算子var_threshold
算子var_threshold
名称
var_threshold — 通过局部均值和标准差分析对图像进行阈值处理。
签名
var_threshold(Image : Region : MaskWidth, MaskHeight, StdDevScale, AbsThreshold, LightDark : )
描述
使用 var_threshold 算子,可以选择输入图像 Image 中满足以下条件的像素:
具有较高的局部标准差(当
StdDevScale为正值时),或者具有较低的局部标准差(当StdDevScale为负值时)。根据
LightDark参数,在局部区域内为亮像素或暗像素。
因此,该算子能够在不均匀、有噪声或光照不均匀的背景下分割出目标区域。
输入参数提示
MaskWidth,MaskHeight:由
MaskWidth和MaskHeight定义的滤波模板大小决定了要分割对象的最大尺寸。然而,如果模板选择得过大,彼此非常接近的对象可能会被合并。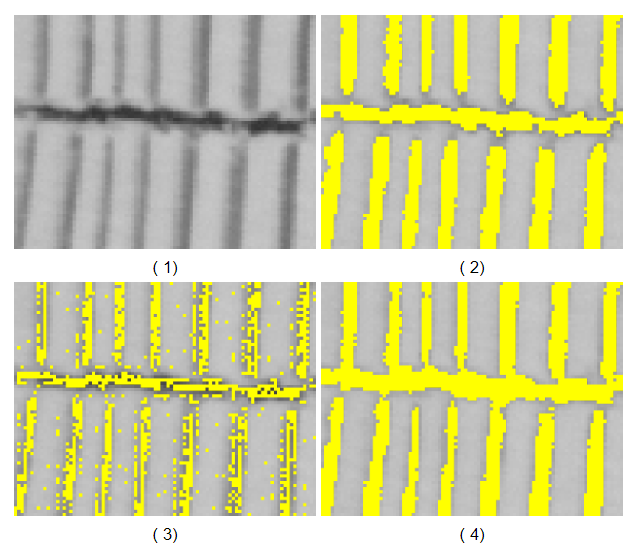
(1)原始图像;目标是对垂直线条进行计数。(2)
MaskWidth设为 12,MaskHeight设为 12,StdDevScale设为 0.1,所有垂直线条都被正确分割。(3)如果模板尺寸选择得过小(设为 3),则无法正确选择所需区域。(4)如果模板尺寸过大(设为 40),彼此非常接近的对象可能会被合并。如果
MaskWidth或MaskHeight为偶数,则会使用下一个更大的奇数。总体而言,3 可以被认为是最小的合理值。
StdDevScale:局部标准差用于衡量图像中的噪声。可以通过
StdDevScale对其进行缩放,以反映所需的灵敏度。值越高,意味着只选择与周围像素差异非常大的像素。对于参数
StdDevScale,取值在 -1.0 到 1.0 之间是比较合理的选择,建议值为 0.2。如果该参数设置得过高或过低,可能会返回空区域或全区域。
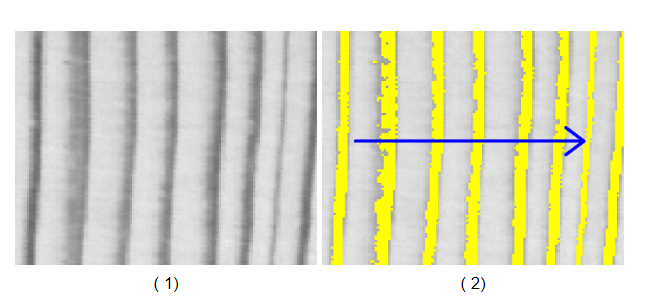
(1)如果
StdDevScale设置得过高(设为 1.3),算子会变得“挑剔”,只选择与周围像素非常相似的像素。(2)如果StdDevScale设置得过低(设为 -0.3),会错误地选择过多与周围像素有些相似的像素。
AbsThreshold:在图像的均匀区域中,标准差较低,因此单个灰度值的影响较大。为了降低算子在均匀区域的灵敏度,可以调整
AbsThreshold参数。这样,就可以忽略均匀背景中较小的灰度值变化。需要注意的是,当StdDevScale为负值时,AbsThreshold也应选择负值。
LightDark:'light'或'dark'分别返回比其周围像素更亮或更暗的所有像素。'equal'返回未被上述两种选项选中的所有像素,即与周围像素相对相等的像素。'not_equal'返回'light'和'dark'的组合结果,即所有与周围像素不同的像素。
计算过程
(1)初始图像。(2)经过阈值处理后的图像(
StdDevScale设为 0.6,MaskWidth设为 15,MaskHeight设为 15,AbsThreshold设为 10)。以下图像以示例方式展示了沿蓝色箭头方向的结果是如何得到的。var_threshold算子从输入图像Image中选择满足阈值条件的区域Region。阈值是根据每个像素 (x, y) 周围大小为MaskWidthxMaskHeight的局部模板内的平均灰度值和标准差计算得出的。
设:
g(x,y)为输入图像Image中位置 (x, y) 处的灰度值。m(x,y)为相应的平均灰度值。d(x,y)为该像素周围模板内的相应标准差。

即这些像素周围模板内的原始灰度值、相应的平均灰度值和相应的标准差。
那么,可变阈值 v(x,y) 定义如下
v(x,y) = max(StdDevScale * d(x,y), AbsThreshold) \;\ for \;\ StdDevScale \geqslant 0
$$
or
v(x,y) = min( StdDevScale * d(x,y), AbsThreshold) \;\; for \;\; StdDevScale \leqslant 0
$$
解释:当
StdDevScale为正值时,会分析每个像素。确定用户定义的AbsThreshold和缩放后的标准差哪个更大,选择较大的值作为可变阈值v(x,y)。当StdDevScale为负值时,则选择相应的较小值。
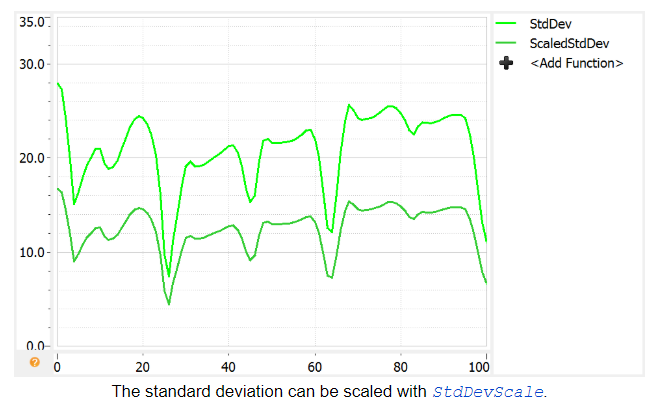
可以使用 StdDevScale 对标准差进行缩放。
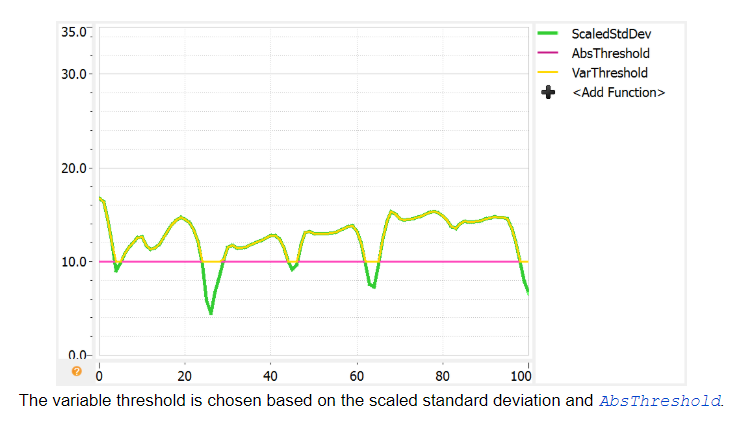
可变阈值是根据缩放后的标准差和 AbsThreshold 来选择的。
根据可变阈值选择哪些像素由参数 LightDark 决定:
'light':$$
g(x,y) \ge m(x,y)+v(x,y)
$$解释:如果某个像素比其周围像素亮
v(x,y)个灰度值,则该像素被选中。
'dark':$$
g(x,y) \le m(x,y)-v(x,y)
$$解释:如果某个像素比其周围像素暗
v(x,y)个灰度值,则该像素被选中。
LightDark = 'equal':$$
m(x,y)-v(x,y)\le g(x,y)\le m(x,y)+v(x,y)
$$解释:精确选择那些未被
'light'和'dark'选中的像素,即与周围像素相对相等的像素。
'not_equal':$$
m(x,y)-v(x,y)\ge g(x,y) \; \or \: g(x,y) \ge m(x,y)+v(x,y)
$$解释:选择
'light'和'dark'两种情况下的所有像素,即所有与周围像素相差v(x,y)个灰度值的像素。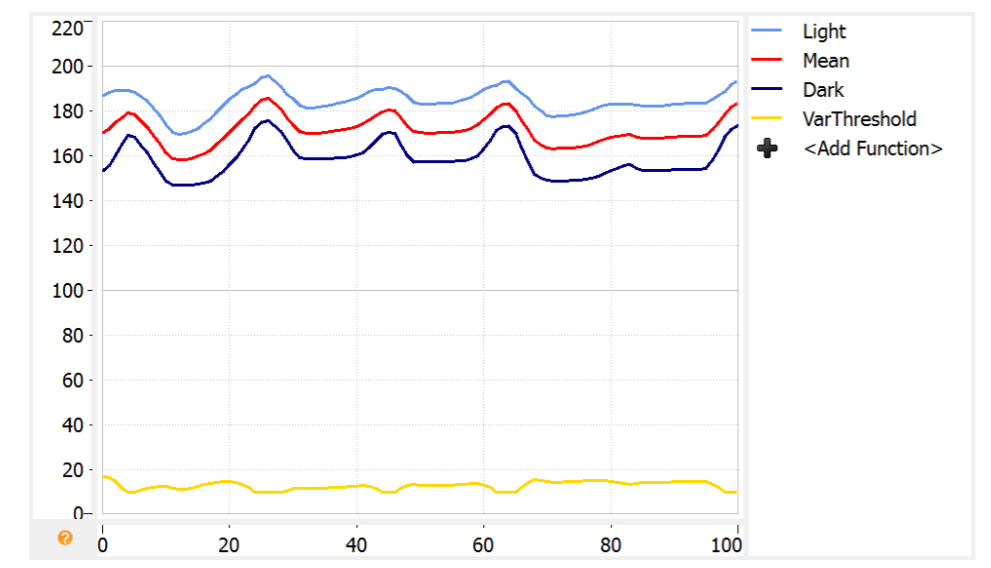
'light' 和 'dark' 是根据相应的平均灰度值和可变阈值计算得出的。
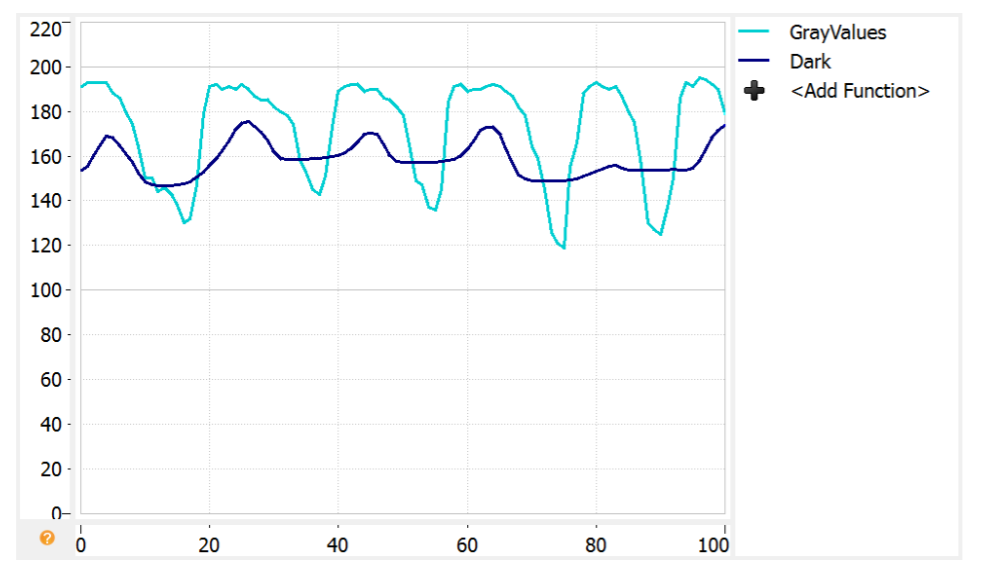
例如,如果选择了 “暗(dark)” 选项,那么所有 “暗曲线” 高于 “灰度值曲线” 的像素都会被选中
注意事项
请注意,如果使用具有缩小定义域的图像作为输入,滤波算子可能会返回意外结果。请参考“滤波器”章节。
参数
Image(输入对象) 单通道图像(数组) → 对象(byte/int2/int4/uint2/real)输入图像。
Region(输出对象) 区域(数组) → 对象分割后的区域。
MaskWidth(输入控制) 范围.x → (整数)用于计算均值和标准差的模板宽度。
默认值:15
建议值:9, 11, 13, 15
限制条件:
MaskWidth >= 1
MaskHeight(输入控制) 范围.y → (整数)用于计算均值和标准差的模板高度。
默认值:15
建议值:9, 11, 13, 15
限制条件:
MaskHeight >= 1
StdDevScale(输入控制) 数值 → (实数 / 整数)灰度值标准差的缩放因子。
默认值:0.2
建议值:-0.2, -0.1, 0.1, 0.2
AbsThreshold(输入控制) 数值 → (实数 / 整数)与均值的最小灰度值差异。
默认值:2
建议值:-2, -1, 0, 1, 2
LightDark(输入控制) 字符串 → (字符串)阈值类型。
默认值:
'dark'取值列表:
'dark','equal','light','not_equal'
复杂度
设 A 为输入区域的面积,则运行时间为 O(A)。
结果
如果所有参数正确,var_threshold 算子返回 2 (H_MSG_TRUE)。可以通过 set_system 函数设置标志 'no_object_result'、'empty_region_result' 和 'store_empty_region' 的值来确定对输入图像和输出区域的处理方式。必要时会抛出异常。
替代算子
dyn_threshold,threshold
参考文献
W.Niblack,《数字图像处理导论》,第 115 - 116 页,新泽西州恩格尔伍德克利夫斯,普伦蒂斯·霍尔出版社,1986 年
模块
基础模块
HDevelop 例程
var_threshold.hdev:使用根据局部均值和标准差计算得到的局部阈值对图像进行分割。label_word_process_mlp.hdev:使用基于多层感知器(MLP)的 OCR 分类器和词典读取保质期标签,以提高识别结果。check_smd_tilt.hdev:检查表面贴装器件(SMD)是否倾斜。check_blister.hdev:检查自动填充的泡罩包装的内容物。
算子var_threshold的更多相关文章
- Halcon阈值化算子dual_threshold和var_threshold的理解
Halcon中阈值二值化的算子众多,通常用得最多的有threshold.binary_threshold.dyn_threshold等. threshold是最简单的阈值分割算子,理解最为简单:bin ...
- HALCON中的算子大全(中英对照)
HALCON中的算子大全(中英对照) Chapter 1 :Classification1.1 Gaussian-Mixture-Models1.add_sample_class_gmm功能:把一个训 ...
- HALCON学习之算子大全
1.1 Gaussian-Mixture-Models 1.add_sample_class_gmm 功能:把一个训练样本添加到一个高斯混合模型的训练数据上. 2.classify_class_gmm ...
- halcon 算子功能查找大全中文版(可直接下载)
原文作者:aircraft 原文链接:https://www.cnblogs.com/DOMLX/p/11543364.html haicon算子中文查找大全百度云链接 链接:https://pan. ...
- Halcon斑点分析涉及算子及其高阶运用
涉及算子 获取图像 使用ROI 对齐ROI或图像 校正图像 基础内容这里不再重述 预处理图像(过滤) 基础: mean_image(平均平滑过滤),gauss_filter(高斯滤波),binomia ...
- (八)map,filter,flatMap算子-Java&Python版Spark
map,filter,flatMap算子 视频教程: 1.优酷 2.YouTube 1.map map是将源JavaRDD的一个一个元素的传入call方法,并经过算法后一个一个的返回从而生成一个新的J ...
- opencv中的SIFT,SURF,ORB,FAST 特征描叙算子比较
opencv中的SIFT,SURF,ORB,FAST 特征描叙算子比较 参考: http://wenku.baidu.com/link?url=1aDYAJBCrrK-uk2w3sSNai7h52x_ ...
- 特征描述算子-sift
特征描述算子-sift http://boche.github.io/download/sift/Introduction%20to%20SIFT.pdf
- EasyPR--开发详解(3)高斯模糊、灰度化和Sobel算子
在上篇文章中我们了解了PlateLocate的过程中的所有步骤.在本篇文章中我们对前3个步骤,分别是高斯模糊.灰度化和Sobel算子进行分析. 一.高斯模糊 1.目标 对图像去噪,为边缘检测算法做准备 ...
- Spark算子选择策略
摘要 1.使用reduceByKey/aggregateByKey替代groupByKey 2.使用mapPartitions替代普通map 3.使用foreachPartitions替代forea ...
随机推荐
- 【信号与系统】求使系统稳定的常数K的范围
- 搭建SpringBoot中验证数据机制问题 Add a provider like Hibernate Validator (RI) to your classpath
搭建SpringBoot中的验证数据机制时出现的错误 报错代码 java.lang.IllegalStateException: Failed to load ApplicationContext a ...
- python量化指标计算talib函数功能一览表
安装talib库:pip install talib 1 # 取个数据验证一下 2 set_token('') 3 data = history(symbol = 'SHSE.600519',freq ...
- Qt编写地图综合应用27-点聚合
一.前言 在地图上查询结果通常以标记点的形式展现,但是如果标记点较多,不仅会大大增加客户端的渲染时间,让客户端变得很卡,而且会让人产生密集恐惧症.为了解决这一问题,我们需要一种手段能在用户有限的可视区 ...
- 什么是 单点登录SSO?SSO工作原理
记住多个用户名和密码来访问不同网站和应用程序很麻烦.单点登录 (SSO) 允许用户使用一组凭证访问多个资源,从而消除了对多个用户 ID 和密码的需求. 没有 SSO 的世界 在没有 SSO 的情况下, ...
- C# SynchronizationContext线程上下文简单说明
SynchronizationContext线程上下文说明SynchronizationContext在通讯中充当传输者的角色,实现功能就是一个线程和另外一个线程的通讯 那么Synchronizati ...
- 使用Matlab进行图像分类
Classify images Instructions are in the task pane to the left. Complete and submit each task one at ...
- 今天记录一下小程序使用微信客服api,而不是小程序客服
小程序客服缺少很多东西,并且只能使用button的开放能力,所以尝试使用一下微信客服,自己开发客服又比较麻烦,秉着能免费绝不花钱的想法,接下来就直接写代码,也就是api,记录下来方便使用 wx.ope ...
- 【问题解决记录】vue解决低版本安卓与ios10以下系统兼容性问题
问题描述: 项目中的企业微信内部应用,使用Vue-cli搭建的H5页面web,在低版本的安卓手机或ios8.0.9.0中出现接口数据访问失败,HTTP状态码返回0的问题,无法正常使用系统.安卓手机主要 ...
- biancheng-Django(python)
http://c.biancheng.net/django/ Django MTV和MVC的区别 1. MVC设计模式 我们先对 MVC 设计模式进行介绍,它是 Web 设计模式的经典之作,MTV 模 ...