ROS:使用Qt Creator创建GUI程序(一)
开发环境:
Ubuntu14.04
ROS indigo version
Qt Creator 3.0.1 based on Qt 5.2.1
步骤如下:(按照下面命令一步步来,亲测可行)
(一)安装qt-ros相关的包打开终端,输入下面的命令:
$ sudo apt-get install ros-indigo-qt-create
$ sudo apt-get install ros-indigo-qt-build
(二)创建一个Qt ROS GUI 模板程序打开终端,输入下面的命令:
$ mkdir -p ~/qt_ros_gui_test_ws/src/
$ cd ~/qt_ros_gui_test_ws/src/
$ catkin_create_qt_pkg qt_ros_gui_node

$ cd ~/qt_ros_gui_test_ws/$ catkin_make
$ cd ~/qt_ros_gui_test_ws/src/
$ sed -i '' CMakeLists.txt
输入sed -i '' CMakeLists.txt命令前:

输入sed -i '' CMakeLists.txt命令后:

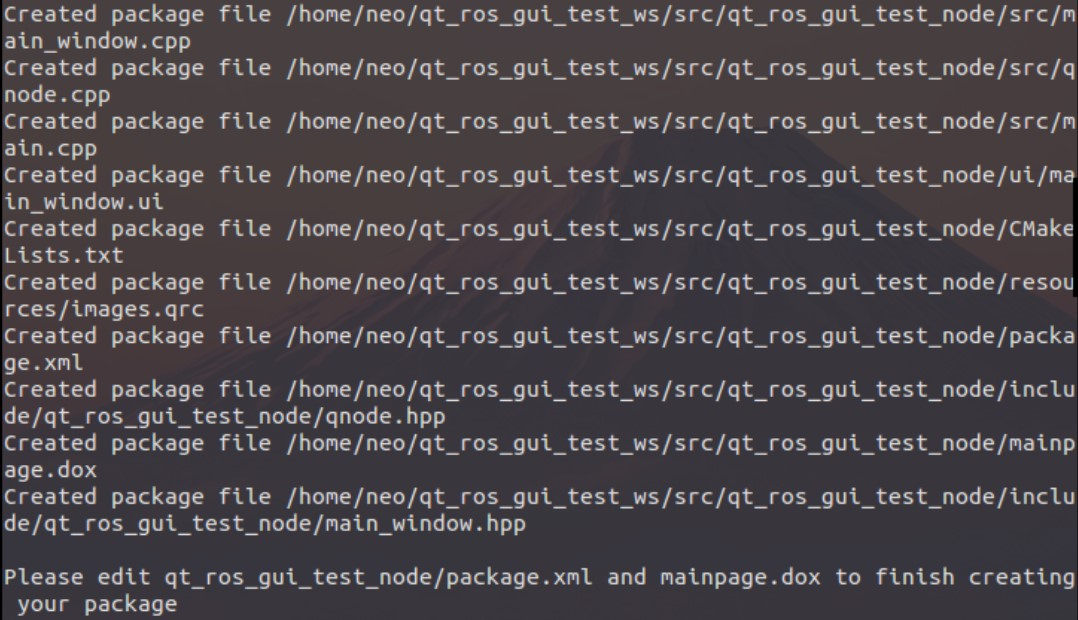
// 使用sed -i '' CMakeLists.txt命令原因:In order to avoid driving QtCreator mad,
we must replace the symlink’ed CMakeLists.txt in catkin_ws/src with a physical
copy of the actual stuff;如果未输入此命令,会出现以下错误,如图:

(三)安装Qt Creator打开终端,输入下面的命令:
$ sudo apt-get install qtcreator安装成功后,输入下面的命令:
$ qtcreator
// 注意:一定要从终端启动qtcreator,不可以在搜索栏那里点击图标启动,
否则将无法source到ros相关的路径,会导致后面在Qt编译的时候出现找不
到catkin package等编译错误!!!
①启动后如下:
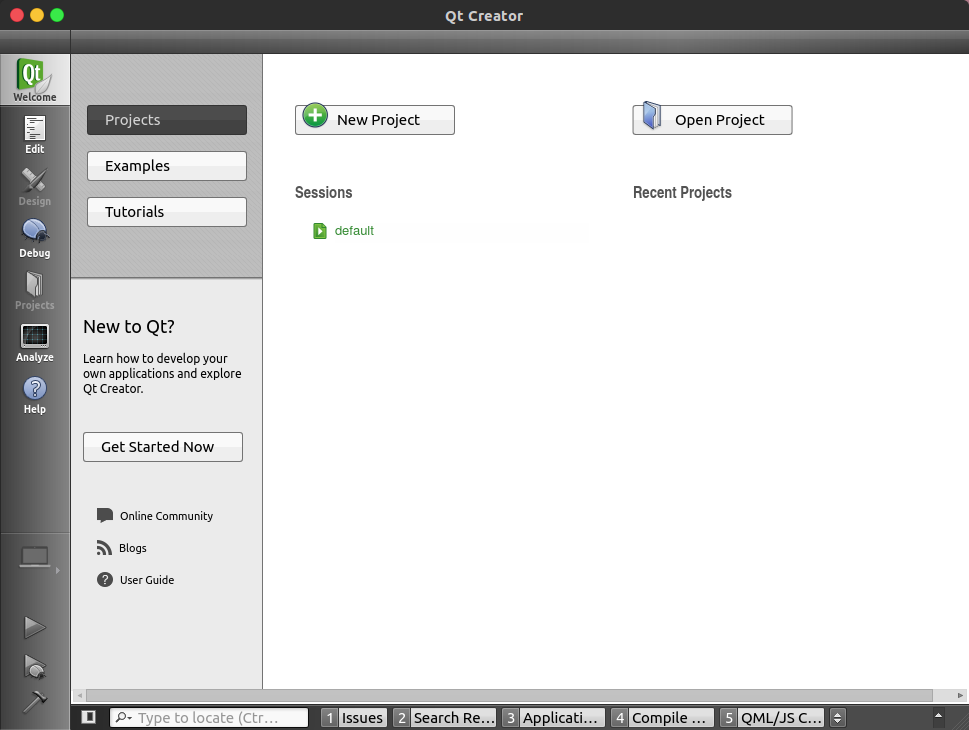
②点击上述Open Project, 出现以下画面:
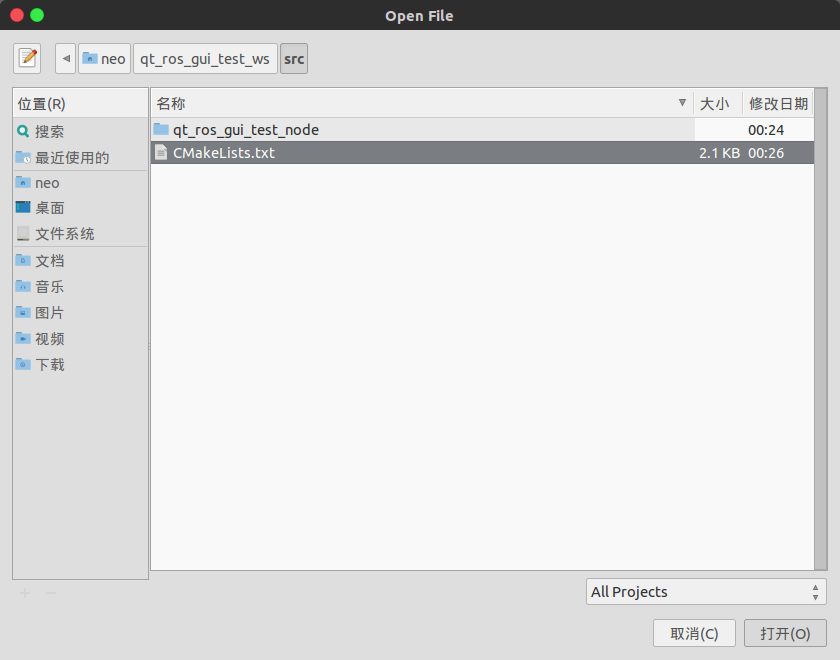
③选择上述CMakeLists.txt文件,点击打开,出现以下画面:
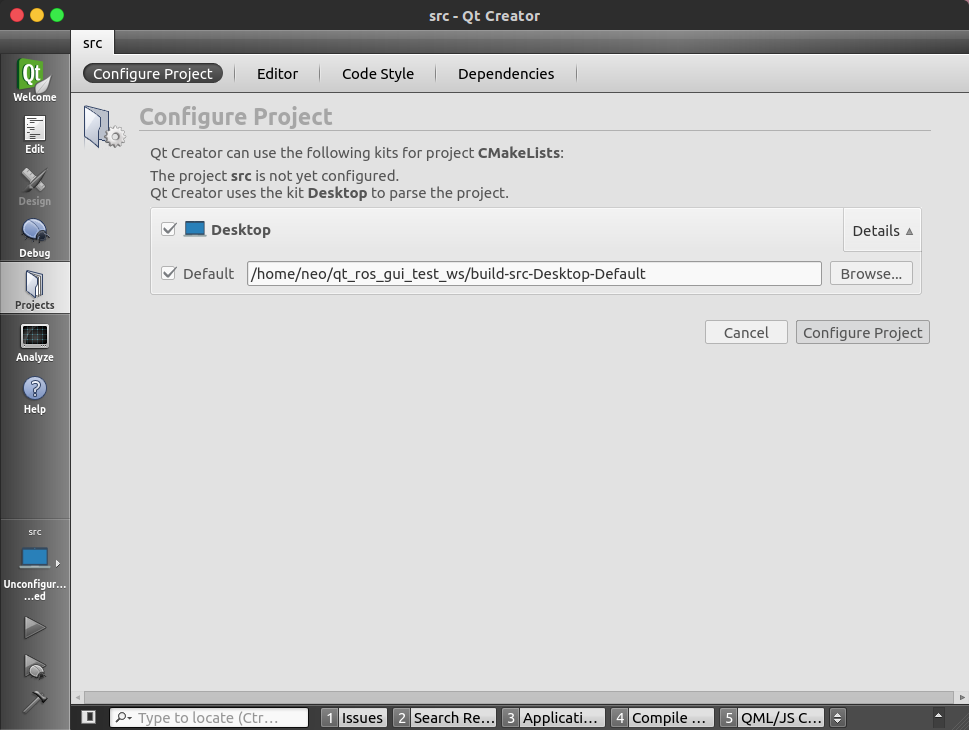
④点击上述Browse...,出现以下画面:

⑤选择build文件夹,点击打开,出现以下画面:
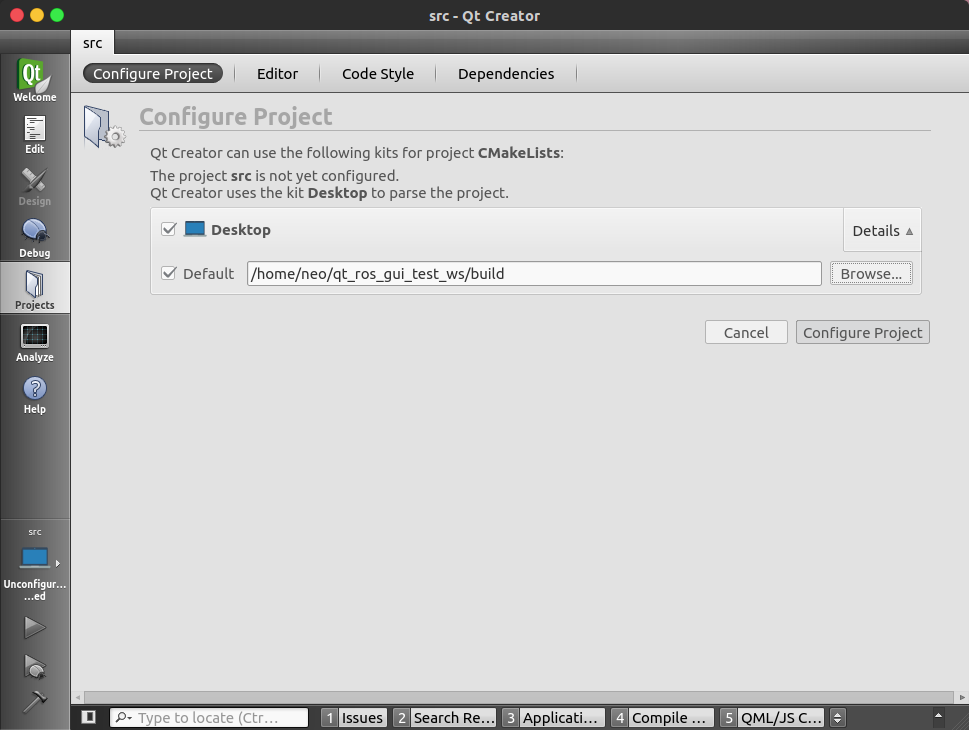
⑥点击Configure Project, 出现以下画面:
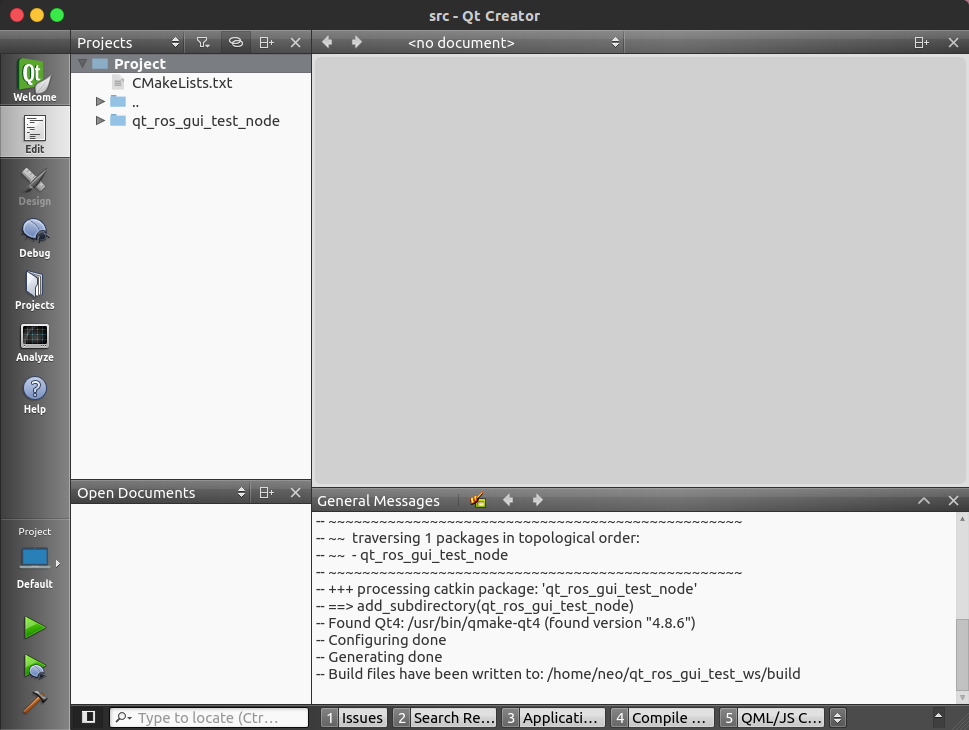

⑦点击绿色三角形符号,运行程序如下:

至此,您已成功创建一个Qt ROS GUI 程序了!
ROS:使用Qt Creator创建GUI程序(一)的更多相关文章
- PyQt5 - 01 使用qt creator创建第一个pyqt5界面程序
1. 安装Qt Creator qt creator下载点我 2. 利用Qt Creator创建界面 点击文件 -> 新建文件或项目 选择Qt -> Qt设计师界面类 选择一个模版,创建一 ...
- 如何在Qt Creator 创建一个.pri文件
如何在Qt Creator 创建一个.pri文件 2013年10月09日 ⁄ 综合 ⁄ 共 254字 ⁄ 字号 小 中 大 ⁄ 评论关闭 这个问题很少人写,因为比较简单,但是让却让我花了好大功夫才 ...
- 用qt creator创建可继承ui类
https://jingyan.baidu.com/article/5d368d1efa2dd73f60c05786.html 用qt creator创建可继承ui类 听语音 | 浏览:1657 | ...
- ubuntu下借助qt creator创建属于自己的共享库
简介: 在 Windows 上,共享库由 .dll 表示:在 Linux 上,由 .so 表示. Shared Library的优势 共享库,又称动态库或so文件,顾名思义,它可以在可执行文件启动时加 ...
- QT +go 开发 GUI程序
,转载 https://blog.csdn.net/lanbery/article/details/81745611 如果你是一个墨守成规的coding,请移步其他内容,这部分内容可能不适合你.如 ...
- Qt Creator开发的程序提升到管理员权限运行
一些功能需要管理员权限,例如启动一个服务,这就需要exe在管理员权限下运行,一个方法是在exe上右键,选择“以管理员身份运行”,或者右键-属性-兼容性-勾选“以管理员身份运行此程序” 另一个方法是在程 ...
- Qt creator 创建鼠标右键菜单 (不新建类)
界面 步骤 打开你的界面文件并选中你要添加右键的控件,选择“CustomContextMenu” 右键选择“转到槽...” -> customContextMenuRequested 插入下面代 ...
- [转载]ROS开发环境之Qt Creator
ROS开发环境之Qt Creator(http://my.phirobot.com/blog/2013-12-ros_ide_qtcreator.html) Created at: 2013-12-2 ...
- 第五章 体验Qt Creator的神奇魅力
第五章 体验Qt Creator的神奇魅力 Qt Creator是官方提供的一个轻量级IDE(集成开发环境),功能强大,是程序员快速开发程序的有力助手.下面我们用它实现一个helloworld工程. ...
随机推荐
- linux内核中默认logo的具体位置
/driver/logo/... 以下这个目录下对应的是logo的设置
- 【图的DFS】图的DFS非递归算法
在DFS的递归算法中,DFS框架如下: 1访问起点v0 2依次以v0的未访问的连接点为起点,DFS搜索图,直至图中所有与v0路径相通的顶点都被访问. 3若该图为非连通图,则图中一定还存在未被访问的顶点 ...
- c# 单元测试工程如何取得当前项目路径
前言: C#工程项目中有些配置文件,数据文件等不是C#工程文件,但是程序中需要访问,如果写成绝对路径不利于程序的迁移,所以必须写成相对路径.取得相对路径的方法很多,网上的例子也很多,基本上是七种吧,这 ...
- 【Android 应用开发】Android屏幕适配解析 - 详解像素,设备独立像素,归一化密度,精确密度及各种资源对应的尺寸密度分辨率适配问题
. 作者 :万境绝尘 转载请注明出处 : http://blog.csdn.net/shulianghan/article/details/19698511 . 最近遇到了一系列的屏幕适配问题, 以及 ...
- 用C语言实现Ping程序功能
本文转载自:http://www.ibm.com/developerworks/cn/linux/network/ping/ ping命令是用来查看网络上另一个主机系统的网络连接是否正常的一个工具.p ...
- Android下NDK开发环境搭建
Android下NDK开发环境搭建 1. AndroidNDK安装与配置 1.1 NDK简介 Android NDK是一套允许开发人员使用本地代码(如C/C++)进行Android APP部 ...
- ANN实现
ANN核心数据结构: typedef struct { int input_n; /* number of input units */ int h ...
- Linux自动安装JDK的shell脚本
Linux自动安装JDK的shell脚本 A:本脚本运行的机器,Linux B:待安装JDK的机器, Linux 首先在脚本运行的机器A上确定可以ssh无密码登录到待安装jdk的机器B上,然后就可以在 ...
- Working with bounded Task Flows
Working with Bounded Task Flows, Regions and Routers in JDeveloper 11g Purpose In this tutorial, y ...
- iOS和OS X中的bundle
bundle也可以称之为包(package). 它在iOS和OS X中实际为一个文件夹但却当成单独的文件来对待. 每一个app都有一个bundle,并且你可以通过在xxx.app图标上右击鼠标然后选择 ...