Eigen::Matrix与array数据转换
1. 数组转化为Eigen::Matrix
int array[]; cout << "colMajor matrix = \n" << Map<Matrix3i>(array) << endl; // map a contiguous array as a column-major matrix
cout << "rowMajor matrix = \n" << Map<Matrix<int, , , RowMajor>>(array) << endl; // map a contiguous array as a row-major matrix Map<MatrixXi> eigMat1(array, , ); // eigMat1和array指向的是同一个内存空间,是绑定在一起的
MatrixXi eigMat2 = Map<MatrixXi>(array, , ); // eigMat1和array指向不同的内存空间,互不影响
2. Eigen::Matrix转化为数组
Matrix3d eigMat; double* eigMatptr = eigMat.data();
double* eigMatptrnew = new double[eigMat.size()];
Map<MatrixXd>(eigMatptrnew, eigMat.rows(), eigMat.cols()) = eigMat;
3.更多转化
下面的代码是我写的互相转化的测试
#include <iostream>
#include <vector>
#include <Eigen/Dense> using namespace std;
using namespace Eigen; void array2eigenMat();
void eigenMat2array(); void array2eigenVec();
void eigenVec2array(); void vector2eigenMat();
void eigenMat2vector(); void vector2eigenVec();
void eigenVec2vector(); int main()
{
cout << "hello world" <<endl;
array2eigenMat();
eigenMat2array(); array2eigenVec();
eigenVec2array(); vector2eigenMat();
eigenMat2vector(); vector2eigenVec();
eigenVec2vector();
return ;
} void array2eigenMat()
{
cout << "-------------------------- array2eigenMat --------------------------" << endl; int array[];
for (int i = ; i < ; ++i) array[i] = i;
cout << "array = [ "; for (int i = ; i < ; ++i) cout << array[i] << " "; cout << "]" << endl; cout << "colMajor matrix = \n" << Map<Matrix3i>(array) << endl; // map a contiguous array as a column-major matrix
cout << "rowMajor matrix = \n" << Map<Matrix<int, , , RowMajor>>(array) << endl; // map a contiguous array as a row-major matrix cout << "stride matrix = \n" << Map<MatrixXi, , OuterStride<>>(array, , , OuterStride<>()) << endl;
//mapping an array while specifying an outer stride. Here, since we're mapping as a column-major matrix,
// 'outer stride' means the pointer increment between two consecutive columns Map<MatrixXi> eigMat1(array, , );
MatrixXi eigMat2 = Map<MatrixXi>(array, , );
array[] = ; cout << "eigMat1 matrix = \n"; cout << eigMat1 << endl;
cout << "eigMat2 matrix = \n"; cout << eigMat2 << endl;
cout << "---------------------------------------------------------------------" << endl; }
void eigenMat2array()
{
cout << "-------------------------- eigenMat2array --------------------------" << endl;
Matrix3d eigMat;
eigMat <<
, , ,
, , ,
, , ;
cout << "init eigMat = \n"; cout << eigMat << endl; double* eigMatptr = eigMat.data();
cout << "array = [ "; for (int i = ; i < ; ++i) cout << eigMatptr[i] << " "; cout << "]" << endl; eigMat(, ) = ;
cout << "array = [ "; for (int i = ; i < ; ++i) cout << eigMatptr[i] << " "; cout << "]" << endl; double *eigMatptrnew = new double[eigMat.size()];
Map<MatrixXd>(eigMatptrnew, eigMat.rows(), eigMat.cols()) = eigMat; eigMat(, ) = ;
cout << "init matrix = \n"; cout << eigMat << endl;
cout << "array = [ "; for (int i = ; i < ; ++i) cout << eigMatptr[i] << " "; cout << "]" << endl;
cout << "---------------------------------------------------------------------" << endl;
} void array2eigenVec()
{
cout << "-------------------------- array2eigenVec --------------------------" << endl; int array[];
for (int i = ; i < ; ++i) array[i] = i;
cout << "data array = [ "; for (int i = ; i < ; ++i) cout << array[i] << " "; cout << "]" << endl; Map<VectorXi> eigVec(array, );
cout << "eigen vector transpose = " << eigVec.transpose() << endl;
cout << "stride vector transpose = " << Map<VectorXi, , InnerStride<> >(array, ).transpose() << endl;
// map an array as a vector, specifying an inner stride, that is, the pointer increment between two consecutive coefficients array[] = ;
cout << "eigen vector transpose = " << eigVec.transpose() << endl;
cout << "stride vector transpose = " << Map<VectorXi, , InnerStride<> >(array, ).transpose() << endl; cout << "---------------------------------------------------------------------" << endl;
}
void eigenVec2array()
{
cout << "-------------------------- eigenVec2array --------------------------" << endl;
VectorXf eigvec();
eigvec << , , , , ;
cout << "eigen vector transpose = " << eigvec.transpose() << endl; float *array = new float;
array = eigvec.data();
cout << "data array = [ "; for (int i = ; i < eigvec.size(); ++i) cout << array[i] << " "; cout << "]" << endl; eigvec() = ;
cout << "data array = [ "; for (int i = ; i < eigvec.size(); ++i) cout << array[i] << " "; cout << "]" << endl; array[] = ;
cout << "eigen vector transpose = " << eigvec.transpose() << endl; cout << "---------------------------------------------------------------------" << endl;
} void vector2eigenMat()
{
cout << "-------------------------- vector2eigenMat --------------------------" << endl;
vector<int> stdvec{ , , , , , , , , };
Map<Matrix<int, , , RowMajor>> eigMat1(stdvec.data());
MatrixXi eigMat2 = Map<Matrix<int, , , RowMajor>>(stdvec.data()); cout << "eigMat1 matrix = \n"; cout << eigMat1 << endl;
cout << "eigMat2 matrix = \n"; cout << eigMat2 << endl; stdvec[] = ;
cout << "eigMat1 matrix = \n"; cout << eigMat1 << endl;
cout << "eigMat2 matrix = \n"; cout << eigMat2 << endl; cout << "---------------------------------------------------------------------" << endl;
}
void eigenMat2vector()
{
cout << "-------------------------- eigenMat2vector --------------------------" << endl;
Matrix3d eigMatCol;
eigMatCol <<
, , ,
, , ,
, , ;
cout << "eigen matrix col = \n"; cout << eigMatCol << endl;
vector<double> stdvec1(eigMatCol.data(), eigMatCol.data() + eigMatCol.size());
cout << "std vector1 = ["; for (int i = ; i < stdvec1.size(); ++i) cout << stdvec1[i] << " "; cout << "]" << endl; Matrix<double, , , RowMajor> eigMatRow = eigMatCol;
cout << "eigen matrix row = \n"; cout << eigMatCol << endl;
vector<double> stdvec2(eigMatRow.data(), eigMatRow.data() + eigMatRow.size());
cout << "std vector2 = ["; for (int i = ; i < stdvec2.size(); ++i) cout << stdvec2[i] << " "; cout << "]" << endl; cout << "---------------------------------------------------------------------" << endl;
} void vector2eigenVec()
{
cout << "-------------------------- vector2eigenVec --------------------------" << endl;
vector<int> stdvec{ , , , , };
cout << "std vector = ["; for (int i = ; i < stdvec.size(); ++i) cout << stdvec[i] << " "; cout << "]" << endl; Map<VectorXi> eigVec1(stdvec.data(), stdvec.size());
VectorXi eigVec2 = Map<VectorXi>(stdvec.data(), stdvec.size());
cout << "eigen vector1 transpose = " << eigVec1.transpose() << endl;
cout << "eigen vector2 transpose = " << eigVec2.transpose() << endl;
cout << "stride vector transpose = " << Map<VectorXi, , InnerStride<> >(stdvec.data(), ).transpose() << endl; stdvec[] = ;
cout << "eigen vector1 transpose = " << eigVec1.transpose() << endl;
cout << "eigen vector2 transpose = " << eigVec2.transpose() << endl; cout << "stride vector transpose = " << Map<VectorXi, , InnerStride<> >(stdvec.data(), ).transpose() << endl; cout << "---------------------------------------------------------------------" << endl;
}
void eigenVec2vector()
{
cout << "-------------------------- eigenVec2vector --------------------------" << endl;
VectorXf eigvec();
eigvec << , , , , ;
cout << "eigen vector transpose = " << eigvec.transpose() << endl; vector<float> stdvec(eigvec.data(), eigvec.data() + eigvec.size());
cout << "std vector = ["; for (int i = ; i < stdvec.size(); ++i) cout << stdvec[i] << " "; cout << "]" << endl; eigvec() = ;
cout << "std vector = ["; for (int i = ; i < stdvec.size(); ++i) cout << stdvec[i] << " "; cout << "]" << endl;
cout << "---------------------------------------------------------------------" << endl;
}
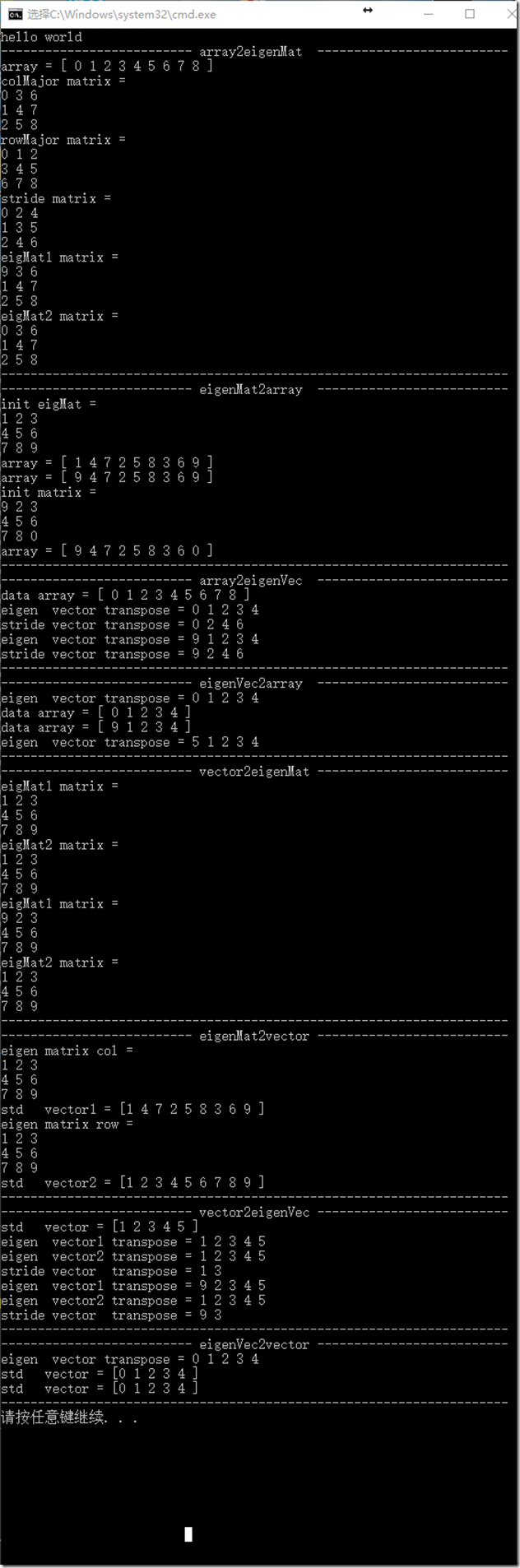
程序运行结果
4. 参考
1. Eigen::Map
2. Eigen quick reference guide
3. Vlad's Blog
Eigen::Matrix与array数据转换的更多相关文章
- Eigen学习之Array类
Eigen 不仅提供了Matrix和Vector结构,还提供了Array结构.区别如下,Matrix和Vector就是线性代数中定义的矩阵和向量,所有的数学运算都和数学上一致.但是存在一个问题是数学上 ...
- eigen Matrix详解
Eigen Matrix 详解 在Eigen中,所有的matrices 和vectors 都是模板类Matrix 的对象,Vectors 只是一种特殊的矩阵,行或者列为1. Matrix的前三个模板参 ...
- numpy中的matrix与array的区别
Numpy matrices必须是2维的,但是 numpy arrays (ndarrays) 可以是多维的(1D,2D,3D····ND). Matrix是Array的一个小的分支,包含于Array ...
- Numpy中matrix()和array()的区别
matrix() 和 array() 的区别,主要从以下方面说起: 1. 矩阵生成方式不同 import numpy as np a1 = np.array([[1, 2], [3, 4]]) b1 ...
- Python与线性代数——Numpy中的matrix()和array()的区别
Numpy中matrix必须是2维的,但是 numpy中array可以是多维的(1D,2D,3D····ND).matrix是array的一个小的分支,包含于array.所以matrix 拥有arra ...
- 73. Set Matrix Zeroes (Array)
Given a m x n matrix, if an element is 0, set its entire row and column to 0. Do it in place. Follow ...
- 59. Spiral Matrix II (Array)
Given an integer n, generate a square matrix filled with elements from 1 to n2 in spiral order. For ...
- Joint Approximative Diagonalization of Eigen matrix (JADE)
特征矩阵联合相似对角化算法[1]. Cardoso于1993年提出的盲信号分离具有代表性的一种算法.是一种基于四阶累积量特征矩阵近似联合对角化盲分离算法.该算法将目标函数最大化问题等价于一组四阶累积量 ...
- array和matrix
array:数组 matrix:矩阵 list:列表 a = [[1,2,3],[4,5,6]] 两种array的定义方式,第一种方式可以看出list不是array,但却有很大的联系 a = np.a ...
随机推荐
- MySQL报错: SQLSTATE[HY000]: General error: 1030 Got error 28 from storage engine
执行命令:df -h [root@iZ25z6qcmrhZ ~]# df -hFilesystem Size Used Avail Use% Mounted on/dev/xvda1 40G 38G ...
- 解决类似umount target is busy挂载盘卸载不掉问题
问题描述: Linux下挂载后的分区或者磁盘某些时候需要umount的时候出现类似“umount: /mnt: target is busy.”等字样,或者“umount: /xxx: device ...
- npm后台启动nuxt服务之 kill
后台启动 npm run start & ps aux | grep start 根据项目对应的id执行如下命令 kill xxxx
- source insight如何删除没用的project 及其常见问题
4年09月05日 ⁄ 综合 ⁄ 共 439字 ⁄ 字号 小 中 大 ⁄ 评论关闭 我正在中文路径下加载了一个工程,结果一点击打开,source insight程序就会出现错误提示,要求关闭.我想可能是 ...
- Python常用模块-时间模块
在写代码的过程中,我们常常需要与时间打交道,在python中,与时间处理有关的模块有time,datetime和calendar.,这里主要介绍time和datetime模块 在python中,表示时 ...
- Entity Framework入门教程(8)---预先加载、延迟加载、显示加载
1.预先加载 预先加载:在对一种类型的实体进行查询时,将相关的实体作为查询的一部分一起加载.预先加载可以使用Include()方法实现. 1.加载一个相关实体类型 栗子:使用Include()方法从数 ...
- linux在线安装JDK(1.8版本)
在线下载JDK 命令: wget --no-check-certificate --no-cookies --header "Cookie: oraclelicense=accept-sec ...
- SHELL希尔排序
/****************************************************************************** * Compilation: javac ...
- tex 进度条
\documentclass{beamer} \usepackage{tikz} \usetikzlibrary{calc} \definecolor{pbblue}{HTML}{0A75A8}% f ...
- Geometric regularity criterion for NSE: the cross product of velocity and vorticity 4: $u\cdot \om$
在 [Berselli, Luigi C.; Córdoba, Diego. On the regularity of the solutions to the 3D Navier-Stokes eq ...