ORB-SLAM2初步
一、ORB-SLAM简介
最近开始入坑SLAM,经过简单调研,各位大咖认为,目前最优秀的视觉SLAM系统是ORB-SLAM2,因此对ORB-SLAM2进行了学习。
ORB-SLAM2是2015年提出的支持单目、双目、RGB-D相机三种工作模式的SLAM系统。整个系统基于ORB特征实现,包含了跟踪定位、局部地图构建、回环检测三个主线程。通常认为ORB-SLAM是基于PTAM的而进一步发展的,包含了目前流行SLAM系统的主要模块。整个系统在PC端运行帧率可达30帧,由于使用了自动初始化、重定位、回环检测等,具备较好的鲁棒性和准确性。官网网址为:http://webdiis.unizar.es/~raulmur/orbslam/。
二、ORB-SLAM三线程分析
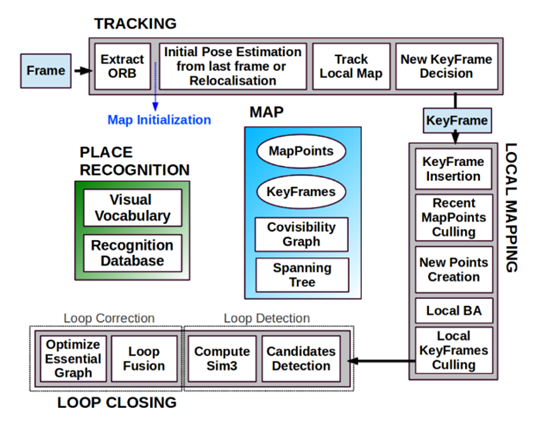
如上图所示,三线程为Tracking、LocalMapping、LoopClosing。
(1)跟踪模块:主要是通过提取每一帧的ORB特征,通过恒速模型、关键帧模型、重定位估计相机初始位姿,然后通过共视关系跟踪局部局部地图来优化相机位姿进行优化,最后确定当前帧是否作为关键帧插入地图中。
(2)局部建图:主要是针对跟踪过程中产生的关键帧进行操作,包括把该关键帧插入到地图中,添加新的地图点,剔除冗余的关键帧、地图点,通过Local BA优化相机位姿和地图点。
(3)回环检测:同样针对关键帧进行操作,主要是通过BoW模型判断当前关键帧是否产生回环,如果产生可能的回环则进行回环一致性检测,通过一致性检测之后认为运动已经产生回环,则计算Sim3变换进行回环矫正,并另起线程进行全局优化。
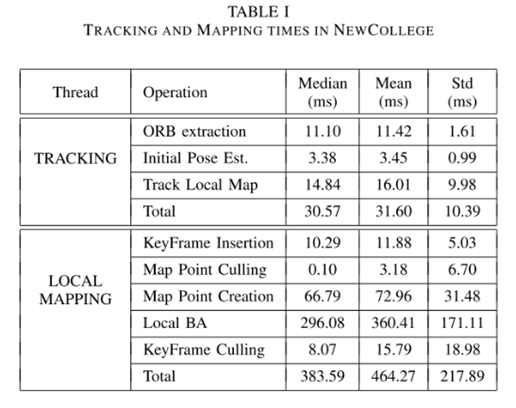
其中跟踪模块需要处理摄像头获取的每一帧图像,从而实时估计相机位姿,而局部建图和回环检测通常只针对关键帧进行操作,因此不需要实时运行。下面贴了作者测试的时间分布情况:
学习ORB-SLAM2过程中参考了很多大咖的博客(都是可以百度出来的):
http://blog.csdn.net/u010128736/article/details/53157605
http://www.cnblogs.com/gaoxiang12/p/5161223.html
。。。。
安装配置的过程网上的教程已经很多了,这里就不在赘述了。上面这些都是网上现成的,后面将给出自己学习过程中理解的具体细节。
ORB-SLAM2初步的更多相关文章
- orb slam2 双目摄像头
主要参考了http://blog.csdn.net/awww797877/article/details/51171099这篇文章,其中需要添加的是:export ROS_PACKAGE_PATH=$ ...
- ORB SLAM2在Ubuntu 16.04上的运行配置
http://www.mamicode.com/info-detail-1773781.html 安装依赖 安装OpenGL 1. 安装opengl Library$sudo apt-get inst ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- ORB SLAM2 学习笔记
cd ~/Documents/demos/ORB_SLAM2 ./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM1.y ...
- Ubuntu14.04 使用本地摄像头跑ORB SLAM2(暂未完成)
嗯 这个方法我暂时弄不出来,用了另外一个方法:SLAM14讲 第一次课 使用摄像头或视频运行 ORB-SLAM2 前面的准备: Ubuntu14.04安装 ROS 安装步骤和问题总结 Ubuntu14 ...
- orb slam2
- 使用 evo 工具评测 VI ORB SLAM2 在 EuRoC 上的结果
http://www.liuxiao.org/2017/11/%E4%BD%BF%E7%94%A8-evo-%E5%B7%A5%E5%85%B7%E8%AF%84%E6%B5%8B-vi-orb-sl ...
- Ubuntu16.04+Ros+Usb_Cam ORB SLAM2
转载自:https://www.jianshu.com/p/dbf39b9e4617亲测可用 1.其中编译ORB_SLAM2的 ./build.sh 和 ./build_ros.sh之前需要修改文 ...
- 最近一年语义SLAM有哪些代表性工作?
点击"计算机视觉life"关注,置顶更快接收消息! 本文由作者刘骁授权发布,转载请联系原作者,个人主页http://www.liuxiao.org 目前 Semantic SLAM ...
- SLAM学习笔记 - ORB_SLAM2源码运行及分析
参考资料: DBow2的理解 单目跑TUM数据集的运行和函数调用过程 跑数据集不需要ros和相机标定,进入ORB_SLAM目录,执行以下命令: ./Examples/Monocluar/mono_tu ...
随机推荐
- vue+elementui+netcore混合开发
1.VueController.cs using Bogus; using System; using System.Collections.Generic; using System.Linq; u ...
- 物联网架构成长之路(39)-Bladex开发框架环境搭建
0.前言 上一篇博客已经介绍了,阶段性小结.目前第一版的物联网平台已经趋于完成.框架基本不变了,剩下就是调整一些UI,还有配合硬件和市场那边,看看怎么推广这个平台.能不能挣点外快.第一版系统虽然简陋, ...
- Vue devtool插件安装后无法使用,提示“vue.js not detected”的解决方法
vue devtool下载 极简插件 github vue devtool安装 点击谷歌浏览器箭头所指图标-更多工具-扩展程序 ①:直接将后缀为crx的安装包拖进下图区域即可自动安装 ② ...
- tensorboard--打开训练的日志文件
tensorboard --logdir=logs 注意:等号之间不要空格.
- SQL Server 通过“with as”方法查询树型结构
一.with as 公用表表达式 类似VIEW,但是不并没有创建对象,WITH AS 公用表表达式不创建对象,只能被后随的SELECT语句,其作用: 1. 实现递归查询(树形结构) 2. 可以在一个 ...
- linux 链接mysql并覆盖数据
--链接mysql 命令格式: mysql -h 主机地址 -u 用户名 -p --按回车输入密码 --在服务器里登录到数据库里 ,使用某个库,gtmc 代表数据库名称 use gtmc --覆盖数据 ...
- .NET Core 2.1 以下的控制台应用程序生成 EXE,且使用命令行参数动态运行控制器应用程序的示例
文章: https://stackoverflow.com/questions/44038847/vs2017-compile-netcoreapp-as-exe 引用 <ItemGroup&g ...
- GO学习笔记 - 模版渲染及多种输出
本文主题:基于内置的text/template实现Golang模版渲染,并将结果写入文件.屏幕.变量. 小慢哥的原创文章,欢迎转载 目录 ▪ 定义结构体 ▪ 定义模版文本 ▪ 模版渲染及输出方式 ▪ ...
- WPF ListView ,XML
<?xml version="1.0" encoding="utf-8" ?><PersonList> <Person Id=&q ...
- EF导航属性会自动从已查出来的对象附加
如果新增对象导航属性对应的Id有值,其相应的导航属性会自动在内存中查找,如果存在会自动附加上去. public virtual void UpdateMaterialPurchaseOrderItem ...