[转]ORB特征提取-----FAST角点检测
转载地址:https://blog.csdn.net/maweifei/article/details/62887831
(一)ORB特征点提取算法的简介
Oriented FAST and Rotated BRIEF,简称ORB,该特征检测算子是在著名的FAST特征检测和BRIEF特征描述子的基础上提出来的,其运行时间远远优于SIFT和SURF,可应用于实时性特征检测。ORB特征检测具有尺度和旋转不变性,对于噪声及其透视变换也具有不变性,良好的性能是的利用ORB在进行特征描述时的应用场景十分广泛。ORB特征检测主要分为以下两个步骤:(1)方向FAST特征点检测(2)BRIEF特征描述。
(二)方向FAST特征点检测
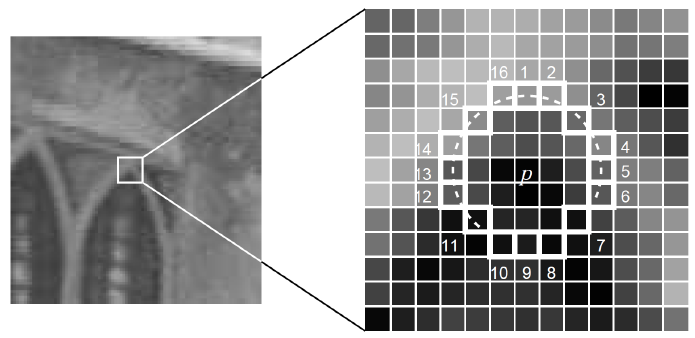
步骤一:粗提取。该步能够提取大量的特征点,但是有很大一部分的特征点的质量不高。下面介绍提取方法。从图像中选取一点P,如上图1。我们判断该点是不是特征点的方法是,以P为圆心画一个半径为3pixel的圆。圆周上如果有连续n个像素点的灰度值比P点的灰度值大或者小,则认为P为特征点。一般n设置为12。为了加快特征点的提取,快速排出非特征点,首先检测1、9、5、13位置上的灰度值,如果P是特征点,那么这四个位置上有3个或3个以上的的像素值都大于或者小于P点的灰度值。如果不满足,则直接排出此点。
步骤二:机器学习的方法筛选最优特征点。简单来说就是使用ID3算法训练一个决策树,将特征点圆周上的16个像素输入决策树中,以此来筛选出最优的FAST特征点。
步骤三:非极大值抑制去除局部较密集特征点。使用非极大值抑制算法去除临近位置多个特征点的问题。为每一个特征点计算出其响应大小。计算方式是特征点P和其周围16个特征点偏差的绝对值和。在比较临近的特征点中,保留响应值较大的特征点,删除其余的特征点。
步骤四:特征点的尺度不变形。建立金字塔,来实现特征点的多尺度不变性。设置一个比例因子scaleFactor(opencv默认为1.2)和金字塔的层数nlevels(pencv默认为8)。将原图像按比例因子缩小成nlevels幅图像。缩放后的图像为:I’=
I/scaleFactork(k=1,2,…, nlevels)。nlevels幅不同比例的图像提取特征点总和作为这幅图像的oFAST特征点。
步骤五:特征点的旋转不变性。ORB算法提出使用矩(moment)法来确定FAST特征点的方向。也就是说通过矩来计算特征点以r为半径范围内的质心,特征点坐标到质心形成一个向量作为该特征点的方向。矩定义如下:

其中,I(x,y)为图像灰度表达式。该矩的质心为:
假设角点坐标为O,则向量的角度即为该特征点的方向。计算公式如下:

- /********************************************************************************************************
- 文件说明:
- FAST角点检测
- 开发环境:
- Win7 + OpenCv2.4.8 + VS2012
- 时间地点:
- 陕西师范大学 2017.3.17
- 作 者:
- 九 月
- *********************************************************************************************************/
- #include <opencv2/core/core.hpp>
- #include <opencv2/highgui/highgui.hpp>
- #include <opencv2/imgproc/imgproc.hpp>
- #include <opencv2/features2d/features2d.hpp>
- using namespace cv;
- using namespace std;
- int main(int argc, char** argv)
- {
- cv::Mat img = imread("hand1.jpg");
- std::vector<cv::KeyPoint> keypoints;
- cv::FastFeatureDetector fast(15); // 检测的阈值为50
- fast.detect(img, keypoints);
- cv::Mat img_keypoints;
- cv::drawKeypoints(img, keypoints, img_keypoints, Scalar::all(-1), DrawMatchesFlags::DEFAULT);
- cv::imshow("Keypoints", img_keypoints);
- cv::waitKey(0);
- return 0;
- }

参考资料:
1)http://blog.csdn.net/hujingshuang/article/details/46898007
2)http://m.blog.csdn.net/article/details?id=52625678
3)http://download.csdn.net/detail/yang843061497/7785917
4)http://www.cvchina.info/2011/07/04/whats-orb/
5)http://blog.sina.com.cn/s/blog_916b71bb0100w9al.html
[转]ORB特征提取-----FAST角点检测的更多相关文章
- 第十四节、FAST角点检测(附源码)
在前面我们已经陆续介绍了许多特征检测算子,我们可以根据图像局部的自相关函数求得Harris角点,后面又提到了两种十分优秀的特征点以及他们的描述方法SIFT特征和SURF特征.SURF特征是为了提高运算 ...
- FAST特征点检测
Features From Accelerated Segment Test 1. FAST算法原理 博客中已经介绍了很多图像特征检测算子,我们可以用LoG或者DoG检测图像中的Blobs(斑点检测) ...
- opencv笔记6:角点检测
time:2015年10月09日 星期五 23时11分58秒 # opencv笔记6:角点检测 update:从角点检测,学习图像的特征,这是后续图像跟踪.图像匹配的基础. 角点检测是什么鬼?前面一篇 ...
- Opencv学习笔记------Harris角点检测
image算法测试iteratoralgorithmfeatures 原创文章,转载请注明出处:http://blog.csdn.net/crzy_sparrow/article/details/73 ...
- Harris角点及Shi-Tomasi角点检测(转)
一.角点定义 有定义角点的几段话: 1.角点检测(Corner Detection)是计算机视觉系统中用来获得图像特征的一种方法,广泛应用于运动检测.图像匹配.视频跟踪.三维建模和目标识别等领域中.也 ...
- ORB(oriented FAST and rotated BRIEF)特征提取与检测
ORB采取FAST算法检测特征点,采取BRIEF算法计算特征点描述子. 1.检测特征点 检测候选特征点周围一圈的像素值,若有足够多的像素值与候选特征点的差异都较大,则认为该候选特征点是特征点. 对于上 ...
- 图像处理检测方法 — ORB(Oriented FAST and Rotated BRIEF)
1.FAST FAST算子的基本原理是:若某像素点与其周围领域内足够多的连续的像素点存在某一属性差异,并且该差异大于指定阈值,则可以断定该像素点与其邻域像素有可被识别的不同之处,可以作为一个特征点( ...
- 特征点检测算法——FAST角点
上面的算法如SIFT.SURF提取到的特征也是非常优秀(有较强的不变性),但是时间消耗依然很大,而在一个系统中,特征提取仅仅是一部分,还要进行诸如配准.提纯.融合等后续算法.这使得实时性不好,降系了统 ...
- ORB特征提取与匹配
ORB特征是目前最优秀的特征提取与匹配算法之一,下面具体讲解一下: 特征点的检测 图像的特征点可以简单的理解为图像中比较显著显著的点,如轮廓点,较暗区域中的亮点,较亮区域中的暗点等.ORB采用FAST ...
随机推荐
- valgrind和Kcachegrind性能分析工具详解
一.valgrind介绍 valgrind是运行在Linux上的一套基于仿真技术的程序调试和分析工具,用于构建动态分析工具的装备性框架.它包括一个工具集,每个工具执行某种类型的调试.分析或类似的任务, ...
- vue项目中如何引用tinymce
最近公司在做一个CMS系统的项目,其中富文本编辑框用的很多,目前流行的也很多,包括wangEditor.TinyMCE.百度ueditor.kindeditor.CKEditor等.经过自己的一番翻箱 ...
- 小心 Enum Parse 中的坑
小心 Enum Parse 中的坑 Intro 最近使用枚举的时候,踩了一个小坑,分享一下,主要是枚举从 int 值转成枚举时可能会遇到 Sample 来看下面的示例: 首先定义一个枚举: publi ...
- 校招有感:计算机专业毕业生如何找工作(Java方向)
这两年毕业生的就业形势,大家都看在眼里.由于我平时本职会到校园去做校招,兼职会做培训,所以也接触到了不少计算机应届毕业生. 我看到的计算机专业毕业生,各种情况的都有.虽然其中有学校的因素,但学校的因素 ...
- ST在keil下开发时候文件options配置的一些小技巧
作者:良知犹存 转载授权以及围观:欢迎添加微信公众号:Conscience_Remains 总述 这是之前ST芯片载keil下开发时候总结的一些代码文件options配置小笔记,虽然不是很复杂 ...
- 2019牛客暑期多校训练营(第八场)B-Beauty Values(期望线性性)
>传送门< 题意:思路:期望的线性性(可加性),比赛的时候写的代码超级无敌长,不过值得欣慰的是一发AC了,官方的题解写的还不错~ 我们可以把每种数字对答案的贡献分开来计算,即枚举每个数字, ...
- C语言实现--静态链表的操作
1,我们研究数据结构的操作,第一要弄懂它的结构体表示(也就是结构体特点).第二要清楚它的初始化和撤销过程.对于静态链表首先分析它的特点:一是采用静态存储方式,二是没有指针.静态链表就是不用指针来表示链 ...
- 【poj 2891】Strange Way to Express Integers(数论--拓展欧几里德 求解同余方程组 模版题)
题意:Elina看一本刘汝佳的书(O_O*),里面介绍了一种奇怪的方法表示一个非负整数 m .也就是有 k 对 ( ai , ri ) 可以这样表示--m%ai=ri.问 m 的最小值. 解法:拓展欧 ...
- 牛客编程巅峰赛S2第10场 - 钻石&王者 C.牛牛的路径和 (位运算,dfs)
题意:给你节点数为\(n\)的树,每个节点都有自己的权值,求所有路径的上的点的权值按位与的和. 题解:题目给的数据很大,我们不能直接去找.因此我们可以枚举二进制\([1,20]\)的每一位,然后再枚举 ...
- Codeforces Round #575 (Div. 3) B. Odd Sum Segments 、C Robot Breakout
传送门 B题题意: 给你n个数,让你把这n个数分成k个段(不能随意调动元素位置).你需要保证这k个段里面所有元素加起来的和是一个奇数.问可不可以这样划分成功.如果可以打印YES,之后打印出来是从哪里开 ...