actionlib的身世之谜
不知道为什么会把这么严肃认真的一篇技术整理贴起这么一个故事会风格类似的名字,就这样吧:^)shenmegui
园子里有人整理了actionlib的初学者教程,我来整理下actionlib的细节描述吧。初版偏向于逐字翻译+少量个人理解。等我再长大一些感悟更多的时候再修改更新我的更多理解。我boss说开始学ROS相关就是会很乱的。我是一个喜欢划分割线的奇女子~\(≧▽≦)/~
一、服务端描述
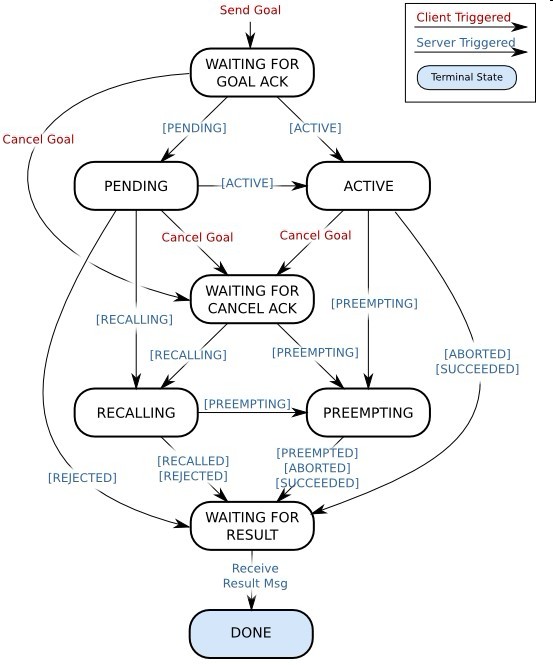
1)goal是在ActionClient端启动的(client会发送sendgoal嘛),一旦ActionServer接收到goal请求,它就会为这个goal创建一个状态机来追踪goal的状态转换,重复三遍,状态机是跟踪goal的不是跟踪ActionServer的:
 zou是这个状态转换图,下面来细说这些个状态:
zou是这个状态转换图,下面来细说这些个状态:
2)服务端状态
- 这些状态的转换大多是服务的实施者触发的(这么生硬的翻译,其实就是服务的程序下同),用小一串命令:
setAccepted - 检查到有goal之后,决定开始处理它
setRejected - 检察到goal后,决定不去处理它,因为它是个无效请求(溢出,资源不可用,无效等)
setSucceeded - 告知goal被正确执行
setAborted - 告知goal在处理时遇到了问题不得不被终止了
setCanceled - 告知因cancle请求,goal不再被执行了
action client也能异步触发状态转换:
CancelRequest: 客户端通知action server它想要server停止处理这个goal服务端状态
服务端状态
中间状态
(前面说了,simple的状态有三个,就是等待执行挂起)
Pending - goal还没有被ActionServer处理
Active - goal正在被AS处理
Recalling - goal没有被处理并且从客户端已发送取消它的命令,但AS还不确定goal已经被取消了(时差导致的?)
Preempting - goal正被处理呢,从AC端收到了取消请求,但AS还不确定goal已经被取消了
终点状态
Rejected - AC没有发cancle请求,goal被AS不处理直接拒绝了The goal was rejected by the action server without being processed and without a request from the action client to cancel
Succeeded - goal被AS成功实现 was achieved successfully by the action server
Aborted - goal被AS终止没有AC的cancle请求
Recalled - 在AS开始执行之前这个goal被另一个goal或者cancle请求取消了
Preempted - 处理中的goal被另一个goal或者AC的取消请求给取消了
并发问题
setAccepted-CancelRequest vs CancelRequest-setAccepted:
直接的说就是AS能在收到CR之后仍然能把goal给SA。这是因为执行CR的异步竞争机制,那是,因为除了server之外的其他代码触发了状态转换,server不能确定现在到底是在[PENDING]还是 [RECALLING]状态。
二、客户端描述
1)客户端状态机
actionlib中,认为server的状态机是主机,client的状态机是从机/耦合机,它在追随主机的状态。
2)客户端转换
服务端触发转换
Reported [State]: 因为client在追随主机状态,很多状态的转换都是通知自己状态转换后触发client的状态转换
Receive Result Message: 这种状态,server给client发送result message。接收到result就意味着追踪这个goal 结束了
客户端触发转换
Cancel Goal: 请求server停止处理这个goal
"略过" 状态
- 鉴于ROS是基于传输层协议,非常有可能client并不能收到所有server状态的更新。因此,我们允许客户端状态机“略过”server的触发状态
Example: 客户端在 [WAITING FOR GOAL ACK]状态, 收到 [PREEMPTED]server的更新状态, 客户端状态可以跳过 [ACTIVE]状态,直接转移到 [WAITING FOR RESULT]状态
因为多AC可以连接单一AS,因此允许一个client取消另一个client的goal。因此当收到server的[RECALLING]状态时允许client从 [PENDING] 转移到 [RECALLING]状态
三、Action接口和传输协议
Action客户端和服务端通过预定义的action协议交流。这个action协议依赖ROS topics在一个ROS规定的命名空间中传递消息

- ROS Messages
goal - 用于给目标发送新的服务
cancel - 用来给服务发送取消命令
status - 用来通知当前状态下系统中所有goal的状态
feedback - 用来给客户端定期定期发送辅助信息
- result - 用来在goal完成后给发送客户端一次信息
1)数据组合和goal ID
goal ID是字符串类型字段
------明天写*^_^*
四、协议
1)Simple Action Client
一般,高层的应用和可执行文件并不关心goal是否被处理或是否完整。他们才不关心中间状态呢。Simple Action Client的原始客户端状态机只有三个状态:Pending, Active, & Done

1.1)客户端状态模糊
单独客户端状态是不够确定SimpleClient状态的,但这很容易通过观察客户端状态转移来解决.如果客户端状态转移并未使SC状态转移.SC状态就不更新.
栗子:如果客户端从RECALLING转移到WAITING FOR RESULT,SC的状态仍然在PENDING.
1.2)多goal协议
Simple Action Client一次只追踪一个goal。当用户使用simple client发送一个goal时, 它会取消前一个goal的所有回调并使停止追踪它的状态,注意它并不是取消前一个goal!
1.3)线程模式(C++)
基于简单的action客户端结构,用户决定是否要自旋另一个线程
不要额外线程 (推荐)
- 客户端所有用户都注册到全局回调队列
- 用户的action回调是从ros::spin中回调的,因此,阻断用户的动作回调会组织全局回调队列被服务端处理
自旋一个线程
- action client的所有订阅者都会注册到一个回调队列。这个队列与全局回调队列分离,这个队列服务于自旋线程
- 用户的action回调队列被称为spun up线程,虽然堵在action回调不会阻止其他ROS消息被服务,但仍不推荐这样用,因为这个action的status feedback和反馈都不能被服务
一个(可能是唯一一个)自旋一个额外线程的有点是用户可以不用在app中调用ros::spin()
2)Simple Action Server
很多action server遵循同样的模式,就是在同一时间只能有一个标签是活跃的,并且新的goal可以抢占先前的goal。设计action server包装的simple action server是为了强制这个简单协议去处理goal

当从action client接收到一个新goal时,simple action server将这个goal移到等待槽。如果这个goal已经占据了等待槽,sipmle action server 将这个目标设置为cancle,并用线上到来的其他目标取代它。

好没有动力继续写啊。。。。。。%>_<%
actionlib的身世之谜的更多相关文章
- ROS actionlib学习(一)
actionlib是ROS中一个很重要的功能包集合,尽管在ROS中已经提供了srevice机制来满足请求—响应式的使用场景,但是假如某个请求执行时间很长,在此期间用户想查看执行的进度或者取消这个请求的 ...
- ROS知识(17)----Actionlib使用的例子
1.Actionlib原理 英文版:DetailedDescription 翻译版:actionlib的身世之谜 2.Actionlib官方教程 Actionlib是ros的重要部件,对于复杂动作的执 ...
- ROS actionlib学习(三)
下面这个例子将展示用actionlib来计算随机变量的均值和标准差.首先在action文件中定义goal.result和feedback的数据类型,其中goal为样本容量,result为均值和标准差, ...
- ROS actionlib学习(二)
在ROS actionlib学习(一)中的例子展示了actionlib最基本的用法,下面我们看一个稍微实际一点的例子,用actionlib计算斐波那契数列,并发布反馈(feedback)和结果(res ...
- ROS知识(15)----Actionlib的使用(一)
Actionlib是ROS非常重要的库,像执行各种运动的动作,例如控制手臂去抓取一个杯子,这个过程可能复杂而漫长,执行过程中还可能强制中断或反馈信息,这时Actionlib就能大展伸手了. 1.原理 ...
- 第十二课 Actionlib(1)
一\Actionlib概念 在ROS系统中,有时需发送请求给某个节点完成相应的任务,同时获得一个一个响应,这种情况下可以通过ROS服务来 完成;然而,在某些情况下,服务需要很长时间才能执行完,如让机器 ...
- 通过actionlib控制jaco机械臂
为了安全,先写一个简单控制三个手指的程序: 根据驱动包内kinova_fingers_action.cpp服务器写客户端程序 #include <ros/ros.h> #include & ...
- actionlib学习
ROS中的服务service是一问一答的形式,你来查询了,我就返给你要的信息. action也有服务的概念,但是它不一样的地方是:不是一问一答,而多了一个反馈,它会不断反馈项目进度. 如navigat ...
- 第十三课 Actionlib(2)
上节课讲到了客户端,这节课讲解一下服务器 1.创建服务器源文件touch fibonacciserver.cpp 2.编写源文件 3.修改CMakeLists.txt 4.编译之catkin_make ...
随机推荐
- 把Java生成的RSA公钥、私钥转换成.NET使用的XML格式
import java.security.KeyFactory; import java.security.interfaces.RSAPrivateCrtKey; import java.secur ...
- 12个优秀用户体验的移动应用程序 UI 设计
最美丽的,现代化的和惊人的移动 UI 设计就在这里.今天,我们挑选了12个来自 Behance 和 Dribbble 网站的优秀用户体验的手机界面设计.这些界面设计作品都是由世界各地的优秀设计师分享, ...
- js方法实现rgb颜色转换成16进制格式的代码的方法
原文地址:http://www.cnblogs.com/vaal-water/archive/2013/04/08/3008880.html 自己试过很好用 function zero_fill_he ...
- delphi 事件和属性的绑定
TWindowState = (wsNormal, wsMinimized, wsMaximized); TScrollingWinControl = class(TWinControl) priva ...
- 百度在线编辑器UEditor(v1.3.6) .net环境下详细配置教程
UEditor是百度开发团队奉献的一款很不错的在线编辑器.在百度自己很多产品上都有应用,本文主要是该编辑器的配置教程. 1.下载UEditor,当前最新版本是1.3.6.这里下载的.net版本,选择U ...
- spring.net (1) 概念-控制反转(又名依赖注入)
Spring.net 作为一个应用程序框架,在构建企业级.net应用程序提供了很多灵活而又丰富的功能(如:依赖注入,aop,数据访问抽象,asp.net 扩展). 控制反转: Inversion of ...
- Ubuntu 安装系统资源托盘监视应用
安装 sudo apt-get install indicator-multiload 打开 indicator-multiload 设置开机启动 sudo gedit /etc/rc.loca ...
- Swift-Switch穿透
switch vegetable { case "celery": print("Add some raisins and make ...
- [读书笔记] CSS权威指南1: 选择器
通配选择器 可以与任何元素匹配,就像是一个通配符 /*每一个元素的字体都设置为红色*/ * { color: red; } 元素选择器 指示文档元素的选择器. /*为body的字体设置为红色*/ bo ...
- IOS开发之小实例--使用UIImagePickerController创建一个简单的相机应用程序
前言:本篇博文是本人阅读国外的IOS Programming Tutorial的一篇入门文章的学习过程总结,难度不大,因为是入门.主要是入门UIImagePickerController这个控制器,那 ...