OpenCv:边缘处理&Canny边缘检测
卷积边缘:
一、在进行卷积的时候,对于原图像(1,1)的位置,左、上方没有足够的像素做卷积。
二、通常,在卷积之前,在原图增加边缘像素,比如(3*3的,增加一个像素)
三、增加像素值得处理方法,通常有:
(一)BORDER_DEFAULT。默认
(二)BORDER_CONSTANT。使用固定的值。
(三)BORDER_REPLICATE。使用已知边缘的像素值。
(四)BORDER_WRAP。用另一边的像素值来补偿填充。
四、API
copyMakeBorder(
Mat src,
Mat dst,
int top,//边缘宽度,一般上下左右都一样
int bottom,
int left,
int right,
int borderType,//类型
Scalar value //颜色限制
)
五、例子
原图
BORDER_DEFAULT
BORDER_REPLICATE
BORDER_WRAP
Canny边缘检测
一、算法介绍
(一)高斯模糊——GaussianBlur。就是对图像进行降噪。
(二)灰度转换——cvtColor。
(三)计算梯度——Sobel/Scharr。得到 |X| + |Y|。
(四)非最大信号抑制。由于Sobel后,边沿非常强(粗),甚至起“皱褶”。因此要处理。
(五)高低阈值输出二值图像。
二、详细介绍
(一)梯度。Sobel

Gx:将kernel内,水平方向的所有变化量,全部集中在【锚点】处,而且【锚点】同行,还*2,突出其权重。
G如果大于某个阈值,那么此位置就可能是边缘了。
G通常用G = |Gx| +|Gy|
(二)非最大信号抑制。
1、梯度方向。在哪个方向变化最大。
θ在0~180度之间
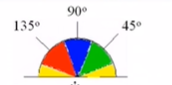
2、抑制。
(1)找到θ
(2)比如θ=90度,找到90±45度的像素(左上、右上)
(3)如果像素值,大于左上、右上,那么保留。否则舍弃。
(三)高低阈值输出二值图像。
1、定义2个阈值:高值T1、低值T2。
2、大于T1,保留;小于T2,丢弃。
3、从高于T1的像素开始寻找,大于T2且相互链接的,都保留。
4、推荐T1:T2 = 3:1,或者2:1。
三、API介绍
Canny(
Mat src, //8-bit(位)的灰度图
Mat dst,
double T2, //低阈值,此值越高,得到的边缘越少,最终只留最强的边缘
double T1, //高阈值,通常为255
int aptertureSize,//Soble算子的Size,通常3*3的,所以这里填3
bool L2gradient //true表示是L2来归一化,否则用L1归一化,一般为false
) //L2gradient ,使用L2,则用G = sqrt(gx*gx + gy* gy)来求梯度,否则用
//G = |gx| + |gy|来近似
四、例子
Mat gaussianBlur, gray, canny;
cvtColor(src, gray, COLOR_BGR2GRAY);
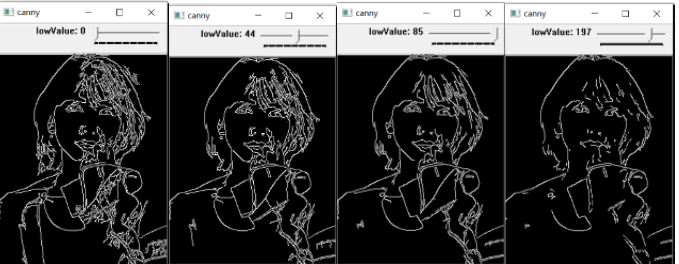
Canny(gray, canny, 85, 255, 3);
imshow("canny", canny);
随着低阈值的变化,而变化
OpenCv:边缘处理&Canny边缘检测的更多相关文章
- openCV实例:Canny边缘检测
http://blog.sina.com.cn/s/blog_737adf530100z0jk.html 在第一次使用openCV程序成功对图像进行打开后,现在开始试验第二个例程试验:Canny边缘检 ...
- opencv——自适应阈值Canny边缘检测
前言 Canny边缘检测速度很快,OpenCV中经常会用到Canny边缘检测,以前的Demo中使用Canny边缘检测都是自己手动修改高低阈值参数,最近正好要研究点小东西时,就想能不能做个自适应的阈值, ...
- OpenCV: Canny边缘检测算法原理及其VC实现详解(转载)
原文地址:http://blog.csdn.net/likezhaobin/article/details/6892176 原文地址:http://blog.csdn.net/likezhaobin/ ...
- [转载+原创]Emgu CV on C# (六) —— Emgu CV on Canny边缘检测
Canny边缘检测也是一种边缘检测方法,本文介绍了Canny边缘检测的函数及其使用方法,并利用emgucv方法将轮廓检测解算的结果与原文进行比较. 图像的边缘检测的原理是检测出图像中所有灰度值变化较大 ...
- Canny边缘检测算法原理及其VC实现详解(二)
转自:http://blog.csdn.net/likezhaobin/article/details/6892629 3. Canny算法的实现流程 由于本文主要目的在于学习和实现算法,而对于图像 ...
- openc —— Canny 边缘检测
边缘检测的一般步骤 [第一步]滤波 边缘检测的算法主要是基于图像强度的一阶和二阶导数,但导数通常对噪声很敏感,因此必须采用滤波器来改善与噪声有关的边缘检测器的性能.常见的滤波方法主要有高斯滤波,即采用 ...
- 机器学习进阶-边缘检测-Canny边缘检测 1.cv2.Canny(进行Canny边缘检测)
1. cv2.Canny(src, thresh1, thresh2) 进行canny边缘检测 参数说明: src表示输入的图片, thresh1表示最小阈值,thresh2表示最大阈值,用于进一步删 ...
- OpenCV图像Canny边缘检测
Canny边缘检测 图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘函数原型: void cvCanny( ...
- openCV(四)---Canny边缘检测
图像的边缘检测的原理是检测出图像中所有灰度值变化较大的点,而且这些点连接起来就构成了若干线条,这些线条就可以称为图像的边缘. 直接上代码,函数简介都在代码注释中 //canny边缘检测 -(void) ...
- 基于opencv下对视频的灰度变换,高斯滤波,canny边缘检测处理,同窗体显示并保存
如题:使用opencv打开摄像头或视频文件,实时显示原始视频,将视频每一帧依次做灰度转换.高斯滤波.canny边缘检测处理(原始视频和这3个中间步骤处理结果分别在一个窗口显示),最后将边缘检测结果保存 ...
随机推荐
- 关于Intent Uri页面跳转
android browser支持支持Intent Scheme URL语法的可以在wrap页面加载或点击时,通过特定的intent uri链接可以打开对应app页面,例如 <a href=&q ...
- VUE环境运行搭建
第一步:下载安装node.js 1.下载node.js,vue的运行是要依赖于node的npm的管理工具来实现,所以第一步我们需要安装 Node.js,访问官网 https://nodejs.org/ ...
- java学习日记20230228-数据类型及加号运算
程序中+使用: 1.两侧是数值型,则相加: 2.一方为字符串,则拼接: 3.运算顺序从做到右: 数据类型 每一种数据都定义了明确的数据类型,在内存中分配了不同大小的内存空间: java数据类型 基本数 ...
- Day 23 23.2.1:微信公众平台案例
微信公众平台案例 注意:接下来将的内容,请忽视具体网站,重点专注逆向的分析思路! 接下来就是爬什么网站,什么数据,什么形式都统统不重要!重点是分析思路 微信公众平台案例 url:https://mp. ...
- Appium的触屏操作&设备交互api
Appium的触屏操作 TouchAction---Appium 2.0以上不在可以使用 官网地址:https://github.com/appium/appium/blob/master/docs/ ...
- C# Post调用接口并传递json参数
1 public string Post(string Url, string jsonParas) 2 { 3 string strURL = Url; 4 //创建一个HTTP请求 5 HttpW ...
- Codeforces 1228A、Distinct Digits
原题 原题网址 题目大意 给定一个区间(上下界都是整数),判断该区间内是否存在一个整数的数字两两不同. 数据结构 一个数组flag,记录0-9是否出现过. 思路 外层循环枚举该区间内所有整数. 首先初 ...
- Docker之Nginx保姆级别安装
Docker之Nginx保姆级别安装: 如果觉得样式不好:跳转即可 http://www.lifengying.site/(md文件复制过来有些样式会不一样) 学英语网站项目:自己先保证Redis.N ...
- Linux安装Jemalloc
在安装Jemalloc之前首选安装解压工具,Jemalloc源来自Github一般服务器很少安装bzip2解压 bzip2安装命令 yum -y install bzip2 CnetOS完整安装Jem ...
- .net core解决时间格式转换问题或日期取当前时间
一.时间格式转换 1.新建一个格式化类DatetimeJsonConverter,继承自JsonConverter,然后重写里面的方法 public class DatetimeJsonConvert ...