三维计算机视觉 — 中层次视觉 — Point Pair Feature
机器人视觉中有一项重要人物就是从场景中提取物体的位置,姿态。图像处理算法借助Deep Learning 的东风已经在图像的物体标记领域耍的飞起了。而从三维场景中提取物体还有待研究。目前已有的思路是先提取关键点,再使用各种局部特征描述子对关键点进行描述,最后与待检测物体进行比对,得到点-点的匹配。个别文章在之后还采取了ICP对匹配结果进行优化。
对于缺乏表面纹理信息,或局部曲率变化很小,或点云本身就非常稀疏的物体,采用局部特征描述子很难有效的提取到匹配对。所以就有了所谓基于Point Pair 的特征,该特征使用了一些全局的信息来进行匹配,更神奇的是,最终的位姿估计结果并不会陷入局部最小值。详细可参见论文:Model globally, match locally: Efficient and robust 3D object recognition. 与 Going further with point pair features。SLAM的重要研究方向object based Slam 也声称使用了Point Pair Feature进行匹配。
为了更好的理解这种方法,而在pcl中也没有找到现成的算法,所以我自己用matlab实现了一遍。
算法的思想很简单:
0、ppf 特征为[d,<d,n1>,<d,n2>,<n1,n2>].
1、针对目标模型,在两两点之间构造点对特征F,如果有N个点,那么就有N*N个特征(说明此算法是O(N2)的),N*N个特征形成特征集F_Set
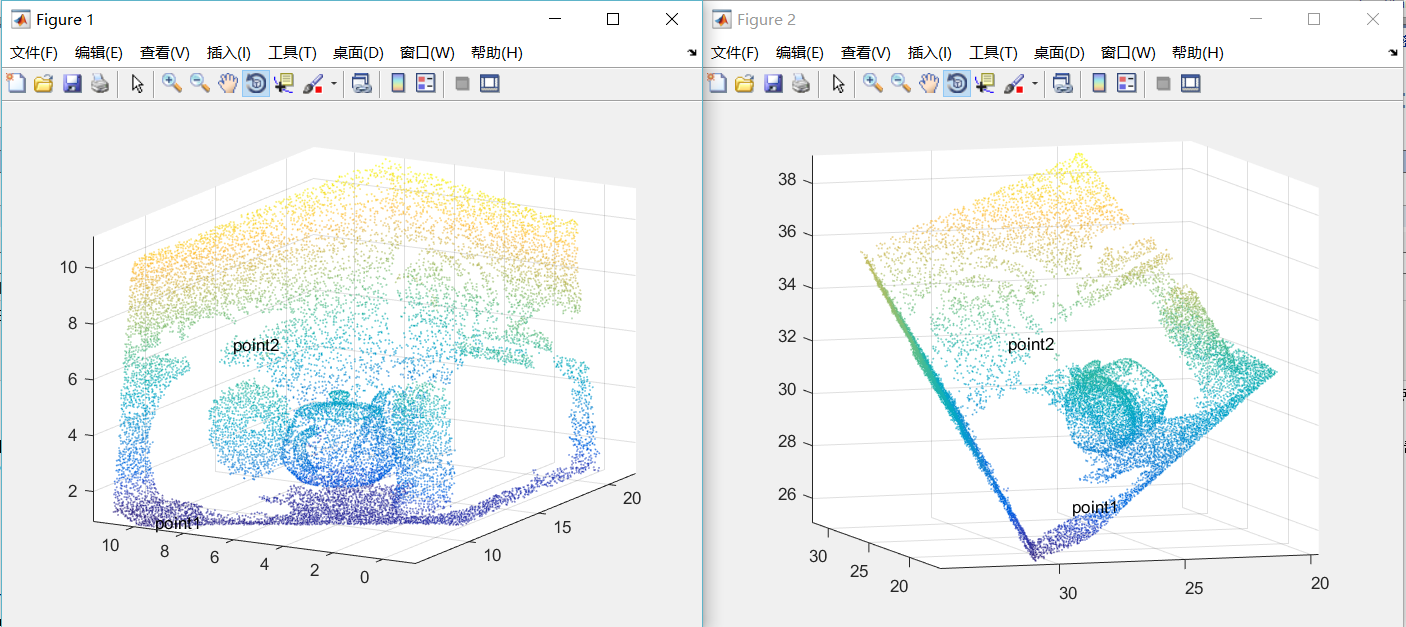
2、在场景中任意取1定点a,再任意取1动点b,构造ppf特征,并从F_set中寻找对应的,那么理想情况下,如果找到了完全匹配的特征,则可获得点云匹配的结果。
3、此算法是一种投票算法,每次匹配都能得到一个旋转角度,如果m个b都投票给了某一旋转角度则可认为匹配成功
这个算法最大的问题就是不停的采样会导致极大的计算量。不过算法本身确实可以匹配物体和场景。
ppf 特征的构建
function obj = ppf(point1,point2)
d = point1.Location - point2.Location;
d_unit = d/norm(d);
apha1 = acos(point1.Normal*d_unit');
apha2 = acos(point2.Normal*d_unit');
apha3 = acos(point1.Normal*point2.Normal');
obj = [norm(d),apha1,apha2,apha3];
end
ppf 特征集的构建
classdef modelFeatureSet < handle
%MODELFEATURESET 此处显示有关此类的摘要
% 此处显示详细说明 properties
FeatureTree
ModelPointCloud
Pairs
end methods
function obj = modelFeatureSet(pt)
obj.ModelPointCloud = copy(pt.removeInvalidPoints());
end
function growTree(self)
self.ModelPointCloud = pcdownsample(self.ModelPointCloud,'GridAverage',.);
pt_size = self.ModelPointCloud.Count;
idx = repmat(:pt_size,pt_size,);
tmp1 = reshape(idx,pt_size*pt_size,);
tmp2 = reshape(idx',pt_size*pt_size,1);
pairs = [tmp1,tmp2];
rnd = randseed(,,,,pt_size*pt_size);
pairs = pairs(rnd,:);
Features = zeros(size(pairs,),);
for i = :size(pairs,)
Features(i,:) = ppf(self.ModelPointCloud.select(pairs(i,)),...
self.ModelPointCloud.select(pairs(i,)));
end
self.FeatureTree = createns(Features);
self.Pairs = pairs;
end
end
end
三维计算机视觉 — 中层次视觉 — Point Pair Feature的更多相关文章
- 三维计算机视觉 —— 中层次视觉 —— RCNN Family
RCNN是从图像中检测物体位置的方法,严格来讲不属于三维计算机视觉.但是这种方法却又非常非常重要,对三维物体的检测非常有启发,所以在这里做个总结. 1.RCNN - the original idea ...
- point pair feature在2D图像匹配中的应用
point pair feature在2D图像匹配中的应用 point pair feature(ppf) @article{BertramDrost2010ModelGM, title={Model ...
- PCL — Point Pair Feature 中层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5971976.html 机器人视觉中有一项重要人物就是从场景中提取物体的位置,姿态.图像处理算法借助Deep Lea ...
- PCL—低层次视觉—关键点检测(NARF)
关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别.寻物联系在一起.关键点检测可以说是通往高层次视觉的重要基础.但本章节仅在低层次视觉上讨论点云处理问题,故所有 ...
- PCL —— RCNN Family 中层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/6046411.html RCNN是从图像中检测物体位置的方法,严格来讲不属于三维计算机视觉.但是这种方法却又非常非常 ...
- PCL—低层次视觉—关键点检测(rangeImage)
关键点又称为感兴趣的点,是低层次视觉通往高层次视觉的捷径,抑或是高层次感知对低层次处理手段的妥协. ——三维视觉关键点检测 1.关键点,线,面 关键点=特征点: 关键线=边缘: 关键面=foregro ...
- PCL—低层次视觉—点云分割(邻近信息)
分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最简单的分割方式就是在边界上找些居民问:"小伙子,你到底能不能上油管啊?”.然后把能上油管的居民坐标 ...
- [Deep-Learning-with-Python]计算机视觉中的深度学习
包括: 理解卷积神经网络 使用数据增强缓解过拟合 使用预训练卷积网络做特征提取 微调预训练网络模型 可视化卷积网络学习结果以及分类决策过程 介绍卷积神经网络,convnets,深度学习在计算机视觉方面 ...
- 计算机视觉中的词袋模型(Bow,Bag-of-words)
计算机视觉中的词袋模型(Bow,Bag-of-words) Bag-of-words 读 'xw20084898的专栏'的blogBag-of-words model in computer visi ...
随机推荐
- Kafka监控框架介绍
前段时间在想Kafka怎么监控.怎么知道生产的消息或消费的消费是否有丢失,目前有几个开源的Kafka监控框架这里整理了下,不过这几个框架都有各自的问题侧重点不一样: 1.Kafka Monitor 2 ...
- JS_高程7.函数表达式(1)
定义函数的两种常见的方法: 1 . 函数声明 2. 函数表达式 # 差异 (1)函数声明 ,具有函数声明提升的特征. (2)函数声明的函数的name属性为函数的名称:使用函数表达式定义的函数在ES5中 ...
- 常见的git清单
我们每天使用 Git ,但是很多命令记不住. 一般来说,日常使用只要记住下图6个命令,就可以了.但是熟练使用,恐怕要记住60-100个命令. 这篇文章是从别人博客上copy重新整理出来的,作为笔记用, ...
- Asp.Net Core 404处理
在使用Asp.Net Core Mvc时 404处理整理如下 一.自带404状态处理 1.控制器视图子弹404视图 NotFoundResult,NotFoundObjectResult // // ...
- Spring Boot + Mybatis 实现动态数据源
动态数据源 在很多具体应用场景的时候,我们需要用到动态数据源的情况,比如多租户的场景,系统登录时需要根据用户信息切换到用户对应的数据库.又比如业务A要访问A数据库,业务B要访问B数据库等,都可以使用动 ...
- ArcGIS鼠标滚轮方向之代码篇
Desktop10.X有多个版本,不同版本的注册表路径不一致,注册表中可能残留多个版本的注册信息:也可能没有Desktop,而是Engine.其实可以通过RuntimeManager.ActiveRu ...
- Lombok 使用攻略
1. Lombok 简介 Lombok 可以通过简单的注解来帮助我们简化消除一些必须有但显得很臃肿的Java代码,通过使用对应的注解,可以在编译源码的时候生成对应的方法. Lombok 既是一个 ID ...
- 每天一个linux命令:chmod
1.命令简介 chmod(Change mode) 用来将每个文件的模式更改为指定值.Linux/Unix 的档案调用权限分为三级 : 档案拥有者.群组.其他. u :目录或者文件的当前的用户 g : ...
- assert BOOST_ASSERT的坑
下面这行代码 BOOST_ASSERT(SUCCEEDED(m_pd3dDevice->CreateBuffer(&frame_ptr->m_const_buffers[i].m_ ...
- 用反向代理nginx proxy_pass配置解决ie8 ajax请求被拦截问题 ie8用nginx代理实现跨域请求访问 nginx405正向代理request_uri
最近调PC版网站ie8的兼容性,发现所有ajax请求还没到后端服务器就直接ajax error了 ie8发不出ajax请求,断点调试发现ajax全进入了error,提示“No transport” 我 ...