse)(INT32 x,INT32 y,INT32 width,INT32 height,UINT32 color);
void (*LCD_GetFrameBufferEx)(UINT8 *bytData,UINT32 offset,UINT32 size);
void (*LCD_SuspendLayout)();
void (*LCD_ResumeLayout)();
};
下面简单介绍一下驱动开发步骤。
1、 在MDK 4.xx版本创建一个新项目,添加generalstream.h头文件,然后再添加模板文件UserDriver.cpp。如下图所示:
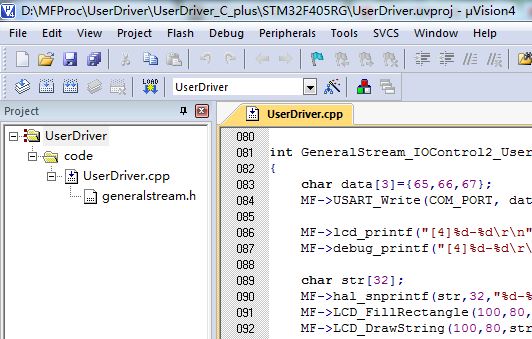
2、 选定MCU类型,可以根据实际硬件选择STM32F103/STM32F207/STM32F407/STM32F405。
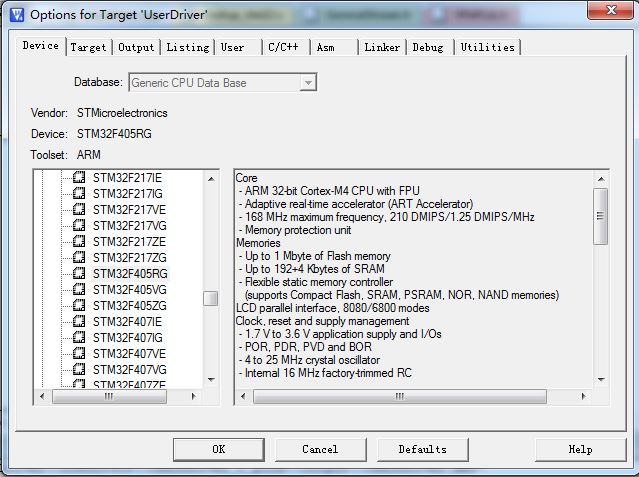
(凌霄智能终端采用的芯片就是STM32F405RG)
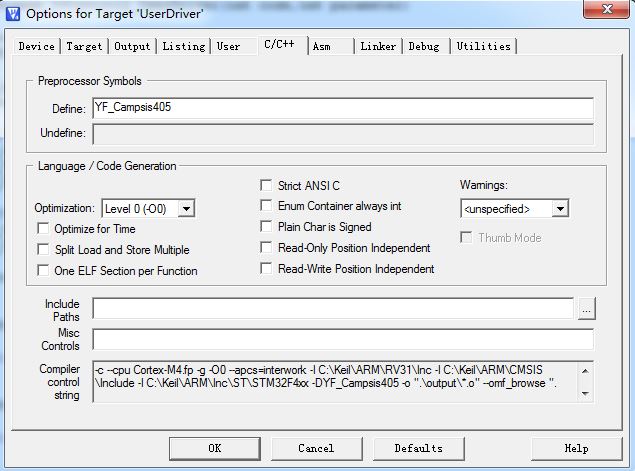
3、 输入对应的平台宏定义
4、 配置针对具体硬件所设置的离散加载配置文件
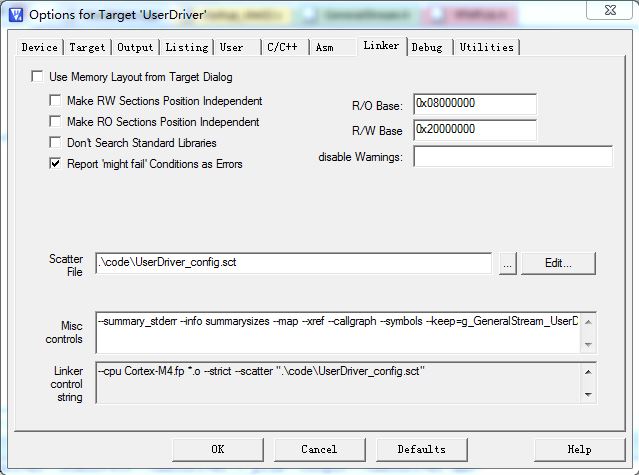
凌霄智能终端的离散加载文件的内容如下:
LR_IROM1 0x08010000 0x00010000 { ; load region size_region
ER_IROM1 0x08010000 0x00010000 { ; load address = execution address
.ANY (+RO)
}
RW_IRAM1 0x20000400 0x00002000 { ; RW data
.ANY (+RW +ZI)
}
}
表示程序加载的位置在0x08010000,大小为64K,RAM空间为0x20000400起始的8K空间。
注:用户驱动除了这部分RAM可用外,还可以直接通过接口提供的内存操作函数,分配堆上的内存。
5、 编写用户驱动(C/C++),下面是一个综合示例,用到了GPIO操作、显示操作、时钟中断操作和事件通知。
#include "GeneralStream.h"
//--//
#if defined(YF_Campsis103) || defined(YF_Campsis405)
#define COM_PORT COM1
#else
#define COM_PORT COM3
#endif volatile UINT32 Num;
void TIMER_ISR(void* param)
{
#if defined(YF_Campsis103) || defined(YF_Campsis405)
MF->CPU_GPIO_SetPinState(PC0,!MF->CPU_GPIO_GetPinState(PC0));
#else
MF->CPU_GPIO_SetPinState(PF6,!MF->CPU_GPIO_GetPinState(PF6));
#endif
MF->CPU_TIMER_SetState(TIM3,); if(Num++>)
{
Num=;
//触发事件
MF->Notice_GenerateEvent(UserDriver_Hander,);
}
} //--//
//Open1永远也不会被调用
int GeneralStream_Open1_UserDriver(LPCSTR config)
{
return ;
} int GeneralStream_Open2_UserDriver(int config)
{
//获取系统函数的指针
MF = (IGeneralStream_Function*)config; //C#下传的参数
//MF->lcd_printf("%d,%s\r\n",MF->iParam1,MF->sParam1);
MF->debug_printf("%d,%s\r\n",MF->iParam1,MF->sParam1); //初始化LED灯
#if defined(YF_Campsis103) || defined(YF_Campsis405)
MF->CPU_GPIO_EnableOutputPin(PC0,TRUE);
#else
MF->CPU_GPIO_EnableOutputPin(PF6,TRUE);
MF->CPU_GPIO_EnableOutputPin(PF7,TRUE);
MF->CPU_GPIO_EnableOutputPin(PF8,TRUE);
#endif //时钟定时
Num = ;
MF->CPU_TIMER_Initialize(TIM3,,(SYSTEM_TIM_CLOCK_HZ/-),TIMER_ISR,NULL);
MF->CPU_TIMER_Start(TIM3); //初始化串口
MF->USART_Initialize(COM_PORT,,USART_PARITY_NONE,,USART_STOP_BITS_ONE,USART_FLOW_NONE); //显示界面
MF->LCD_ClearEx(Color_Black);
MF->LCD_DrawString(,,"UserDriver Test",Color_Blue); return ;
} int GeneralStream_Close_UserDriver()
{
return ;
} int GeneralStream_IOControl1_UserDriver(int code, BYTE *inBuffer, int inCount, BYTE *outBuffer, int outCount)
{
return -;
} int GeneralStream_IOControl2_UserDriver(int code,int parameter)
{
char data[]={,,};
MF->USART_Write(COM_PORT, data, ); MF->lcd_printf("[4]%d-%d\r\n",code,parameter);
MF->debug_printf("[4]%d-%d\r\n",code,parameter); char str[];
MF->hal_snprintf(str,,"%d-%d",code,parameter);
MF->LCD_FillRectangle(,,,,Color_Black);
MF->LCD_DrawString(,,str,Color_Red); #if defined(YF_Wisteria207) || defined(YF_Wisteria407)
MF->CPU_GPIO_SetPinState(PF7,! MF->CPU_GPIO_GetPinState(PF7));
MF->CPU_GPIO_SetPinState(PF8,! MF->CPU_GPIO_GetPinState(PF8));
#endif
return code+parameter;
} int GeneralStream_Read_UserDriver(BYTE *buffer, int offset, int count)
{
return -;
} int GeneralStream_Write_UserDriver(BYTE *buffer, int offset, int count)
{
return -;
} //--//
//该函数无用,主要是为了编译成功而写
int main(void)
{
//空
} //--//
const IGeneralStream_Function *MF=NULL;
const IGeneralStream g_GeneralStream_UserDriver __attribute__ ((at(IGeneralStream_Address))) =
{
UserDriver_Flag,
&GeneralStream_Open1_UserDriver,
&GeneralStream_Open2_UserDriver,
&GeneralStream_Close_UserDriver,
&GeneralStream_IOControl1_UserDriver,
&GeneralStream_IOControl2_UserDriver,
&GeneralStream_Read_UserDriver,
&GeneralStream_Write_UserDriver,
};
6、 编译用户驱动,生成UserDriver.bin文件。
7、 采用YFAccessFlash部署UserDriver.bin文件。
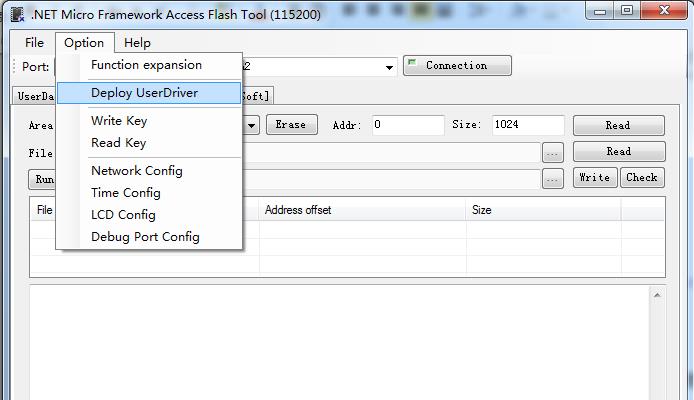
选定UserDriver.bin文件然后直接部署即可。
注:如果这不是初次部署运行用户驱动,需要先终止当前程序的执行,否则部署会出现问题(凌霄103的设备需要先部署应用,然后再部署用户驱动)。
8、 用户程序编写(C#)
public class Program
{
public static void Main()
{
Debug.Print("UserDriver Test ...");
GeneralStream gs = new GeneralStream();
if (gs.Open("UserDriver") <= 0)
{
Debug.Print("Open UserDriver failed!");
return;
}
gs.Notice += new GeneralStreamEventHandler(gs_Notice);
Debug.Print("Open UserDriver OK!");
int e = 0;
byte[] bytData= new byte[8];
while (true)
{
Debug.Print(gs.IOControl(100, e++).ToString());
gs.Read(bytData, e, 10);
System.Threading.Thread.Sleep(1000);
}
}
static void gs_Notice(uint hander, uint data, DateTime timestamp)
{
Debug.Print(hander.ToString() + " - " + data.ToString());
}
}
9、 用户程序写好后,直接在VS 2010中编译执行。
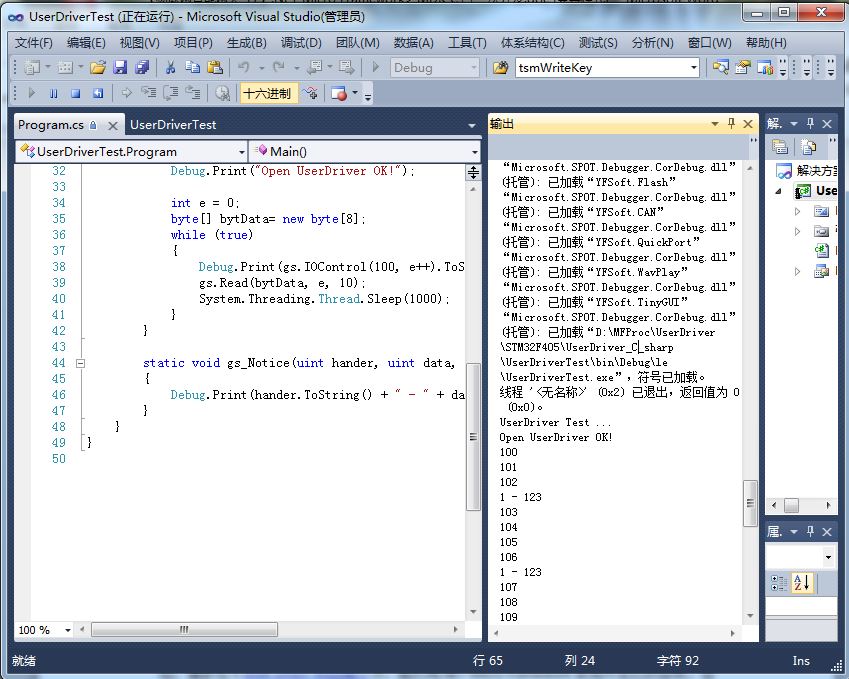
硬件运行效果图(如下):

-------------------------------------------------------
MF简介:http://blog.csdn.net/yefanqiu/article/details/5711770
MF资料:http://www.yfiot.com/DownloadList.asp?Id=2&page=1
【物联网智能网关-17】.NET Micro Framework之MDK C++二次开发的更多相关文章
- 干货分享丨玩转物联网IoTDA服务系列四-智能网关
摘要:该场景主要描述的是设备可以通过MQTT协议与物联网平台进行交互,用户可以在控制台产品详情中自定义Topic,通过应用侧接口或控制台创建数据转发规则,把设备上报的消息转发给其他华为云服务,供应用侧 ...
- 嵌入式的重要平台 .NET Micro Framework
曾经辉煌的巨人PC界渐渐走向下坡路,而智能手机圈则没完没了般地争个你死我活.随着智能手机的广泛普及,不少商家为了不坐以待毙而纷纷开始涉足与穿戴式设备--智能手表(具体参见智能手表时代还有多远). 我们 ...
- 迅为4412开发平台Zigbee模块在物联网智能家居中的应用
物联网智能家居的发展物联网随着互联网的发展,可以通过互联网实现物和物的互联,就有了物联网的概念.传统家居电器 有了物联网之后,在家居电器范围中,就是通过物联网技术将家中的各种设备连接到一起,家居中 ...
- 【.NET MF】.NET Micro Framework USB移植
1.开发环境 windows 7 32位 MDK 4.54 .Net Micro Framework Porting Kit 4.2(RTM QFE2) .Net Micro Framework ...
- 浅谈.NET Micro Framework性能优化 转自 软件中国
.NET Micro Framework的可剪裁性,高定执行,和天生对硬件高集成度都让它的前途一片光明.当然,它现在还很年轻,就发布的SDK v3.0来看,它还有很长的路要走. 废话不说,就这几个月我 ...
- 报表工具ActiveReports开发实例——物联网智能供水云平台
一.公司简介 山西汾西电子科技股份有限公司(以下简称:汾西电子)是经中国船舶重工集团批准,在原汾西重工电子科技公司基础上重组的专业从事智能电能表.水表.热量表及电动汽车充电设备研发生产的高科技公司. ...
- .NET Micro Framework 4.2 beta 源码探析
.NET Micro Framework 4.2 beta发布已经有一段时间了,一直没有腾出时间研究,昨天因为LWIP协议栈的原因(感觉上一个版本有点问题)刚 下了代码,所以抽空研究了一下. ...
- 如何重置电信悦 me 智能网关
如何重置电信悦 me 智能网关 重置电信网关密码 电信悦 me 智能网关密码忘记了怎么办? 首先,得要知道默认终端配置地址和默认终端配置密码. 可以从无线路由器背面标签得知. 如果不知道密码了,可以通 ...
- 电信悦 me 智能网关
电信悦 me 智能网关 悦 me 智能网关 Q1:什么是电信悦 me 智能网关? 悦me网关是智慧家庭的核心终端,作为"光猫+智能路由器"的集合体, 采用了全新的硬件.外观及智能操 ...
随机推荐
- [转]使用mysql profiles 来查看sql 语句执行计划
From : http://blog.csdn.net/radkitty/article/details/4632289 要使用该功能,mysql的版本必须在5.0.37版本以上.否则只能使用expl ...
- django 如何重写 HttpResponseRedirect 的响应状态码 302?
fetch无法获取302响应的header信息: 浏览器对于302状态重定向,是直接进行重定向. 且js的fetch请求无法获取(catch也好.then也罢)到302响应的header信息,自然也无 ...
- 【UOJ Round #3】
枚举/二分 C题太神窝看不懂…… 核聚变反应强度 QwQ很容易发现次小的公约数一定是gcd的一个约数,然后……我就傻逼地去每次算出a[1],a[i]的gcd,然后枚举约数……这复杂度……哦呵呵... ...
- ASP.NET MVC2之Model Binder
Model Binder在Asp.net MVC中非常简单.简单的说就是你控制器中的Action方法需要参数数据:而这些参数数据包含在HTTP请求中,包括表单上的Value和URL中的参 数等.而Mo ...
- SpringBoot整合Quartz定时任务 的简单实例 2
(1)什么是Quartz?(2)Quartz的特点:(3)Quartz专用词汇说明:(4)Quartz任务调度基本实现原理: 接下来看下具体的内容: (1)什么是Quartz? Quartz是一个完全 ...
- jquery ajax跨域
JSONP是一个非官方的协议,它允许在服务器端集成Script tags返回至客户端,通过javascript callback的形式实现跨域访问 方法一: jsonp之 getJSON js var ...
- Android -- tools
工具属性 Android 有一个专用的XML命名空间,用于使工具可以记录XML文件里的信息,并且在打包程序的进行把信息剥离到不会带来运行时期和下载大小的负面影响的程度. 这个命名空间的 URI 是 h ...
- Github用.gitignore忽略指定文件
.gitignore Github提供.gitignore这种功能,可以自己指定哪些文件可以不被管理.具体方法是在版本管理的根目录下(与.git文件夹同级)创建一个.gitignore. 应用实例 项 ...
- 使用新版SDK不想跳转微博客户端能否直接发送微博分享?
如题啊如题! 新版本中没有StatusesAPI?????
- List 多次排序
List<Patientmain> list = patientmains.OrderBy(p => p.Firstname).ThenBy(p => p.Middlename ...