PCL — Point Pair Feature 中层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5971976.html
机器人视觉中有一项重要人物就是从场景中提取物体的位置,姿态。图像处理算法借助Deep Learning 的东风已经在图像的物体标记领域耍的飞起了。而从三维场景中提取物体还有待研究。目前已有的思路是先提取关键点,再使用各种局部特征描述子对关键点进行描述,最后与待检测物体进行比对,得到点-点的匹配。个别文章在之后还采取了ICP对匹配结果进行优化。
对于缺乏表面纹理信息,或局部曲率变化很小,或点云本身就非常稀疏的物体,采用局部特征描述子很难有效的提取到匹配对。所以就有了所谓基于Point Pair 的特征,该特征使用了一些全局的信息来进行匹配,更神奇的是,最终的位姿估计结果并不会陷入局部最小值。详细可参见论文:Model globally, match locally: Efficient and robust 3D object recognition. 与 Going further with point pair features。SLAM的重要研究方向object based Slam 也声称使用了Point Pair Feature进行匹配。
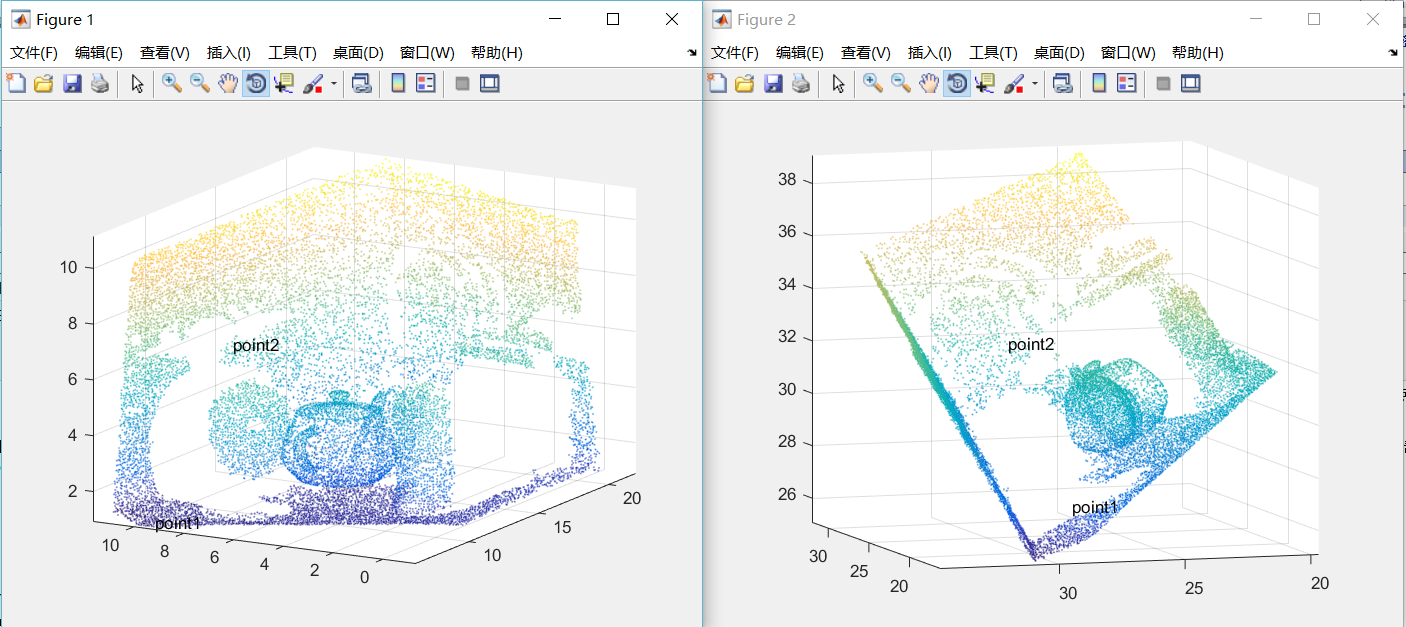
为了更好的理解这种方法,而在pcl中也没有找到现成的算法,所以我自己用matlab实现了一遍
算法的思想很简单:
0、ppf 特征为[d,<d,n1>,<d,n2>,<n1,n2>].
1、针对目标模型,在两两点之间构造点对特征F,如果有N个点,那么就有N*N个特征(说明此算法是O(N2)的),N*N个特征形成特征集F_Set
2、在场景中任意取1定点a,再任意取1动点b,构造ppf特征,并从F_set中寻找对应的,那么理想情况下,如果找到了完全匹配的特征,则可获得点云匹配的结果。
3、此算法是一种投票算法,每次匹配都能得到一个旋转角度,如果m个b都投票给了某一旋转角度则可认为匹配成功
这个算法最大的问题就是不停的采样会导致极大的计算量。不过算法本身确实可以匹配物体和场景。
//ppf 特征的构建function obj = ppf(point1,point2)
d = point1.Location - point2.Location;
d_unit = d/norm(d);
apha1 = acos(point1.Normal*d_unit');
apha2 = acos(point2.Normal*d_unit');
apha3 = acos(point1.Normal*point2.Normal');
obj = [norm(d),apha1,apha2,apha3];
end
ppf 特征集的构建
classdef modelFeatureSet < handle
%MODELFEATURESET 此处显示有关此类的摘要
% 此处显示详细说明
properties
FeatureTree
ModelPointCloud
Pairs
end
methods
function obj = modelFeatureSet(pt)
obj.ModelPointCloud = copy(pt.removeInvalidPoints());
end
function growTree(self)
self.ModelPointCloud = pcdownsample(self.ModelPointCloud,);
pt_size = self.ModelPointCloud.Count;
idx = repmat(:pt_size,pt_size,);
tmp1 = reshape(idx,pt_size*pt_size,);
tmp2 = reshape(idx',pt_size*pt_size,1);
pairs = [tmp1,tmp2];
rnd = randseed(,,,,pt_size*pt_size);
pairs = pairs(rnd,:);
Features = zeros(size(pairs,),);
:size(pairs,)
Features(i,:) = ppf(self.ModelPointCloud.)),...
self.ModelPointCloud.)));
end
self.FeatureTree = createns(Features);
self.Pairs = pairs;
end
end
end
PCL — Point Pair Feature 中层次点云处理的更多相关文章
- PCL —— RCNN Family 中层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/6046411.html RCNN是从图像中检测物体位置的方法,严格来讲不属于三维计算机视觉.但是这种方法却又非常非常 ...
- 三维计算机视觉 — 中层次视觉 — Point Pair Feature
机器人视觉中有一项重要人物就是从场景中提取物体的位置,姿态.图像处理算法借助Deep Learning 的东风已经在图像的物体标记领域耍的飞起了.而从三维场景中提取物体还有待研究.目前已有的思路是先提 ...
- PCL—点云分割(邻近信息) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5000147.html 分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最 ...
- point pair feature在2D图像匹配中的应用
point pair feature在2D图像匹配中的应用 point pair feature(ppf) @article{BertramDrost2010ModelGM, title={Model ...
- 从PCD文件中读取点云数据
博客转载自:http://www.pclcn.org/study/shownews.php?lang=cn&id=84 在本小节我们学习如何从PCD文件中读取点云数据. 代码 章例1文件夹中, ...
- MeshLab中进行点云配准
MeshLab是一个开源.可移植和可扩展的三维几何处理系统,主要用于交互处理和非结构化编辑三维三角形网格.它支持多种文件格式: import:PLY, STL, OFF, OBJ, 3DS, COLL ...
- 在OneThink(ThinkPHP3.2.3)中整合阿里云OSS的PHP-SDK2.0.4,实现Web端直传,服务端签名直传并设置上传回调的实现流程
在OneThink(ThinkPHP3.2.3)中整合阿里云OSS的PHP-SDK2.0.4,实现本地文件上传流程 by shuijingwan · 2016/01/13 1.SDK安装 github ...
- 【阿里云产品公测】在Laravel4框架中使用阿里云ACE的缓存服务
作者:阿里云用户dvbhack 受论坛排版和格式限制,这篇帖子的格式不是很利于阅读,如果你看帖子觉得不那么舒服,可以看我发表在自己博客上的原文:http://www.ofcss.com/2014/04 ...
- Ubuntu系统中登陆阿里云服务器的方法
如果您购买了阿里云服务器,恰巧又在使用Ubuntu操作系统,那么恭喜你来对地方了,今天给大家分享一下如何在Ubuntu中登陆阿里云服务器: 主要使用两款软件:1.SecureCRT:2.SecureF ...
随机推荐
- nginx安装目录
1.rpm -ql nginx看看通过yum安装到哪里了 2./etc/logrotate.d/nginx 配置 nginx日志轮转 用于logrotate服务的日志切割 3./etc/ngin ...
- 【.Net】调用Web API的几种方式
引言 记录一下调用Web API的几种方式,以调用百度API为例. HttpWebRequest HttpWebRequest位于System.Net命名空间,是常用的调用Web API类库. str ...
- 教你们在cmd里运行打开游戏,效率很快的。喜欢吧?
第一步安装好的游戏 环境变量 变量值:把刚才复制好粘贴在里面,前面不用删除. 喜欢吧?这招非常好用.
- (转)Java发送http请求(get 与post方法请求)
本文转载于:http://bijian1013.iteye.com/blog/2166855 package com.bijian.study; import java.io.BufferedRead ...
- Python with 结构
一段基本的 with 表达式,其结构是这样的: with EXPR as VAR: BLOCK EXPR 可以是任意表达式: as VAR 是可选的.其一般的执行过程是这样的: 计算 EXPR ,并获 ...
- BZOJ5118:Fib数列2(O1快速模)
题意:输入N,输出fib(2^N)%1125899839733759.(P=1125899839733759是素数) 思路:欧拉降幂,因为可以表示为矩阵乘法,2^N在幂的位置,矩阵乘法也可以降幂,所以 ...
- CodeForces - 682E: Alyona and Triangles(旋转卡壳求最大三角形)
You are given n points with integer coordinates on the plane. Points are given in a way such that th ...
- MySQL_截止昨日南京市所有在职业务员业绩排名-20170116
#计算南京销售员总业绩排名 数据结果已打乱处理 #职工信息表包含在职和离职两种状态 因此不能以这表当做主表 不然离职人的数据也会出现 以毛利表为主表 销售员限制在昨天在职的销售范围内 且和后面left ...
- 关于打包后提示无法连接到mongodb的情况
昨天晚上要和前端联调. 打完jar包后发现无法连接到测试环境的数据库. 就很尴尬,最后发现问题在于mongodb的URI写错了: 正确的URI格式:mongodb://url:port/dbName ...
- Zabbix通过SNMPv2监控DELL服务器的硬件信息
(一)zabbix监控DELL服务器 (1)简述:监控DELL服务器硬件一般有两种途径:1.操作系统上安装OMSA,编写脚本调用omreport命令进行监控(需要在操作系统上安装比较麻烦):2.使用i ...