自动驾驶 | 为CarLA添加一辆小米SU7 Part I
自动驾驶 | 为CarLA添加一辆小米SU7 Part I

导言
什么是CarLA?
CarLA是一款基于虚幻引擎4(Unreal Engine 4)构建的开源自动驾驶仿真平台,为自动驾驶算法的研发、测试与验证提供高保真的虚拟环境。其核心特性包括:
- 高精度地图与传感器模拟:支持激光雷达、摄像头、毫米波雷达等多种传感器的物理级仿真。
- 动态交通场景:内置行人、车辆、交通信号等交互元素,可模拟复杂城市路况。
- 模块化设计:用户可通过Python或C++ API灵活控制环境参数、交通流及智能体行为。
通过从源码构建CarLA,我们可以通过UE4编辑器快速便捷地为它添加一款载具。
准备工作
为了将自定义的一款载具添加到CarLA中,你需要做好如下准备工作:
- 已经准备好的载具模型
- 一份从源码构建的CarLA和UE4编辑器(详见https://carla.readthedocs.io/en/latest/build_windows/#windows-build)
- 安装好CarLA API的Python环境
- 最新版本的Blender
在本文中,我将以小米 SU7为例,将这款载具添加到CarLA中,你可以在Sketchfab中下载到所需要的资源:https://sketchfab.com/3d-models/xiaomi-su7-ca2cda599f5341068c992c9f44551bf9
准备要导入的载具
模型准备
首先将你所需要的模型下载到本地并解压,在这里我选择了gltf格式
打开blender,选择file -> import -> gltf即可导入:
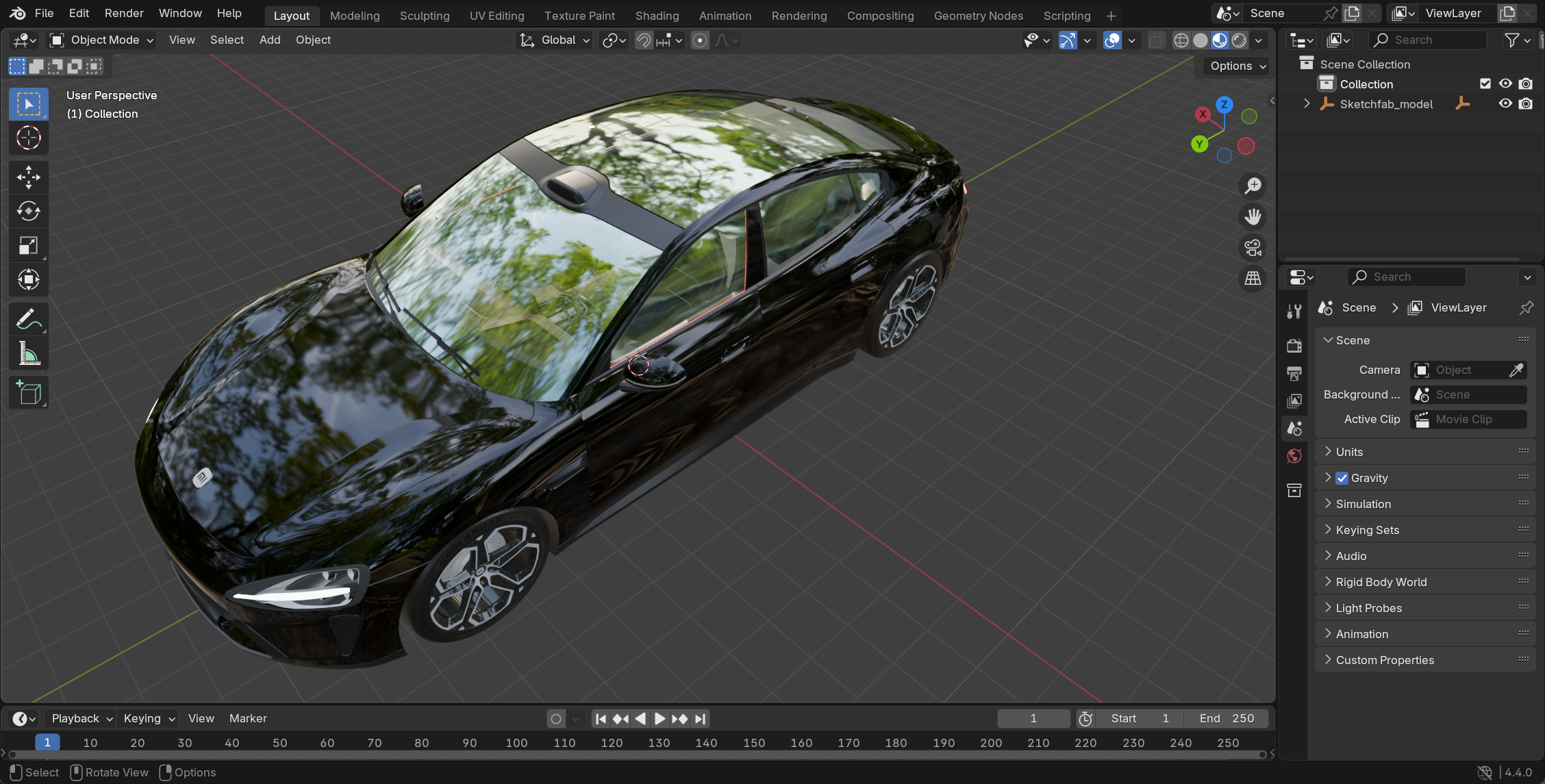
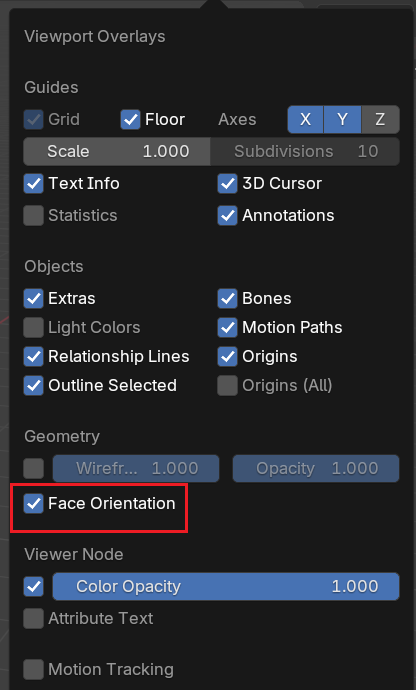
接下来我们开始检查并整理模型,打开face orientation,检查所有面的内外朝向都没问题(确保没有面的外侧是红色的)
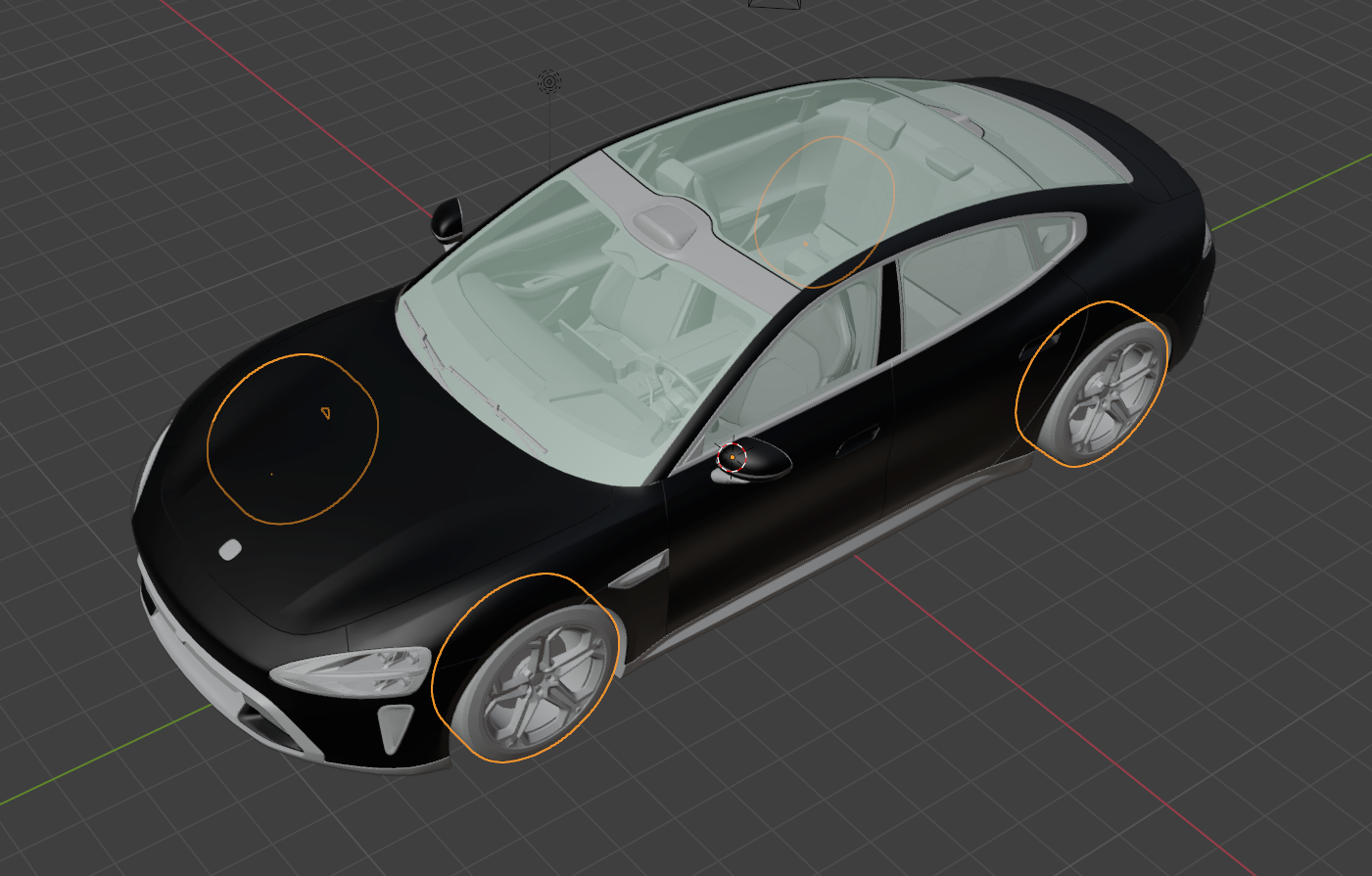
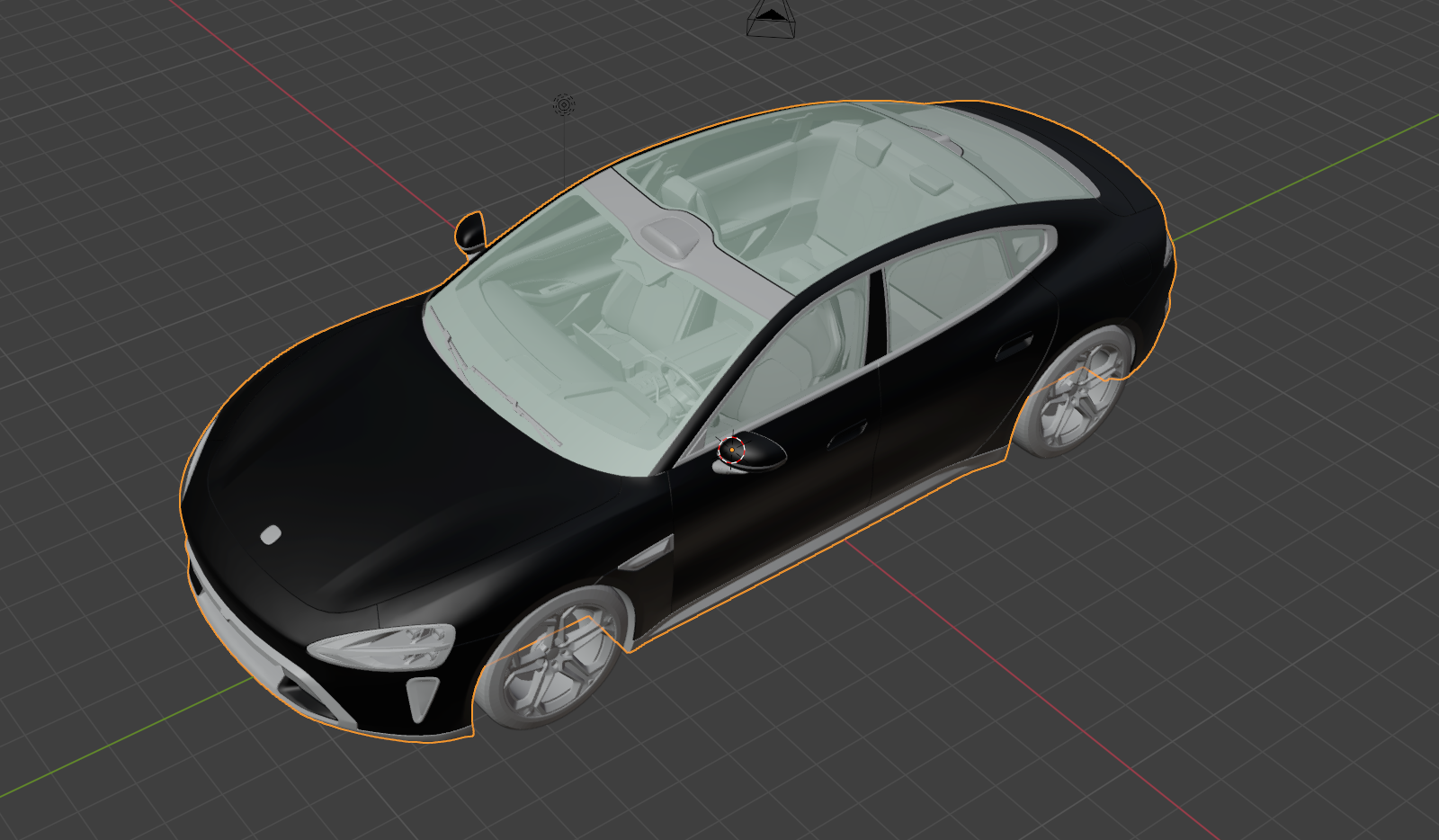
为了方便后续骨骼绑定,我强烈建议将模型划分为四个轮子和车身两个部分:
接下来,我们将模型缩放到以米为单位,并且以x轴为正前方,z轴朝上,并且车轮是刚好接地的:

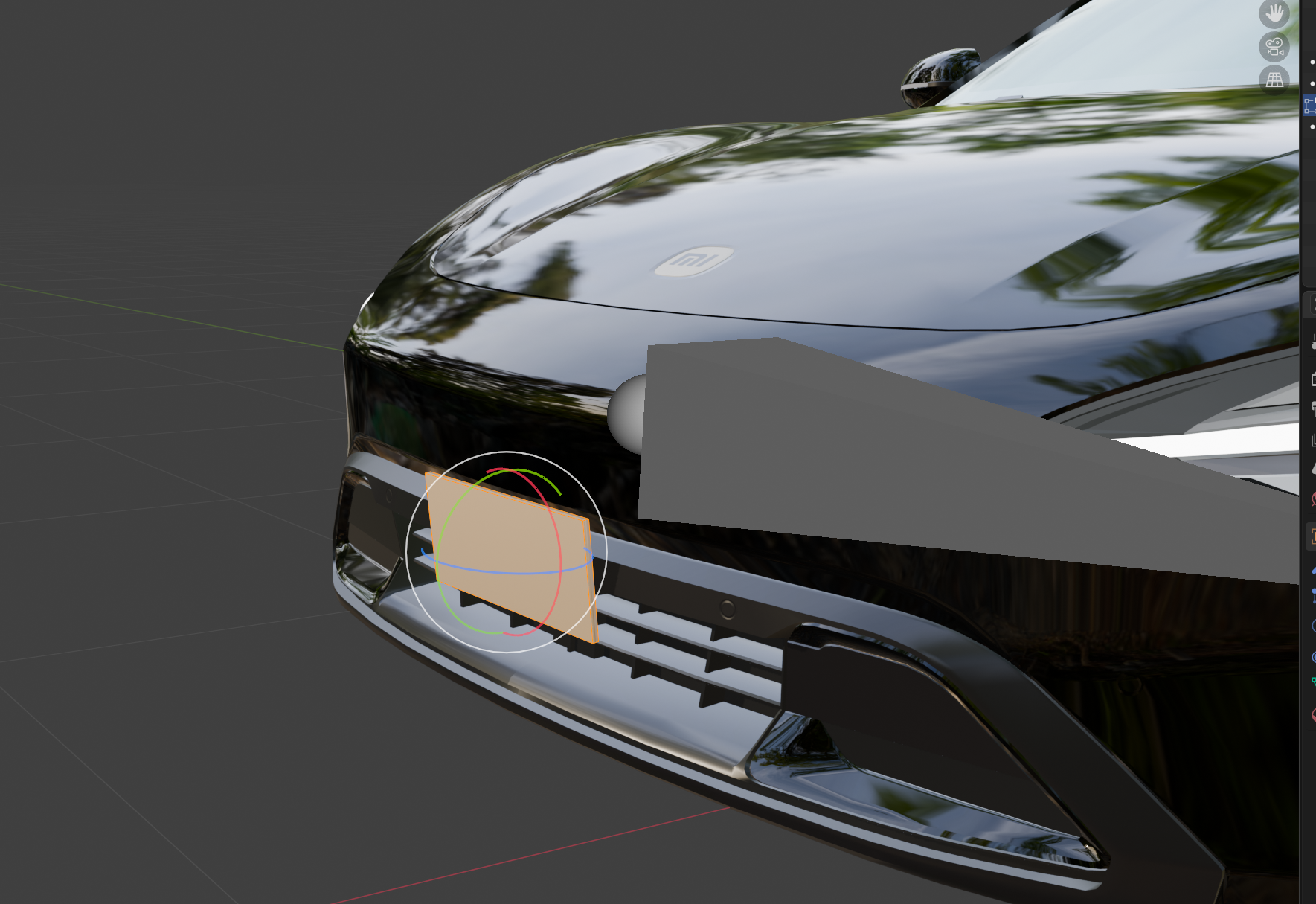
(Optional)如果你希望给载具更多细节,可以从官方下载车牌并置于车头和车尾(https://carla-assets.s3.us-east-005.backblazeb2.com/fbx/LicensePlate.rar)
骨架对齐
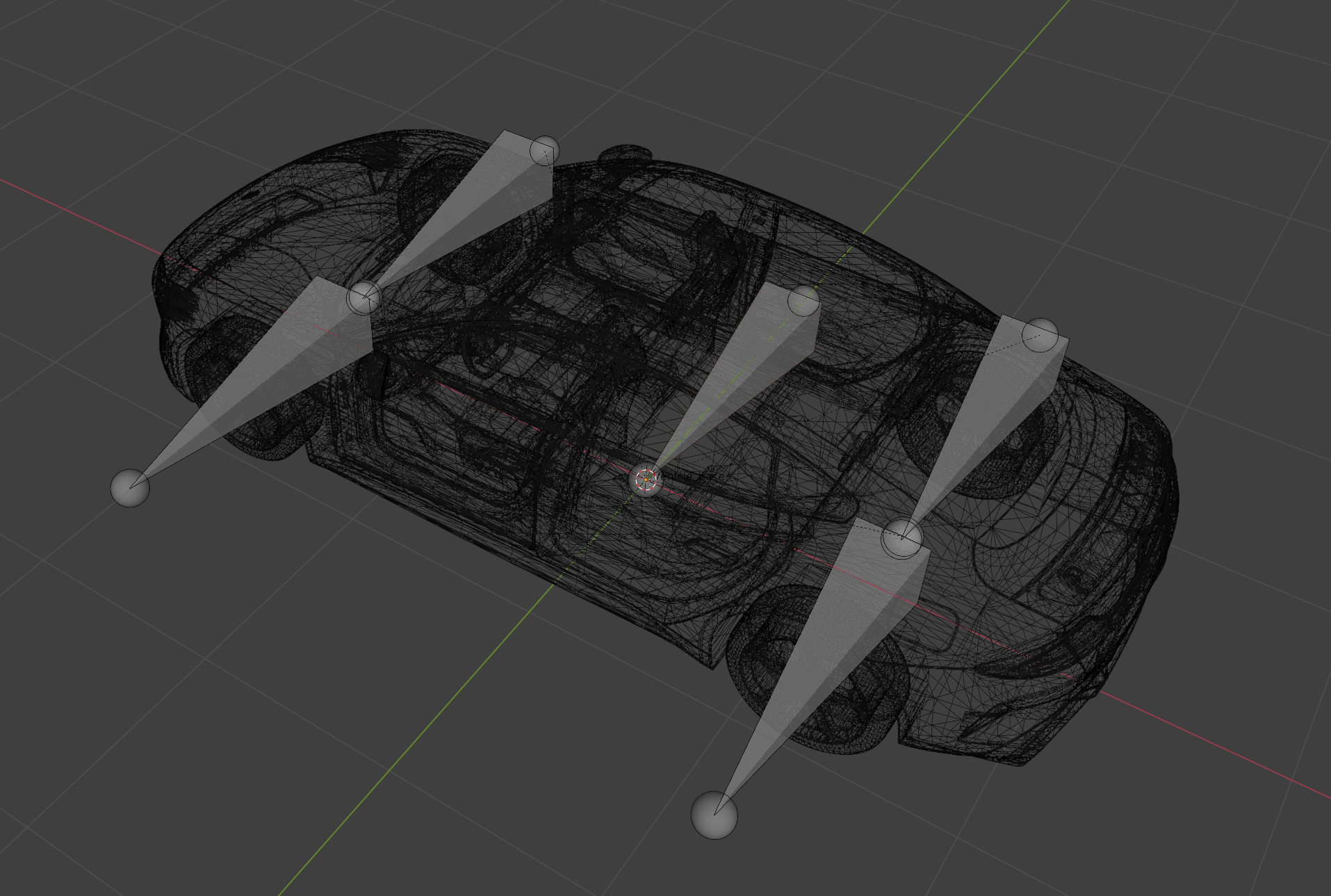
接下来,我们从官网下载所需要的载具骨架(https://carla-assets.s3.us-east-005.backblazeb2.com/fbx/VehicleSkeleton.rar),选择file -> import -> fbx导入到blender中
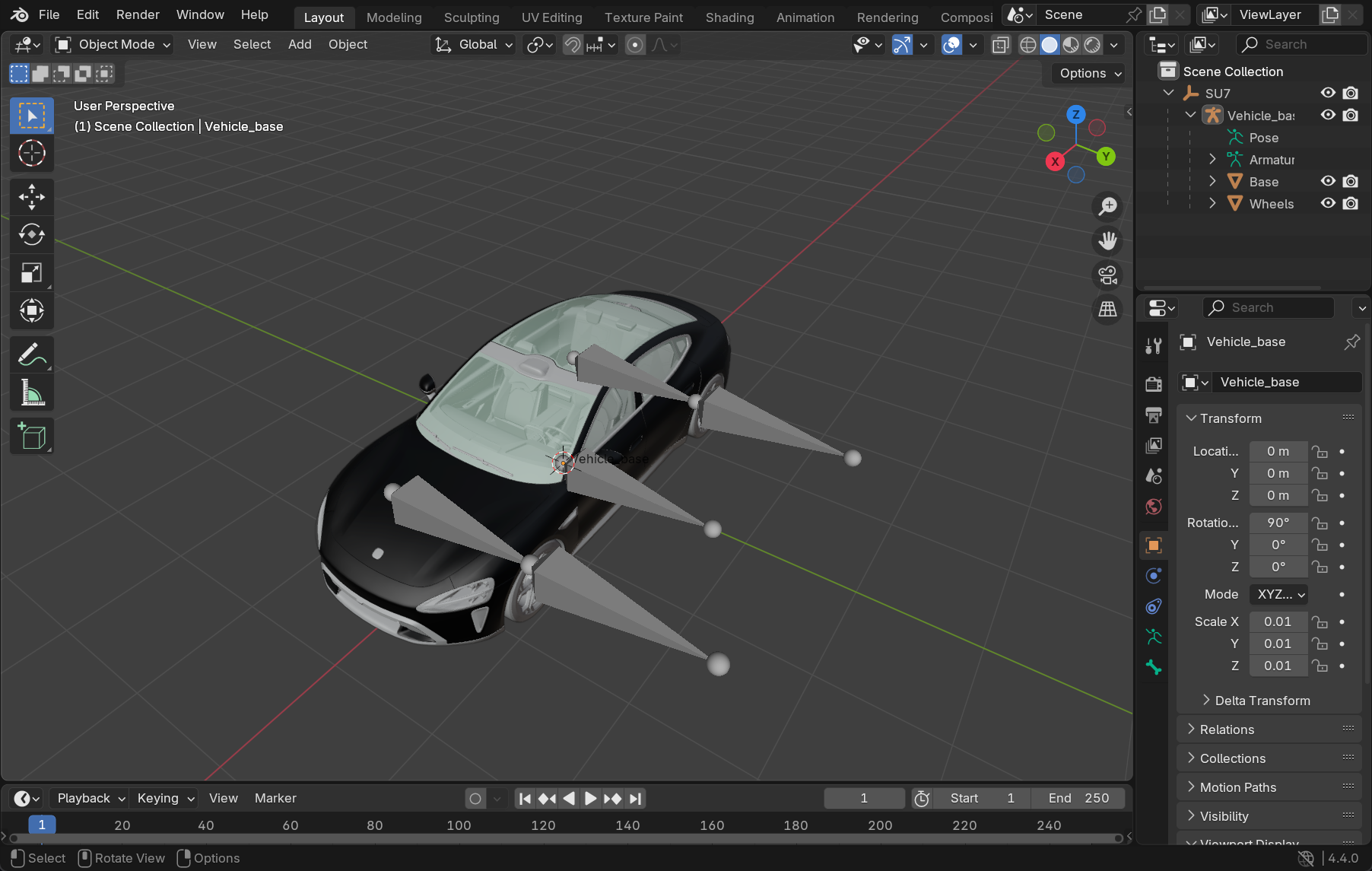
五个骨骼为:Vehicle_Base,Wheel_Front_Left,Wheel_Front_Right,Wheel_Rear_Left以及Wheel_Rear_Right,分别对应车身,左前轮,右前轮,左后轮以及右后轮。
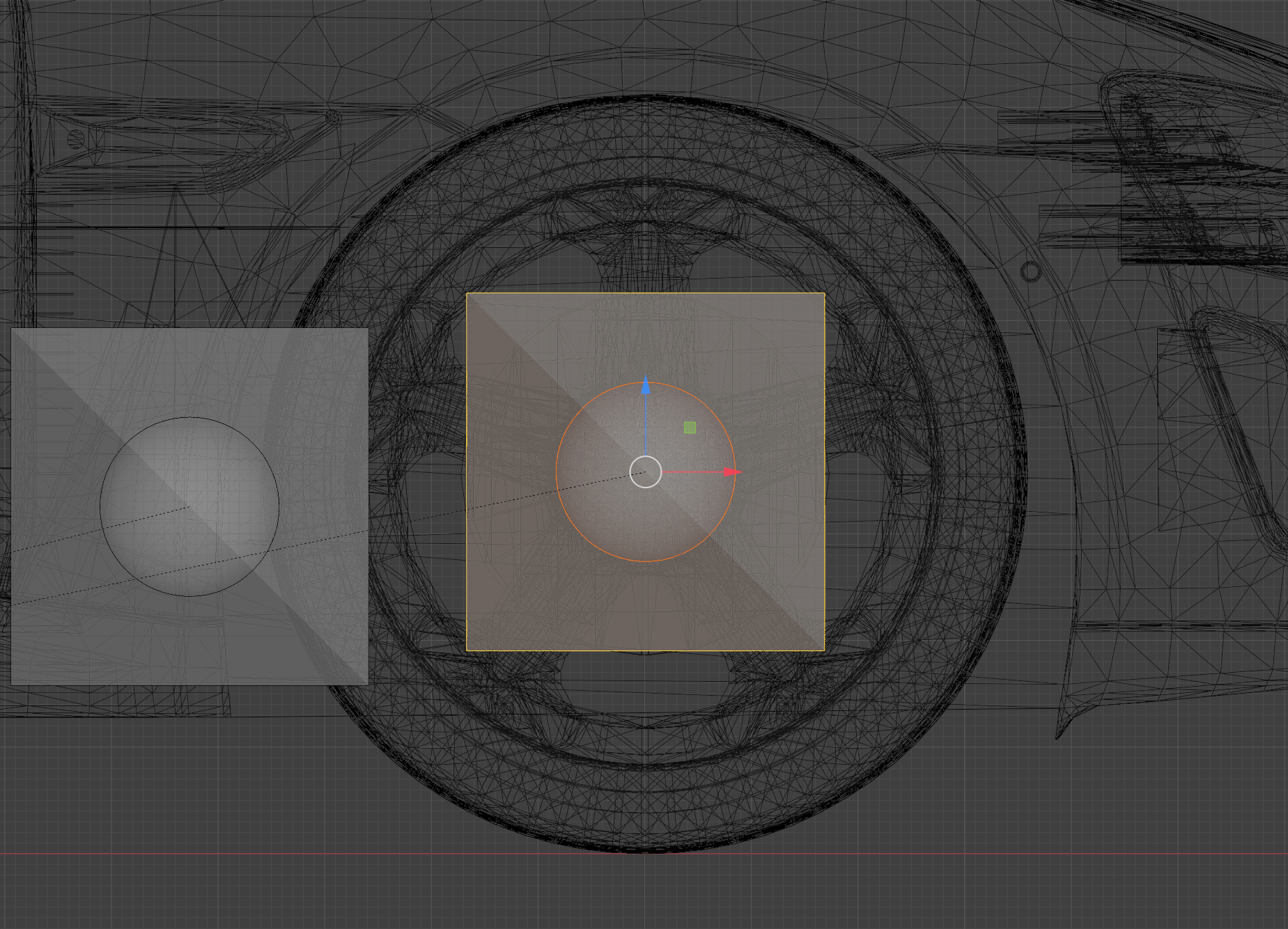
小心地将四个轮子的骨骼尾部对齐到车轮的中心
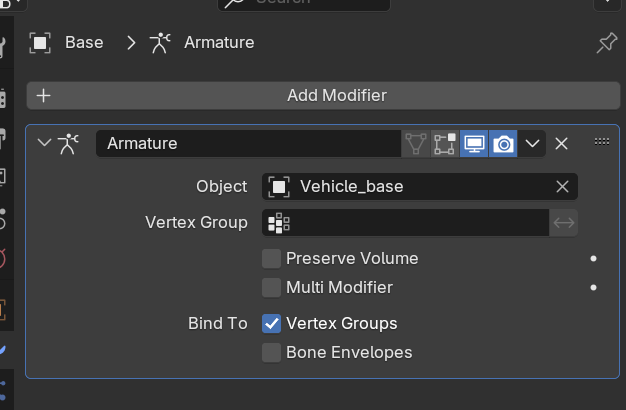
接下来为Base和Wheels各添加一个Modifier -> Deform -> Armature,object选择我们的骨架
顶点组绑定
接下来为每个轮子绑定到和四个骨骼同名的顶点组上:
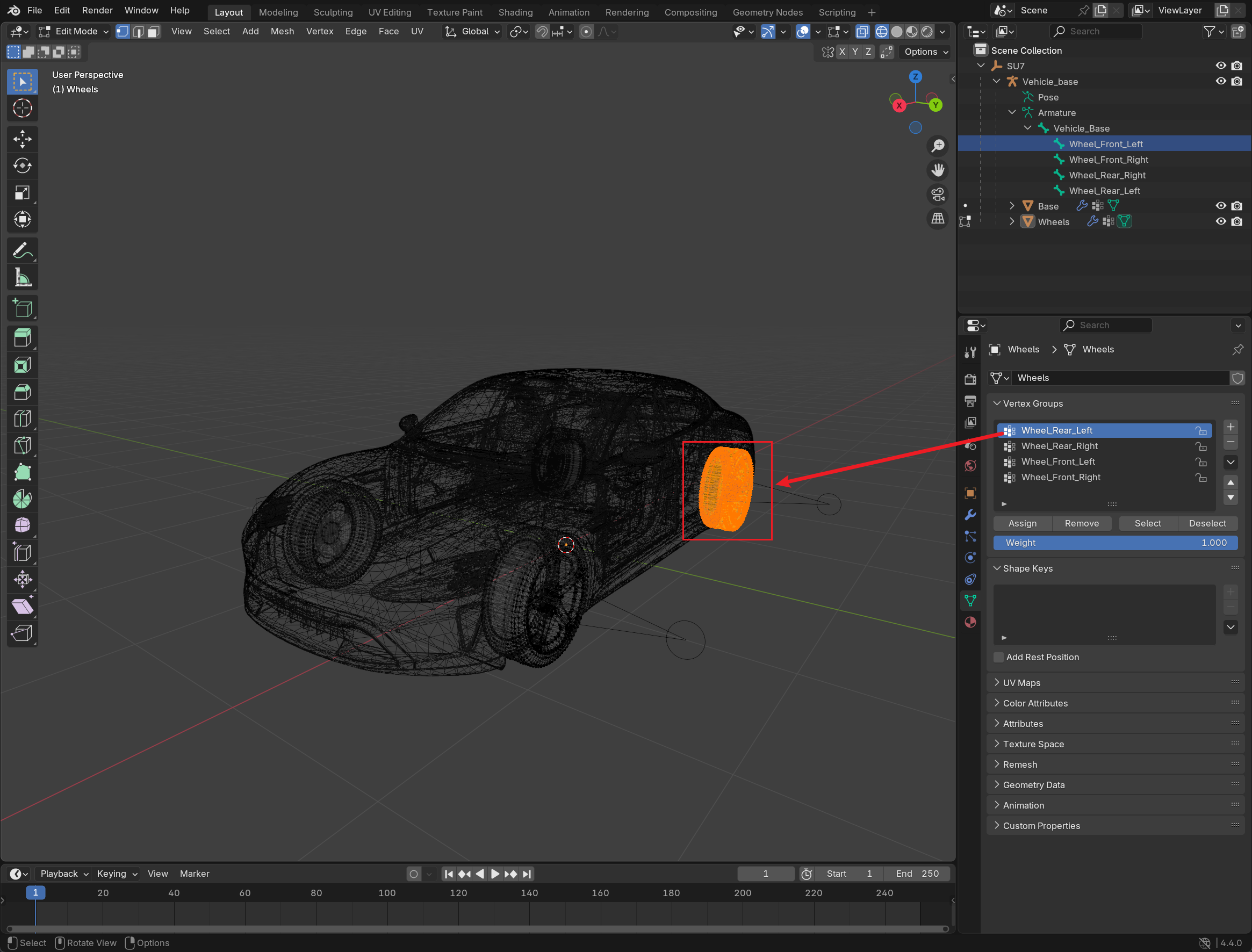
车身绑定为Vehicle_Base:
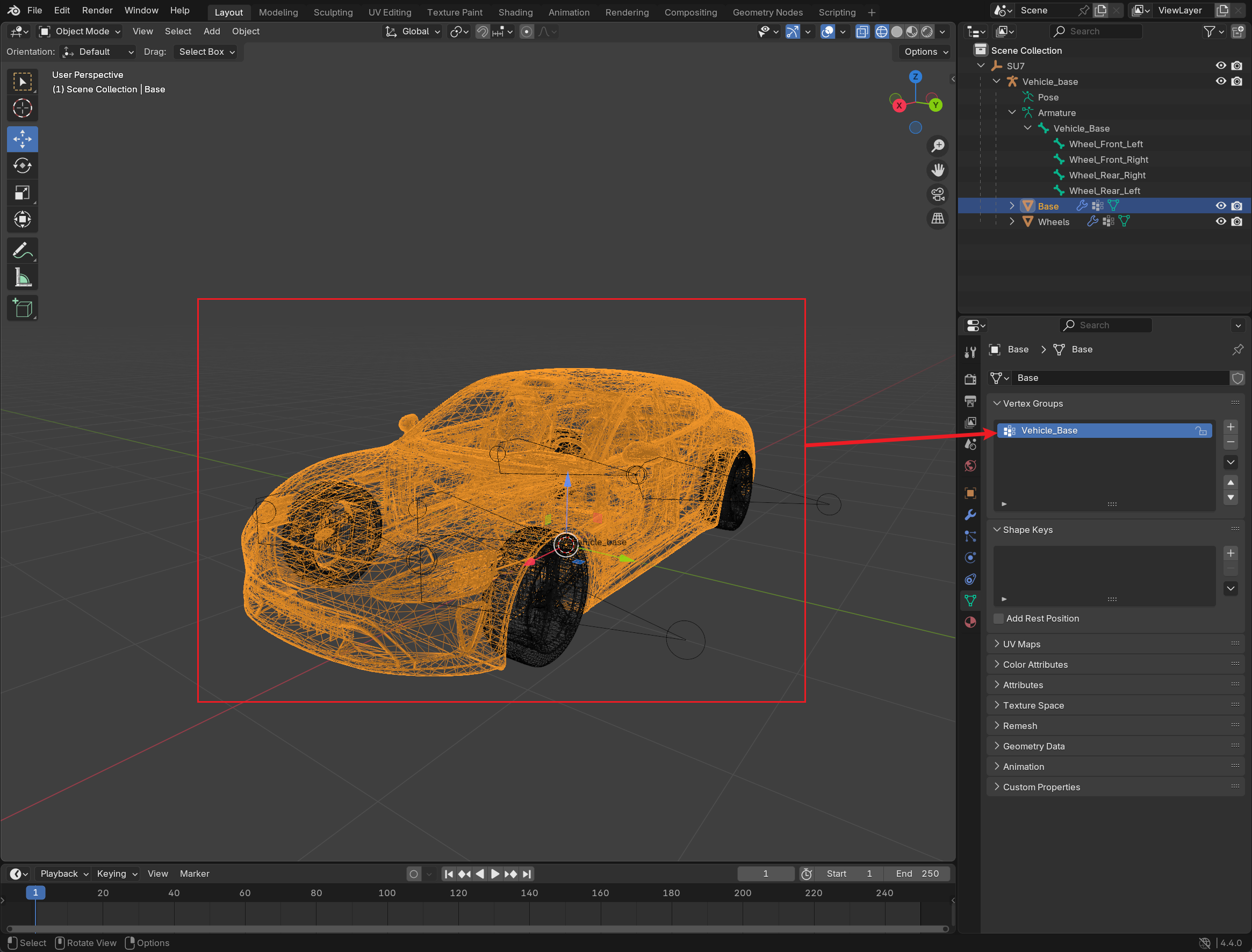
做完这些工作之后,理论上你就已经完成了骨骼绑定,你可以通过在Pose Mode下进行摆布验证骨骼是否都被正确绑定了
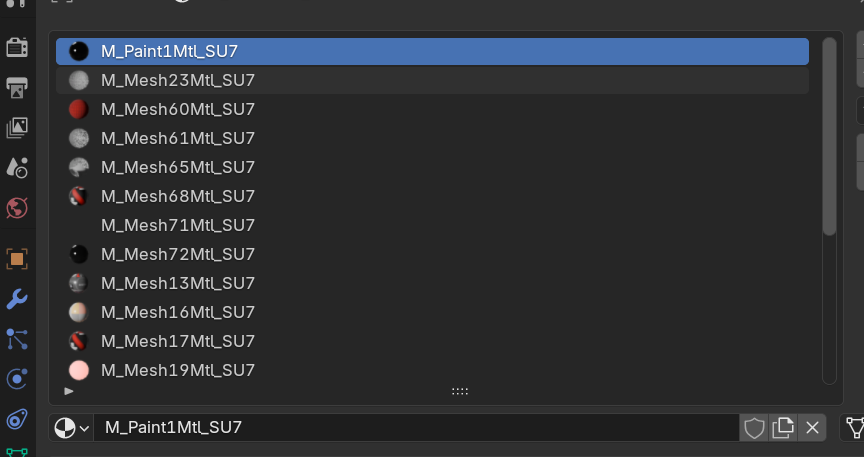
材质命名
在导出之前,强烈建议按照CarLA的材质命名标准(M_CarPart_CarName)进行重新命名:
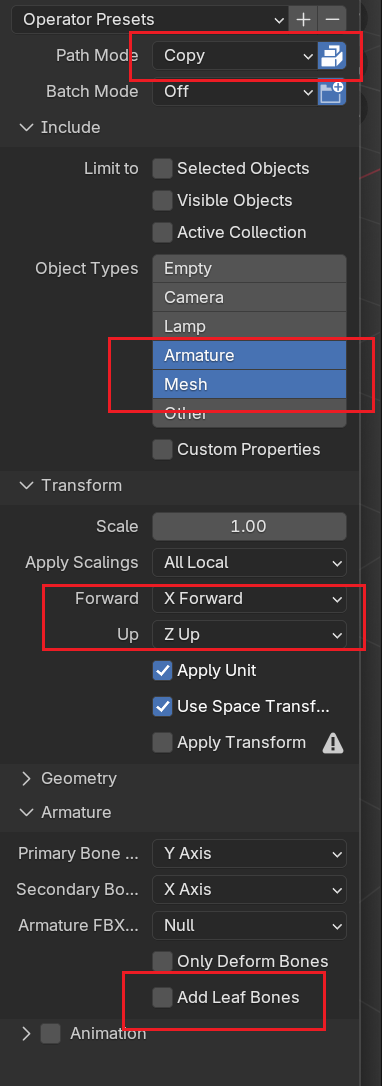
导出模型
上述工作都就绪之后,我们可以导出模型,选择file -> export -> fbx,按照图中的设置导出模型
导入UE4 Editor
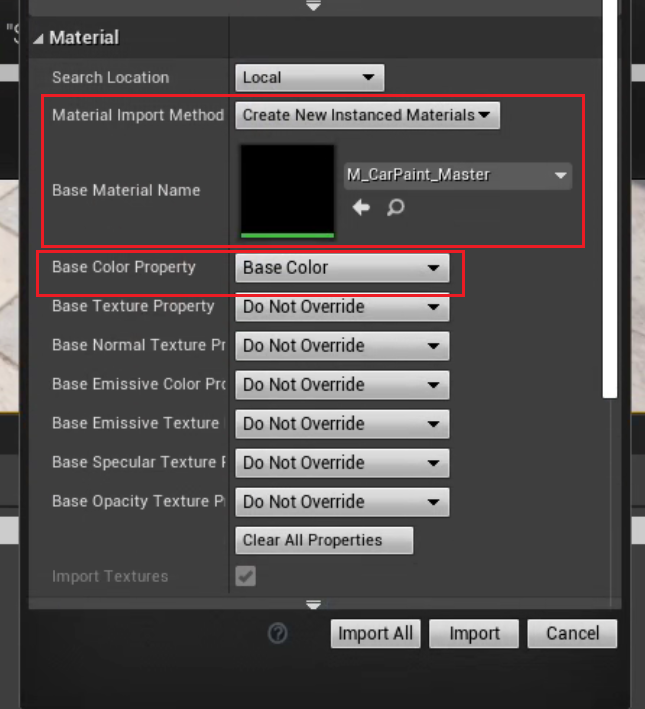
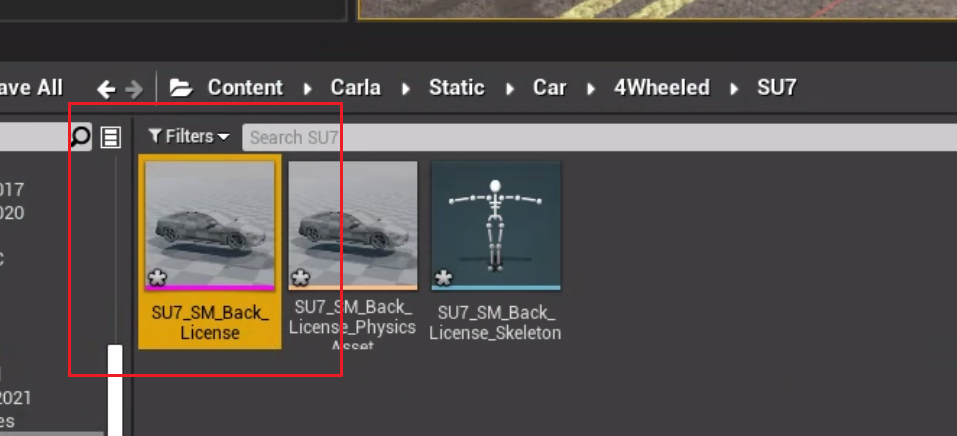
首先打开UE4 Editor,进入Content->Carla->Static->Car->4Wheeled下新建一个文件夹命名为我们的载具,并将我们导出的fbx进行导入,在导入的时候选择材质继承M_CarPaint_Master,并重载Base Color(不要吐槽画质为什么突然变低了,因为我的UE4是编译在远程的工作机上的)
导入完成之后,我们打开骨骼模型
但是看着好像和我们在blender看到的模型不太一样

不用担心,接下来我们把车灯和车窗换成已经有的透明材质(我这里为了偷懒,直接使用了特斯拉现成的车灯材质,大家不要学我,为了美观我还把车漆调成了小米SU7的经典配色)

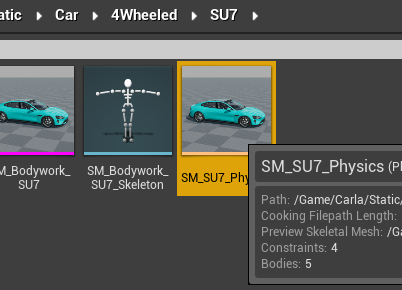
创建物理资产
如图打开物理资产
如图选择四个轮子,选择sphere后重新生成碰撞体
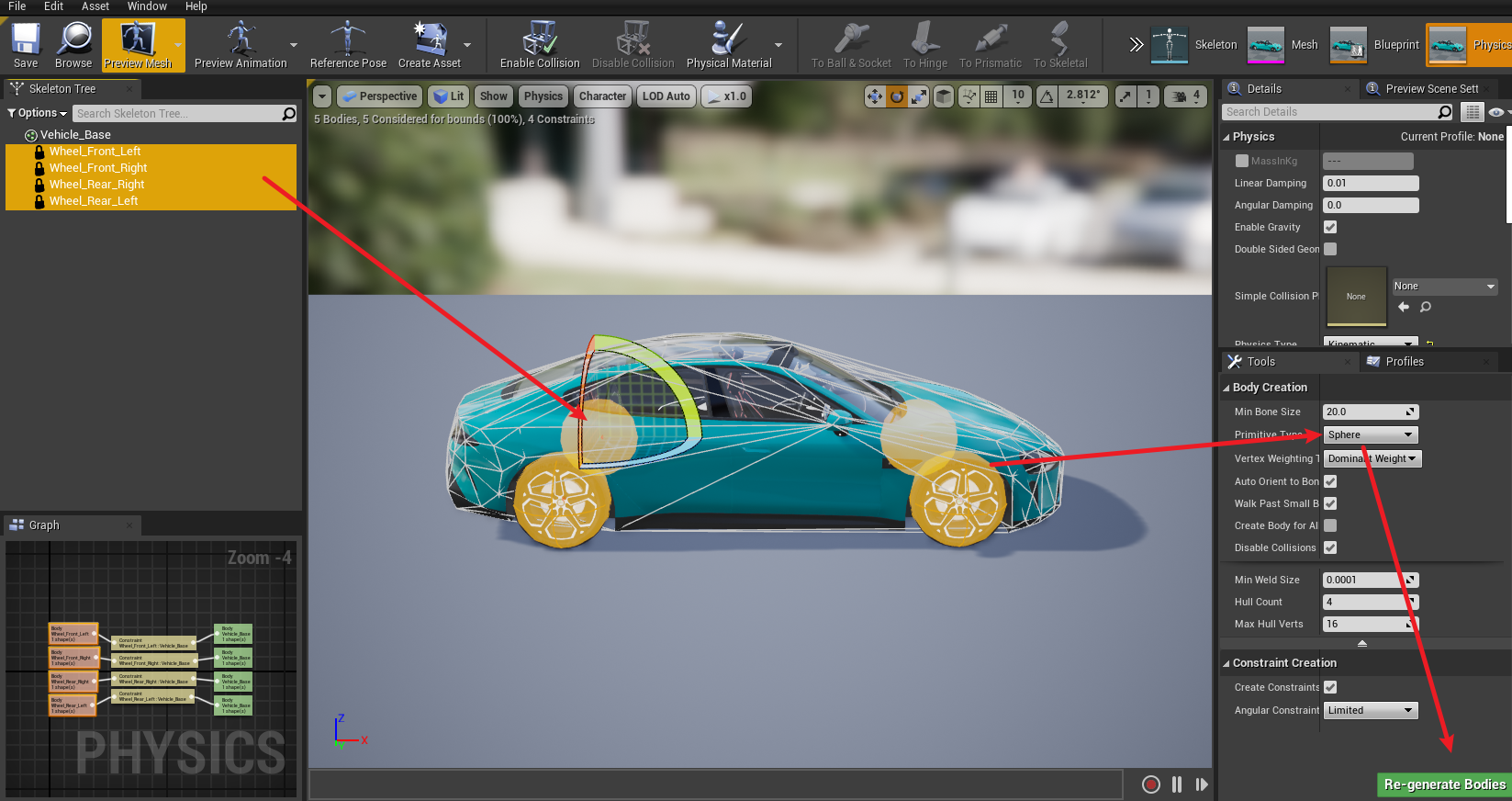
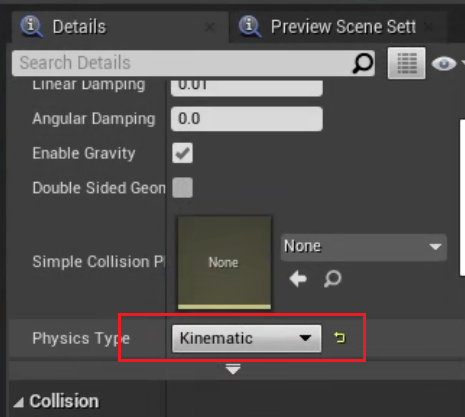
再把物理类型调成Kinematic
同理vehicle_base选择为Single Convex Hull之后再重新生成(这样的碰撞基本够用,如果你还需要更精细的类型就需要自行创建模型),物理类型是Default

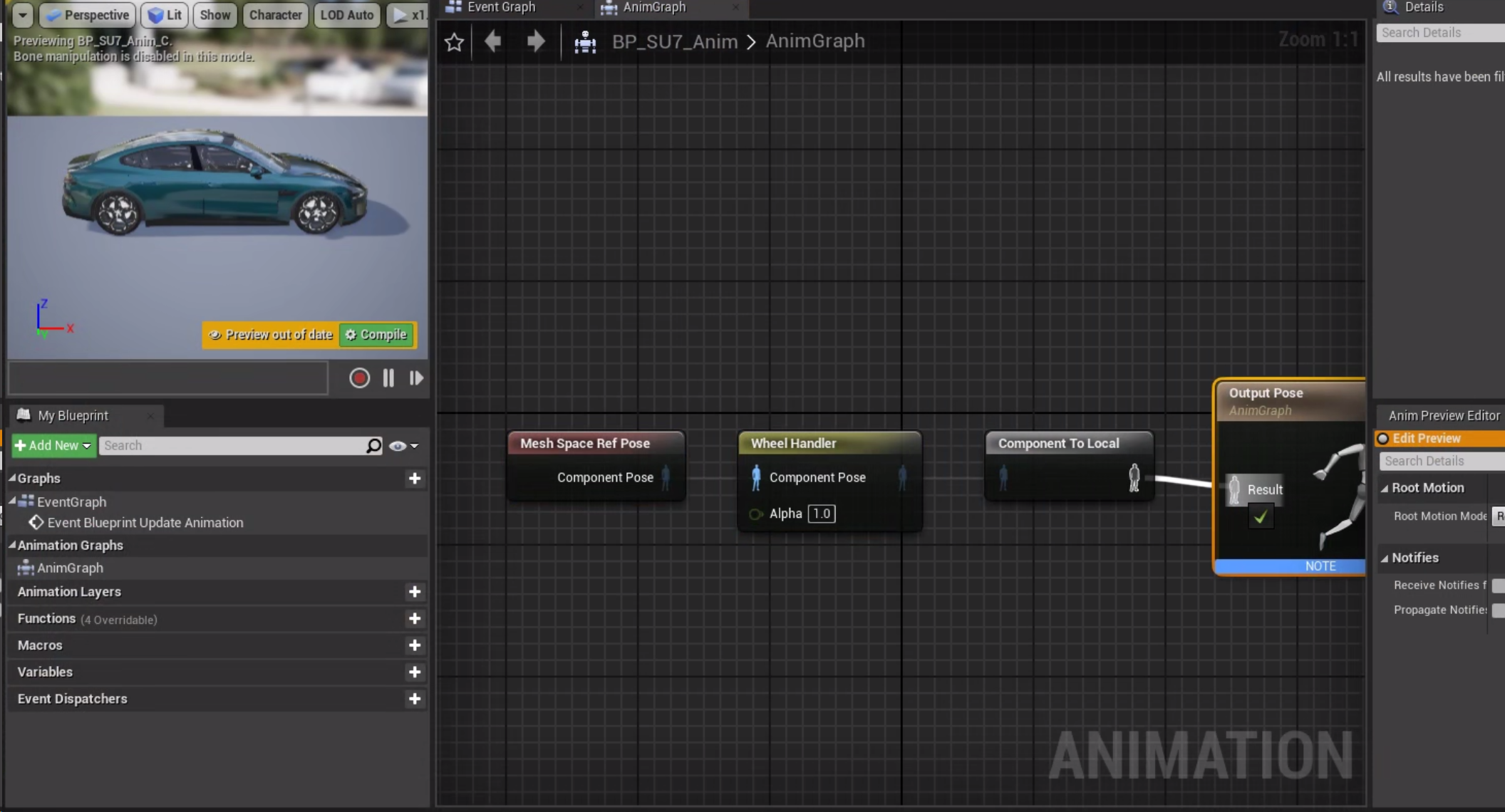
创建动画
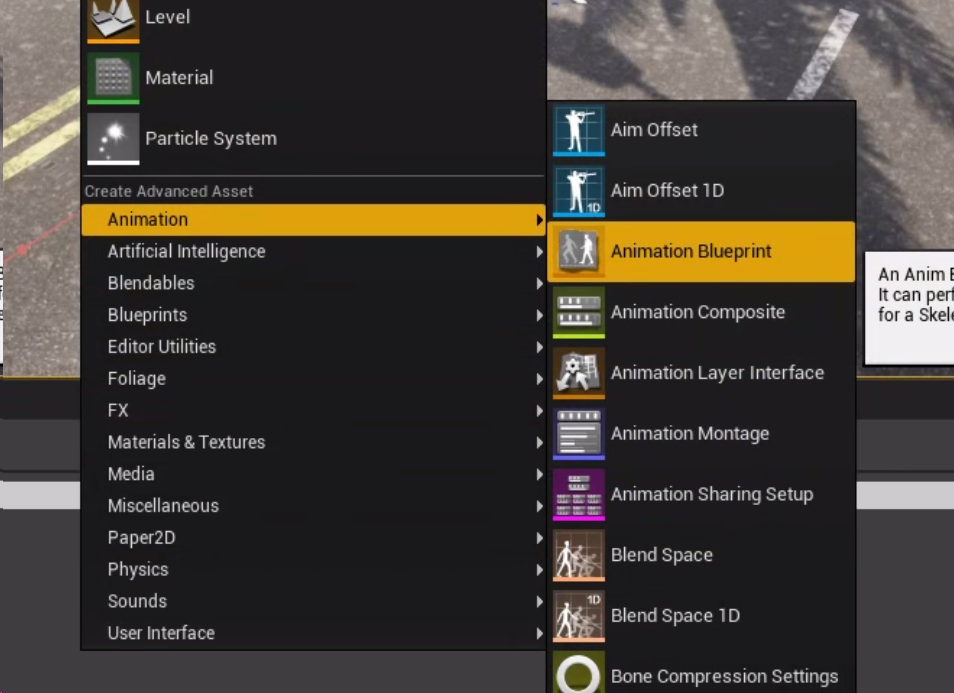
首先右键新建一个动画蓝图
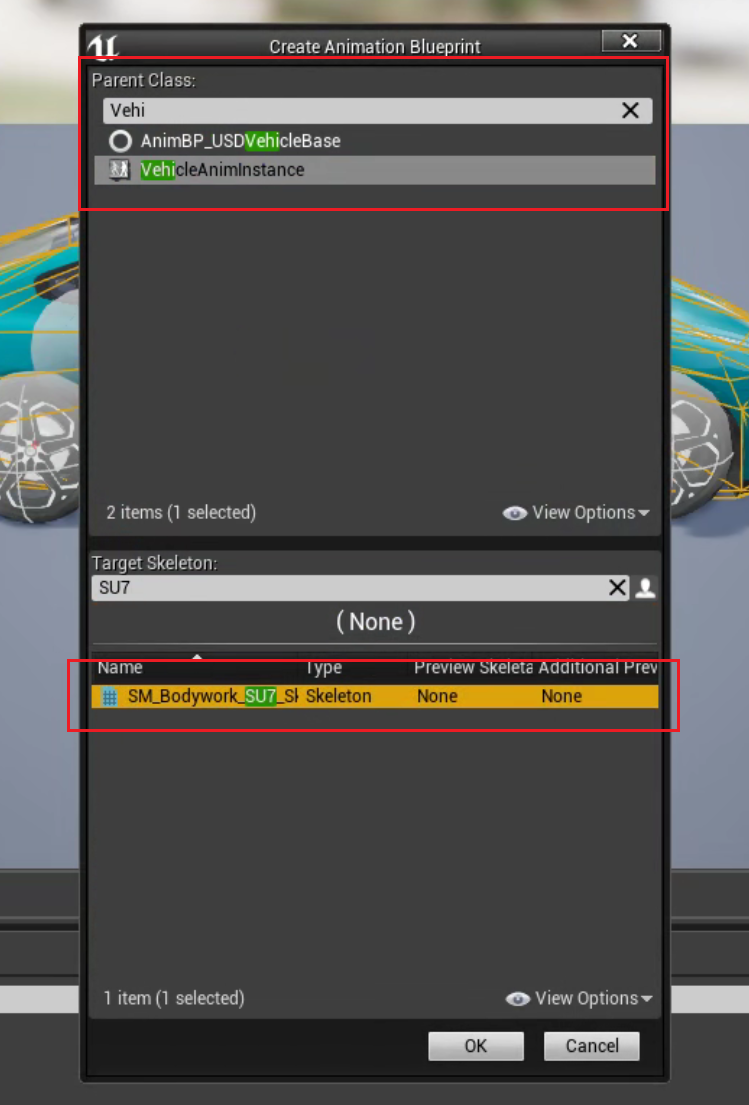
父类选择VehicleAnimIsntance,骨骼选择我们已经有的骨骼
接下来,我们找到Content->Carla->Static->Car->4Wheeled->Tesla->Tesla_Animation并打开,复制蓝图中的所有节点
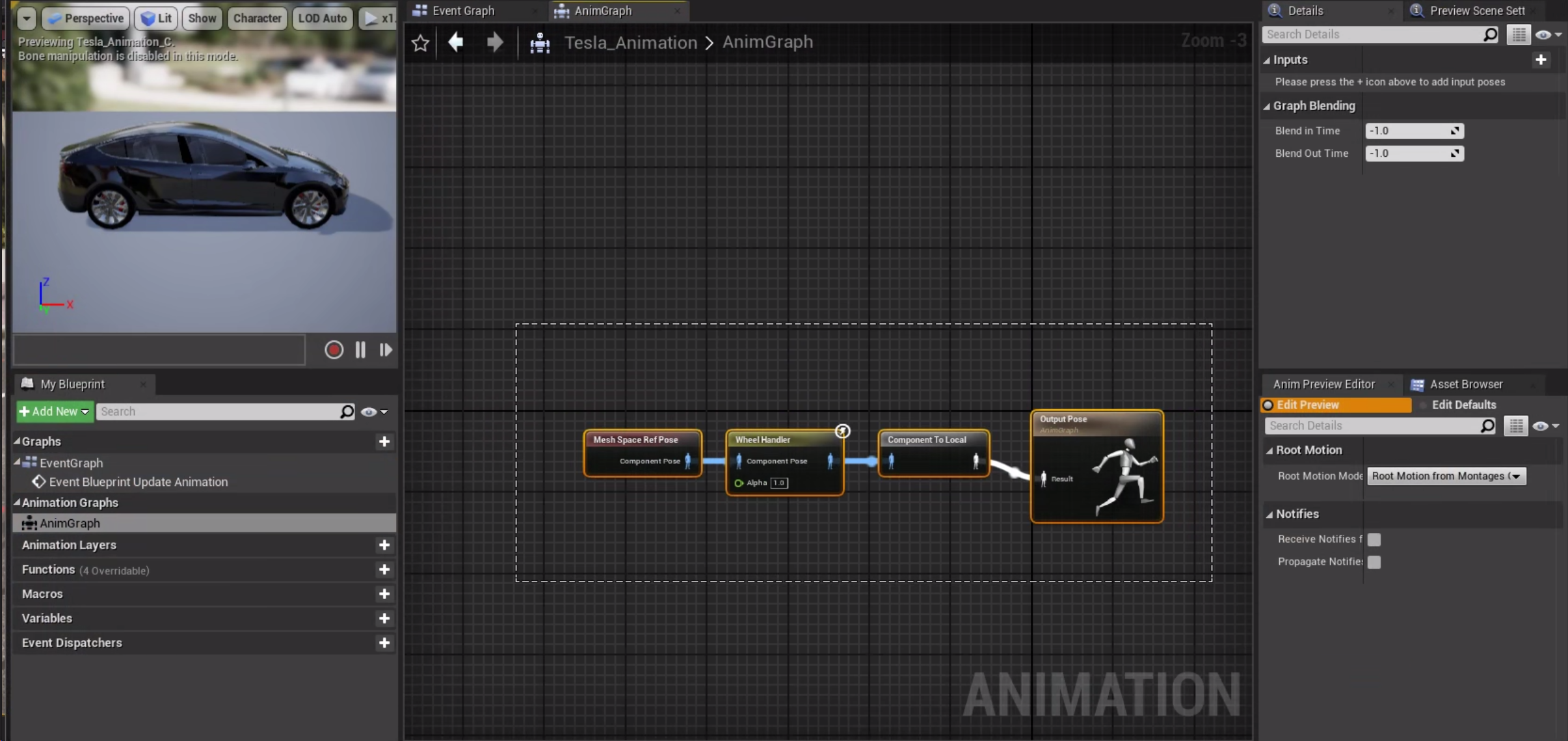
再见这些节点粘贴到我们刚才新建的动画蓝图中,完成连线并点击左上角的编译,保存并退出
配置载具蓝图
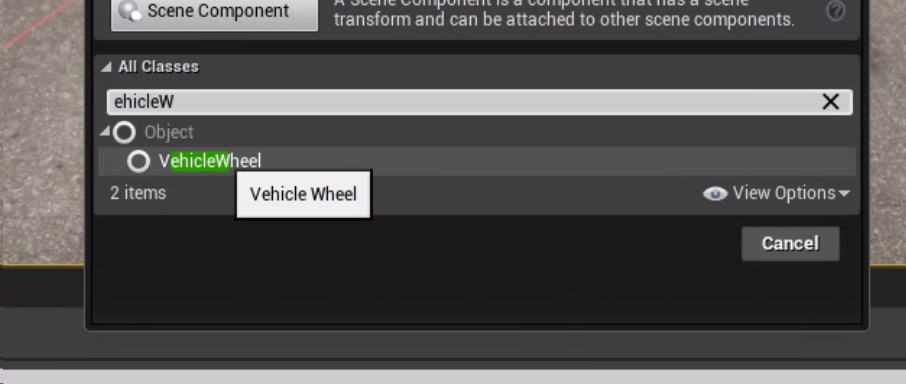
打开Content->Carla-Blueprints->Vehicles,创建一个新的文件夹并命名为我们的载具
右键选择新建蓝图,选择VehicleWheel,分别为BP_SU7_FrontWheel和BP_SU7_RearWheel
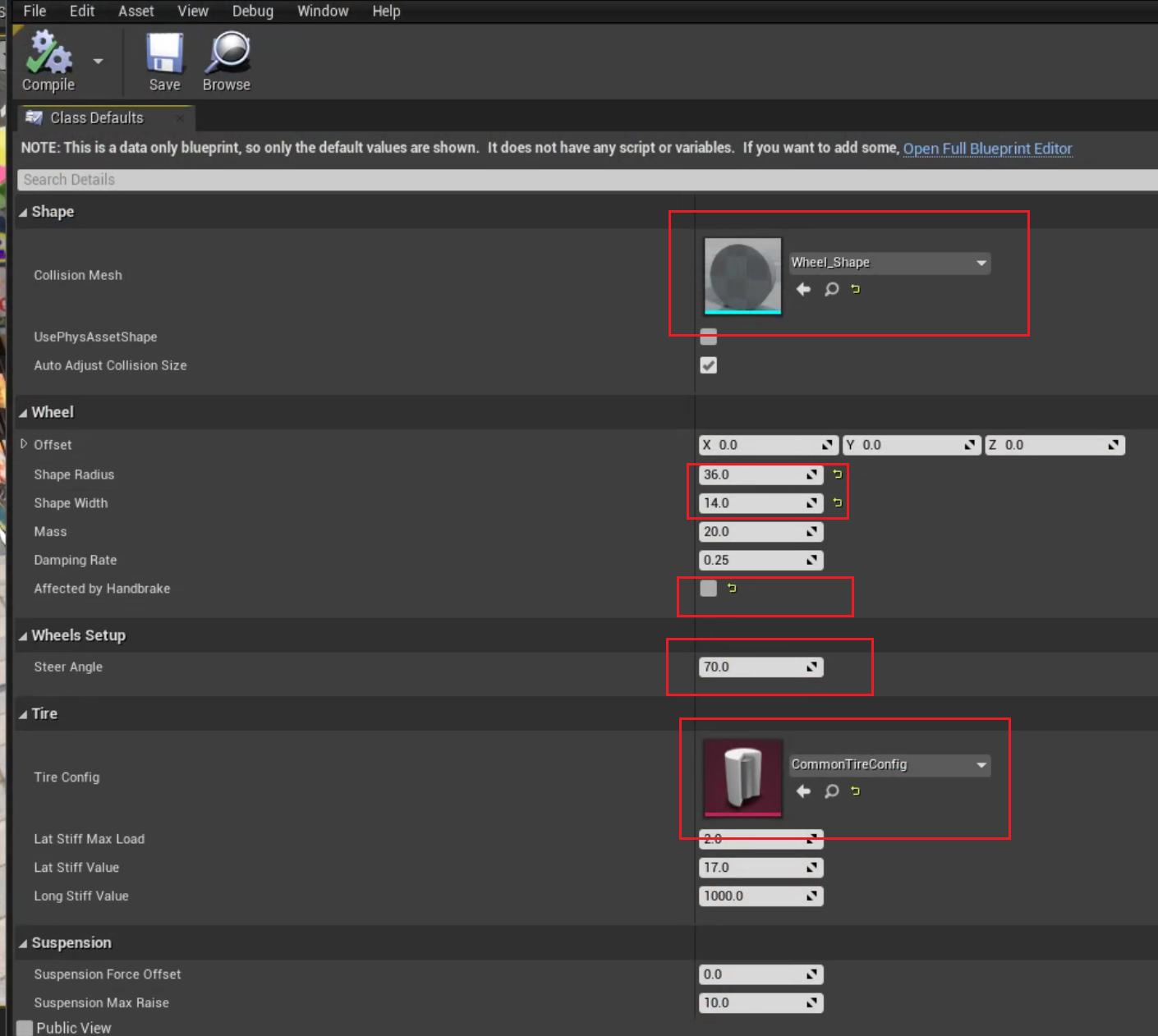
其中FrontWheel如下配置:
Collision Mesh选择为Wheel_Shape,Radius和Width按照实际模型填写(这里因为和特斯拉的车辆尺寸差不多,所以我偷懒了直接使用特斯拉的尺寸),选择不被手刹影响,并且舵角为70
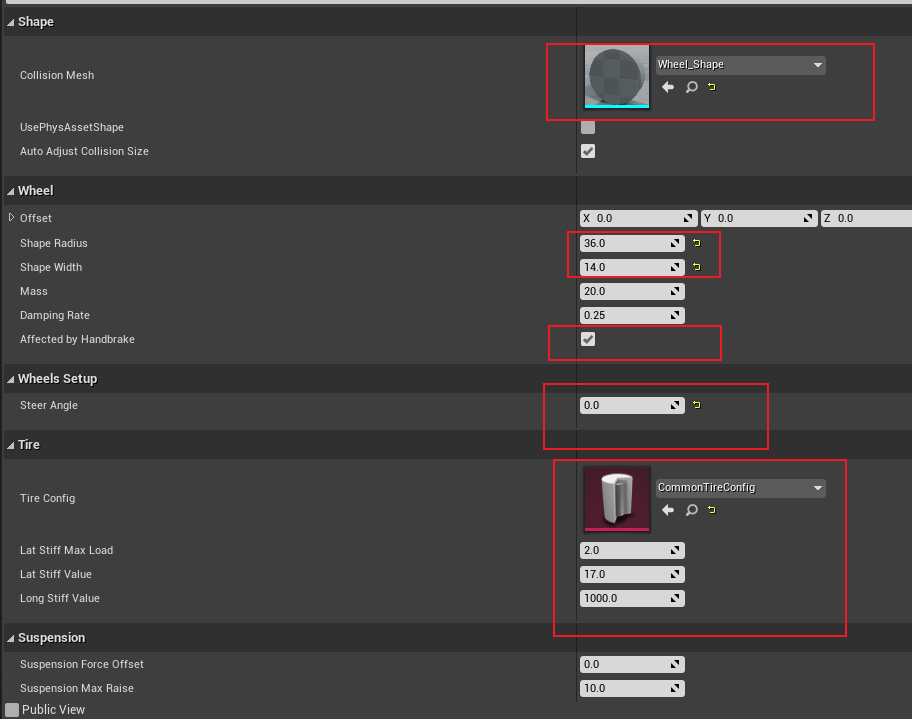
RearWheel也同理,只是勾选可以被手刹影响,并且舵角为0
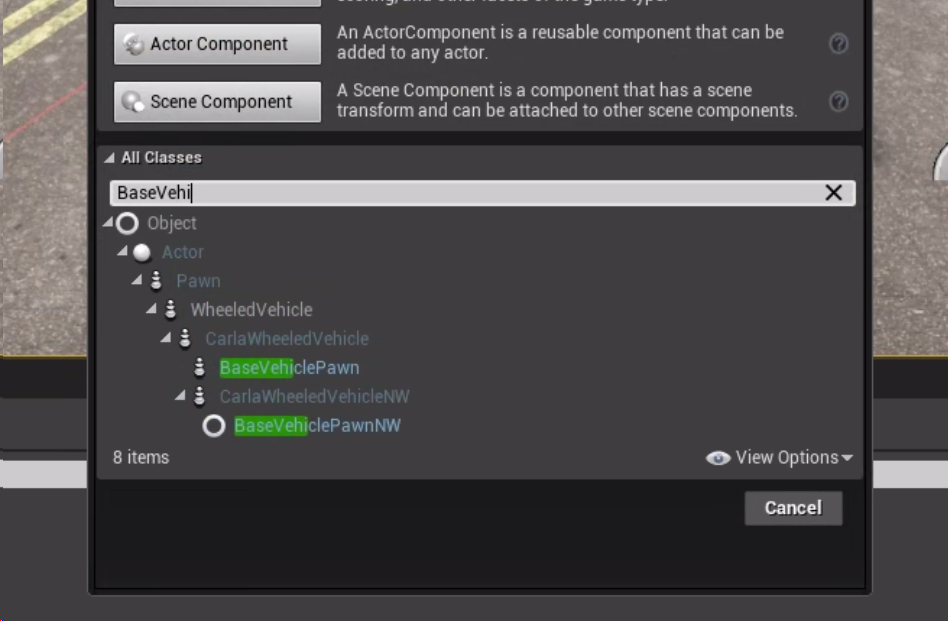
保存并点击左上角编译之后,我们在原地右键新建一个蓝图,选择BaseVehiclePawn
点击打开,分别在Mesh配置我们刚才准备好的动画、骨骼模型以及VehicleMovement中配置四个轮子的蓝图
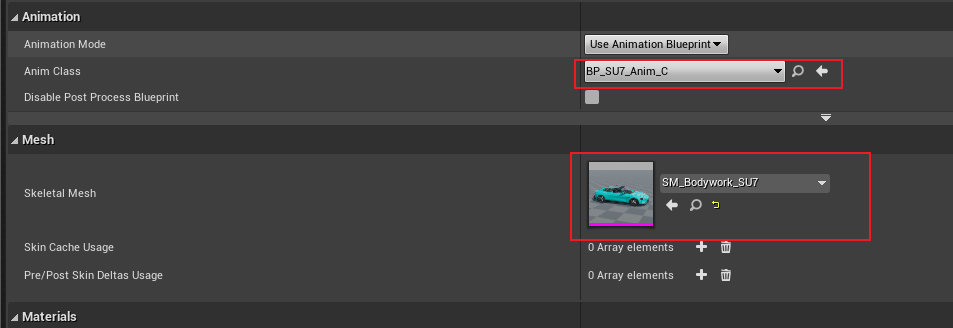
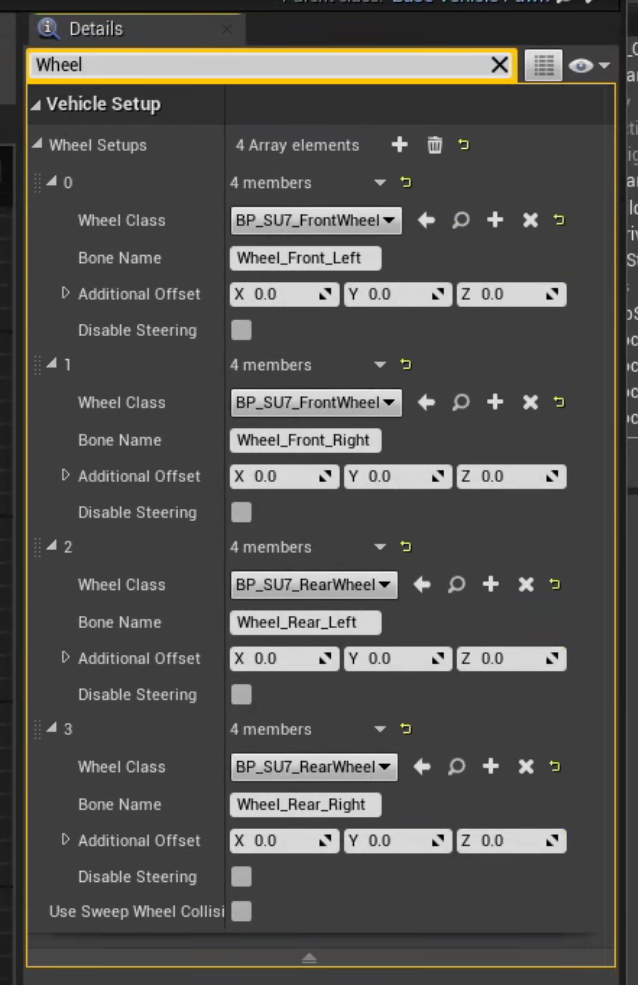
点击左上角编译并保存退出
注册载具
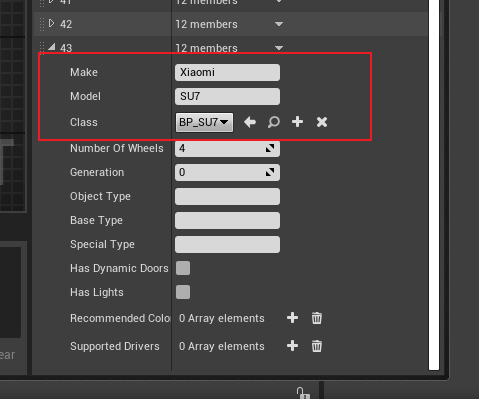
打开Content->Carla-Blueprints->Vehicles->VehicleFactory,点开Vehicles
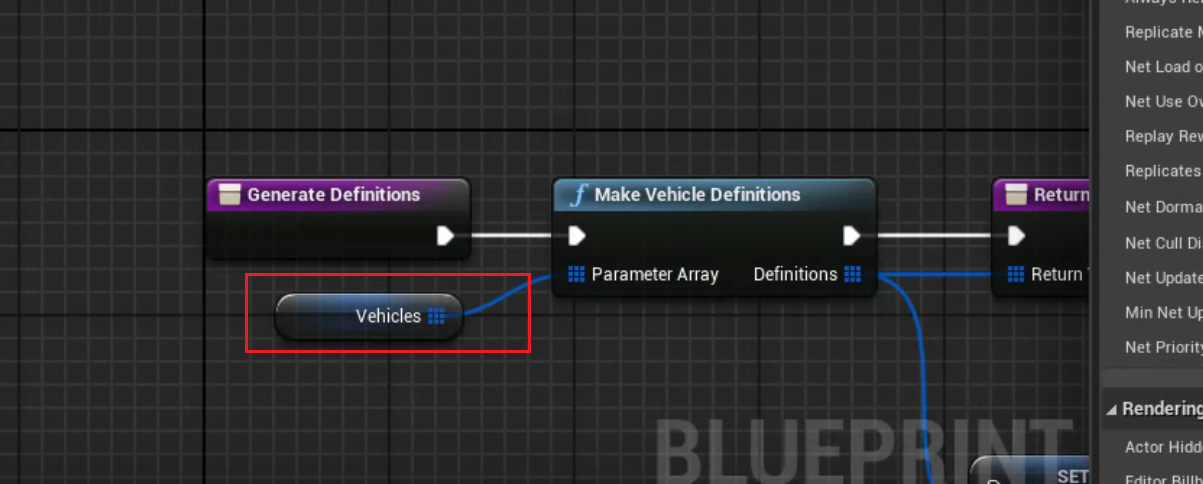
新建一个元素,填入汽车厂商以及型号,并指定为我们刚才创建的载具蓝图,完成之后保存编译退出
测试载具
完成上述所有工作之后,点击右上角的Launch,启动CarLA
待CarLA启动之后,我们打开控制台进入安装有CarLA API的环境,找到官方提供manual_control.py脚本,增加参数--filter su7并启动
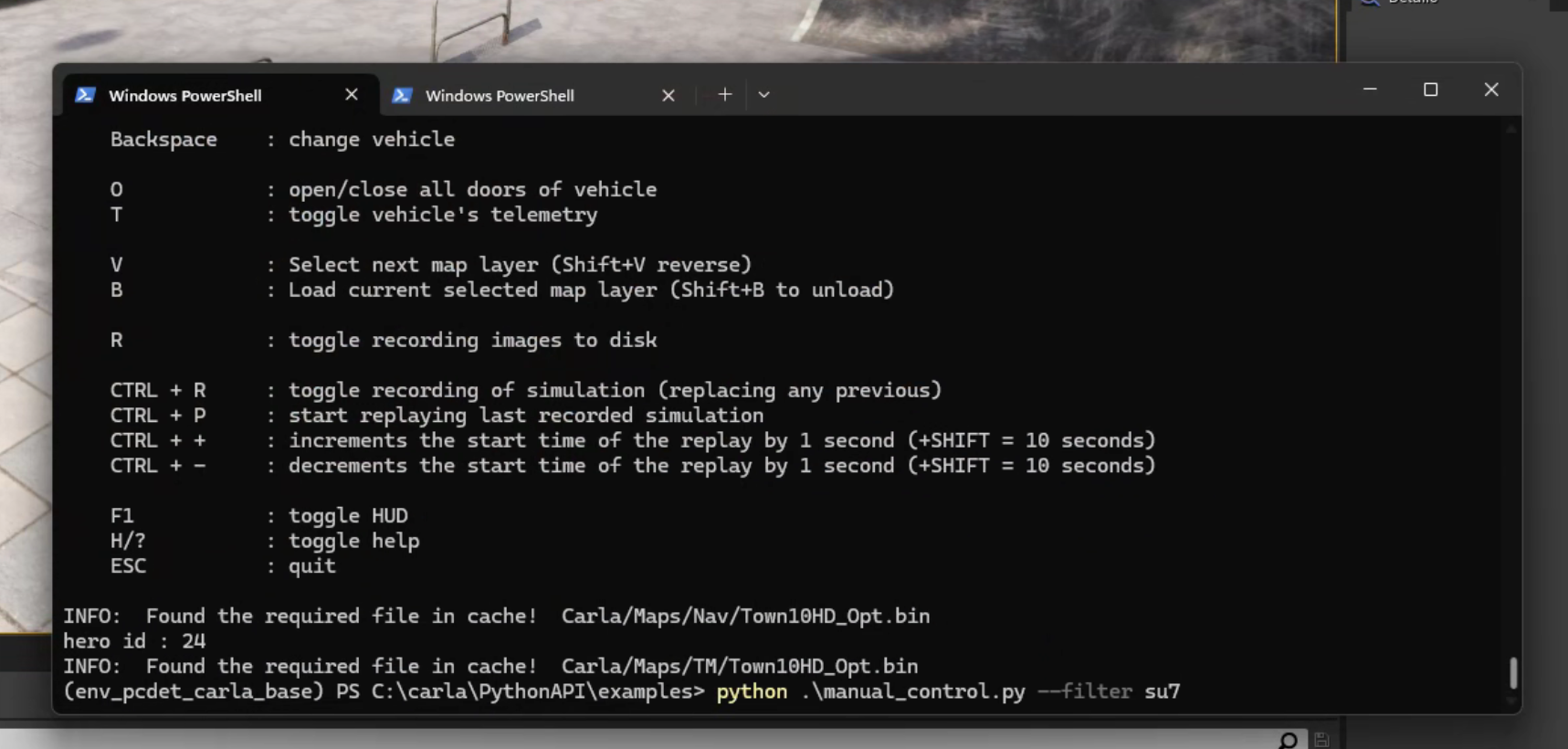
接下来请通过轻推w键以享受你的驾驶之旅!

结语
本文讲述如何将一个模型作为载具添加到CarLA模拟器中,但是注意,目前这个载具还不支持灯光开关、车门开闭以及LiDAR光线反射,我们会在下一个部分进行讲述(如果我还没有弃坑的话)
参考文献
https://carla.readthedocs.io/en/latest/tuto_A_add_vehicle/#add-a-new-vehicle
https://www.youtube.com/watch?v=0F3ugwkISGk
https://github.com/carla-simulator/carla/issues/1779
自动驾驶 | 为CarLA添加一辆小米SU7 Part I的更多相关文章
- 深度学习与自动驾驶领域的数据集(KITTI,Oxford,Cityscape,Comma.ai,BDDV,TORCS,Udacity,GTA,CARLA,Carcraft)
http://blog.csdn.net/solomon1558/article/details/70173223 Torontocity HCI middlebury caltech 行人检测数据集 ...
- Carla 自动驾驶仿真平台的安装与配置指南
简介 Carla 是一款基于 Python 编写和 UE(虚幻引擎)的开源仿真器,用于模拟自动驾驶车辆在不同场景下的行为和决策.它提供了高度可定制和可扩展的驾驶环境,包括城市.高速公路和农村道路等.C ...
- Google Waymo自动驾驶安全技术报告(二)
Waymo的技术在公开道路上.封闭测试场.仿真器进行了广泛的测试,所以可以保证自动驾驶系统的每一部分在其ODD内都有强大.可靠.安全的处理能力. Waymo的自动驾驶系统由三个相互独立.严格测试的子系 ...
- 自动驾驶传感器比较:激光雷达(LiDAR) vs. 雷达(RADAR)
自动驾驶传感器比较:激光雷达(LiDAR) vs. 雷达(RADAR) 据麦姆斯咨询报道,2032年全球范围内自动驾驶汽车的产量将高达2310万辆,未来该市场的复合年增长率(CAGR)高达58%.届时 ...
- [原]JSBSim 自动驾驶(浅出)
jsbsim的脚本文件分为几大类: 1.系统脚本: systems 包含通用飞机各部分功能模块组件以及自动飞行控件:Autopilot.xml 和 自动飞行的算法控件:GNCUtilities.x ...
- 基于DRL和TORCS的自动驾驶仿真系统——之环境配置
基于DRL和TORCS的自动驾驶仿真系统 --之环境配置 玩TORCS和DRL差不多有一整年了,开始的摸爬滚打都是不断碰壁过来的,近来在参与CMU的DRL10703课程学习和翻译志愿者工作,也将自己以 ...
- 自动驾驶缺人才?听听David Silver怎么说!
如今自动驾驶在全球范围内的发展势头愈发“凶猛”,该领域人才也一度被视为“香饽饽”. 即使在美国,自动驾驶工程师的起薪也已经突破了25万美元,我国‘“开价”之高更是令人咋舌. 人才.人才.还是人才!重要 ...
- Apollo自动驾驶框架试玩
2017年7月5日,百度举行了AI开发者大会,在会上发布了Apollo项目,并进行了演示,该项目在Github上已经能够被访问.出于一个程序员的好奇,昨天试玩了一把,确实不错. http://apol ...
- 本科阶段就挑战自动驾驶开发?华为云ModelArts帮你轻松实现!
欢迎添加华为云小助手微信(微信号:HWCloud002 或 HWCloud003),输入关键字"加群",加入华为云线上技术讨论群:输入关键字"最新活动",获取华 ...
- zz自动驾驶中轨迹规划的探索和挑战
大家好,今天我们主要介绍一下轨迹规划的探索和挑战,我主要从四个方面介绍: 轨迹规划的概念 决策 横向规划 纵向规划 轨迹规划的概念: 轨迹规划的核心就是要解决车辆该怎么走的问题.比如我们知道了附近有行 ...
随机推荐
- 【运维必看】Linux命令之lsblk命令
一.命令简介 lsblk命令的英文是"list block",即用于列出所有可用块设备的信息,而且还能显示他们之间的依赖关系,但是它不会列出RAM盘的信息.块设备有硬盘,闪存盘,C ...
- Golang sync.pool源码解析
Golang sync.pool源码解析 - sync.pool - 是什么 - 怎么用 - demo - 真实世界的使用 - 源码解读-数据结构 - 源码解读-读写流程 - 写流程 - 读流程 - ...
- MySQL中联合主键的 in 查询
就一句话: SELECT * from Projects WHERE (Prj,SubID) in (SELECT Prj,SubID FROM SP where stage='设计' and 负责人 ...
- 使用SOUI播放视频
播放视频是一个常规需求. 如果将每一个视频帧转换成rgb格式,再使用gdi贴图,效率会很低,只能适合分辨率很低的视频,1080P全屏软渲染一般的电脑都撑不住. 因此渲染视频通常需要启用硬件渲染.开启硬 ...
- nacos(一): 下载、运行与鉴权配置
1.下载 nacao的官网地址是https://nacos.io/ 当前稳定版本是2.5.0,可以在官网下载,也可以在github上下载.其中,官网提供的下载地址是: https://download ...
- 探寻SRC漏洞平台
探寻SRC漏洞平台 SRC(Security Researcher Acknowledgement Program)是各大互联网厂商开启的漏洞发现奖励计划,也就是我们常说的漏洞赏金计划(bug bou ...
- 安装VMware
安装VMware 官网下载 首先需要进行账号注册:https://support.broadcom.com/ 注册完成后,进行账号登录:https://login.broadcom.com/signi ...
- 你还不会使用Pycham Remote development 打开远程主机工作目录吗?这篇文章帮你解决!
前言 必备: 本地开发机与远程主机都要安装Pycharm专业版!!! 废话不多说直接开始!! 1.打开pycharm 2.依次点击File.Remote Development 3.依次点击SSH.N ...
- 聊聊 FocusSearch/focus_mcp_sql:Text2SQL 的新玩法
最近在 GitHub 上逛的时候,发现了一个挺有意思的项目--FocusSearch/focus_mcp_sql.作为一个对 Text2SQL 有点小研究的前端码农,我忍不住想和大家聊聊这个工具.它不 ...
- Flume - [04] Hive Sink
一.概述 HIVE Sink 将包含分割文本或JSON数据的事件直接流到Hive表或分区中.事件是使用Hive事务编写的.一旦一组事件被提交到Hive,它们就会立即对hive查询可见.流到其中的分 ...