使用 Sinamics S120 驱动脚本配置扩展报文
为了传输故障代码、电流、温度等信息。通常需要使用扩展报文的方式来发送这些信息。在驱动数量较少的情况下,可以进行手动配置。
如果驱动数量很多,可以使用脚本script的方式来配置扩展报文。
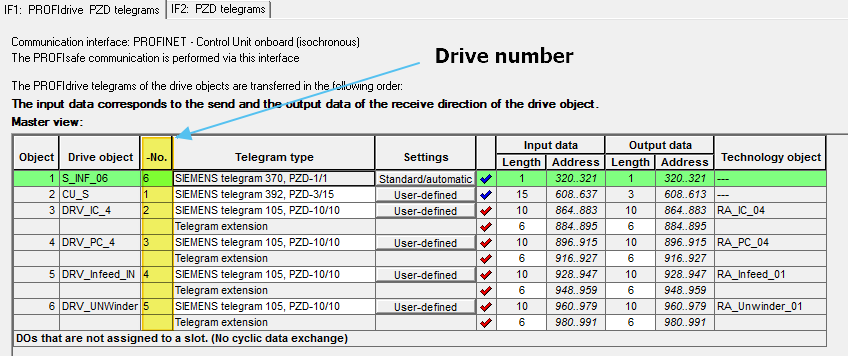
驱动编号
注意下图中的Drive Number,表示驱动在 CU(control unit)中的编号, 脚本中需要使用这个编号
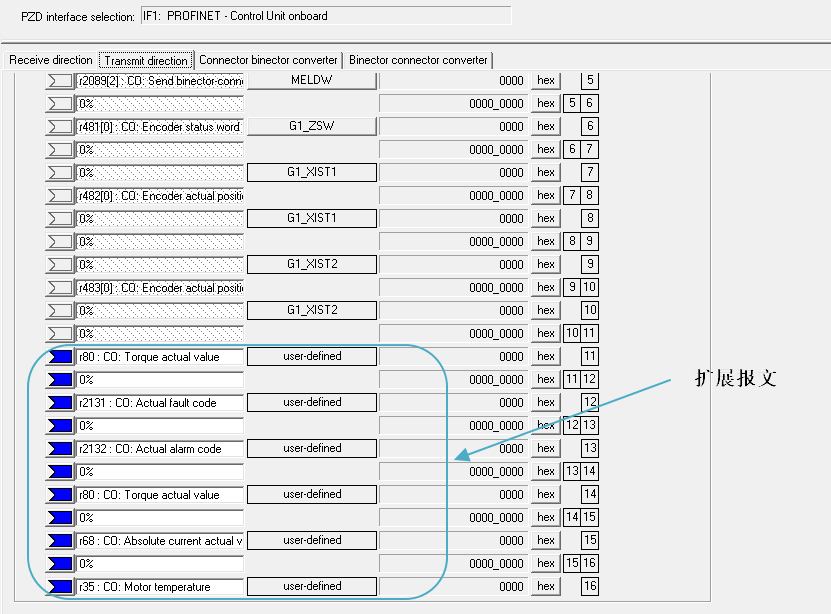
以下脚本,给报文增加如下内容
receive word 10, r80 电机扭矩
receive word 11, r2131 驱动故障代码
receive word 12, r2132 电机扭矩
receive word 13, r80 电机扭矩
receive word 14, r68 电机电流
receive word 15, r35 电机温度
使用以下脚本时,需要
- 将设备名称替换为你项目中的CU名称
- 将驱动名称替换为你项目中的驱动
- 检查Drive Number是否正确
' Script_1
'r80 torque actual value
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,10) = "80 : 0 : 2" ' receive word 10
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,10) = "80 : 0 : 3" ' receive word 10
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,10) = "80 : 0 : 4" ' receive word 10
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,10) = "80 : 0 : 5" ' receive word 10
'r2131 fault number
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,11) = "2131 : 0 : 2" ' receive word 11
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,11) = "2131 : 0 : 3" ' receive word 11
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,11) = "2131 : 0 : 4" ' receive word 11
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,11) = "2131 : 0 : 5" ' receive word 11
'r2132 alarm number
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,12) = "2132 : 0 : 2" ' receive word 12
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,12) = "2132 : 0 : 3" ' receive word 12
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,12) = "2132 : 0 : 4" ' receive word 12
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,12) = "2132 : 0 : 5" ' receive word 12
'r80 torque actual value
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,13) = "80 : 0 : 2" ' receive word 13
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,13) = "80 : 0 : 3" ' receive word 13
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,13) = "80 : 0 : 4" ' receive word 13
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,13) = "80 : 0 : 5" ' receive word 13
'r68 current
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,14) = "68 : 0 : 2" ' receive word 14
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,14) = "68 : 0 : 3" ' receive word 14
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,14) = "68 : 0 : 4" ' receive word 14
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,14) = "68 : 0 : 5" ' receive word 14
'r35 motor temperature
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_IC_4").Parameters(2051,15) = "35 : 0 : 2" ' receive word 15
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_PC_4").Parameters(2051,15) = "35 : 0 : 3" ' receive word 15
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_Infeed_IN").Parameters(2051,15) = "35 : 0 : 4" ' receive word 15
PROJ.Devices("S120xCU320x2xPN4").TOs("DRV_UNWinder").Parameters(2051,15) = "35 : 0 : 5" ' receive word 15
使用 Sinamics S120 驱动脚本配置扩展报文的更多相关文章
- SINAMICS S120的核心控制单元CU320使用教程,电机模块接线
SINAMICS是西门子公司新一代的驱动产品,它正在逐步取代现有的MASTERDRIVES及SIMODRIVE系列的驱动系统.SINAMICS S120是集V/f控制.矢量控制和伺服控制于一体的多轴驱 ...
- 通过DP总线实现S7-300/400与SINAMICS S120 通讯
一.DP总线通讯功能概述 S7-300/400与SINAMICS S120 之间通过DP总线可进行周期性及非周期性数据通讯. 使用标准S7功能块SFC14/SFC15,S7-300/400PLC通过P ...
- 迅为iTOP-4418/6818开发板-驱动-实现GPIO扩展
实现 GPIO 扩展,先弄清楚“复用”的概念,将调用这些 GPIO 的驱动去掉配置,重新编译,加到自己的驱动中,就可以实现扩展的 GPIO 的输入和输出.另外必须要先看文档“迅为iTOP-4418开发 ...
- php中的脚本加速扩展opcache
今儿在azure里装php5.5.4,发现原先php5.4.php5.3中的zend guard laoder以及php5.2中的Zend Optimizer均不能再用,一直很喜欢用的eacceler ...
- Linux、UNIX设置开机自动运行命令、脚本配置
一般我们不建议人工部署开机自动启动的脚本.而是建议通过crontab 部署脚本监控,理由如下: 1.自动开机部署脚本不好定位问题,有可能导致主机重启过慢. 2.自动开机部署脚本不好定位问题,有可能导致 ...
- 五十八.Kibana使用 、 Logstash配置扩展插件
1.导入数据 批量导入数据并查看 1.1 导入数据 1) 使用POST方式批量导入数据,数据格式为json,url 编码使用data-binary导入含有index配置的json文件 ]# ...
- 1-1. OSS/ALSA 声卡的驱动与配置和 Madplay 嵌入式播放器的移植
报警子系统 一. OSS/ALSA 声卡的驱动与配置 声卡驱动中传统的OSS构架在02年被收购后即不开源,并且OSS的混音效果不好->因此ALSA构架孕育而生. ALSA(高级音频构架,目前应用 ...
- 基于VMware的eCos环境编译redboot(脚本配置redboot)
基于VMware的ecos,redboot及hello world(1)安装请参照[[ecos学习2]wmware运行redboot[方法二]--图形实现配置 ] (2)修改内存布局文件:~/i386 ...
- Linux本地网络脚本配置(内网与外网)
脚本位于: /etc/sysconfig/network-scripts/ifcfg-eth0 DEVICE=eth0 //网卡的名字 BOOTPROTO=static // none静态IP ...
随机推荐
- SpringBoot项目中获取applicationContext对象
ApplicationContext 对象是Spring开源框架的上下文对象实例,也就是我们常说的Spring容器,一般情况下我们是不用手动来管理它,而是由Spring框架自己来维护bean之间的关系 ...
- uwsgi错误invalid request block size
uwsgi错误invalid request block size 今天使用uwsgi启动django代码,然后打开浏览器输入http://localhost:8000/admin.后台出现下面错误 ...
- OAuth2.0 微信授权机制
我在了解设计Restful接口的时候,发现涉及到接口验证,可以利用OAuth2.0机制来验证. 我开发的微信端Web网页通过微信授权的时候,微信端也是用OAuth2.0机制来获取用户基本信息. OAu ...
- [转]Add Bootstrap Glyphicon to Input Box
本文转自:http://stackoverflow.com/questions/18838964/add-bootstrap-glyphicon-to-input-box How can I add ...
- 有意思的MySQL之最
写在前面 在平时工作中特别是架构设计阶段,咨询量最多的也就是MySQL之最了,在不经意间发现原来MySQL手册里面已经列举了,顺手拿来翻译下,如果有翻译错误或者不当的地方,欢迎批评指正. 最大和最小 ...
- android 生成随机数
/** * 随机数.字母 工具类 * Created by admin on 2017/2/20. */ public class RandomUntil { /** * 生成 ...
- ODBC, OLEDB, ADO, ADO.NET
在SSIS中,选择Connction Manager时,有很多的类型.其中会发现如下4个连接类型ODBC, OLEDB, ADO, ADO.NET.这4个东东到底是什么,他们有什么关联,什么区别,如何 ...
- 点击select下拉框,触发事件
<div class="controls moneycheck floatleft"> <select class="span12 chosen_cat ...
- T_SQL 语句想已有数据表添加约束
如果向存在数据的表里添加约束,有可能会出现数据不符合检查约束而造成添加约束失败. 如: USE DEmo--指向当前操作的数据库 GO ALTER TABLE Employee ADD CONSTRA ...
- Mysql插入Emoji表情出错
Caused by: java.sql.SQLException: Incorrect at com.mysql.jdbc.SQLError.createSQLException(SQLError.j ...