teb教程7
融合自定义的障碍物
简介:本部分讲解怎样考虑其他节点发布的多边形的障碍物。
1.在一些应用当中,可能不想依赖于代价地图或者想添加其他的除了点状的障碍物。你可以发送你自己的障碍物列表到teb_local_planner包里面,通过指定话题/obstacles.
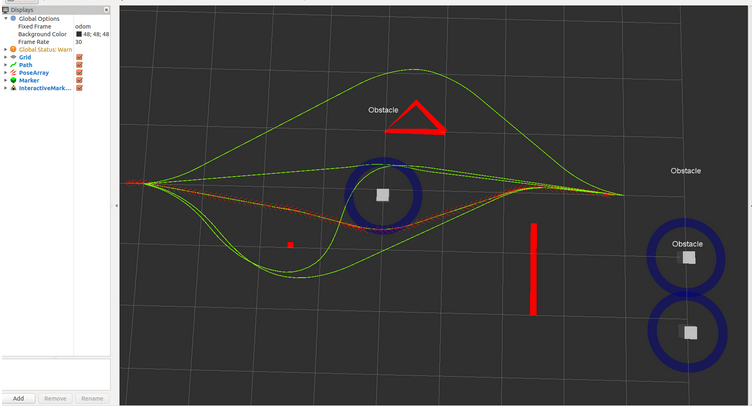
下面的消息类型costmap_converter/ObstacleArrayMsg是costmap_converter包的一部分。说明了以下障碍物的类型:
点状障碍物:提供了单个顶点的几何形状;
圆圈障碍物:提供了单个顶点且非零半径的几何形状;
线障碍物:提供了两个顶点的几何形状;
多边形障碍物:提供了不只2个顶点的多边形;
2.写一个简单的障碍物发不器
创建一个简单的python节点类发不一些障碍物;对于规划部分,会运行test_optim_node节点。如下publish_obstacles.py
#!/usr/bin/env python
import rospy, math
from costmap_converter.msg import ObstacleArrayMsg, ObstacleMsg
from geometry_msgs.msg import PolygonStamped, Point32 def publish_obstacle_msg():
rospy.init_node("test_obstacle_msg") pub = rospy.Publisher('/test_optim_node/obstacles', ObstacleArrayMsg, queue_size=) obstacle_msg = ObstacleArrayMsg()
obstacle_msg.header.stamp = rospy.Time.now()
obstacle_msg.header.frame_id = "odom" # CHANGE HERE: odom/map # Add point obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
obstacle_msg.obstacles[].polygon.points = [Point32()]
obstacle_msg.obstacles[].polygon.points[].x = 1.5
obstacle_msg.obstacles[].polygon.points[].y =
obstacle_msg.obstacles[].polygon.points[].z = # Add line obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
line_start = Point32()
line_start.x = -2.5
line_start.y = 0.5
line_end = Point32()
line_end.x = -2.5
line_end.y =
obstacle_msg.obstacles[].polygon.points = [line_start, line_end] # Add polygon obstacle
obstacle_msg.obstacles.append(ObstacleMsg())
obstacle_msg.obstacles[].id =
v1 = Point32()
v1.x = -
v1.y = -
v2 = Point32()
v2.x = -0.5
v2.y = -1.5
v3 = Point32()
v3.x =
v3.y = -
obstacle_msg.obstacles[].polygon.points = [v1, v2, v3] r = rospy.Rate() # 10hz
t = 0.0
while not rospy.is_shutdown(): # Vary y component of the point obstacle
obstacle_msg.obstacles[].polygon.points[].y = *math.sin(t)
t = t + 0.1 pub.publish(obstacle_msg) r.sleep() if __name__ == '__main__':
try:
publish_obstacle_msg()
except rospy.ROSInterruptException:
pass
如何运行:
roslaunch teb_local_planner test_optim_node.launch
roslaunch mypublisher publish_obstacles.py
相关参数:
在规划中,与自定义障碍物相关的参数
~<name>/min_obstacle_dist: Desired minimal distance from obstacles ~<name>/include_costmap_obstacles: Deactivate costmap obstacles completely ~<name>/costmap_obstacles_behind_robot_dist: Maximum distance behind the robot searched for occupied costmap cells. ~<name>/obstacle_poses_affected: Specify how many trajectory configurations/poses should be taken into account next to the closest one. ~<name>/weight_obstacle: Optimization weight for keeping a distance to obstacles. ~<name>/footprint_model: The robot footprint model
teb教程7的更多相关文章
- teb教程1
http://wiki.ros.org/teb_local_planner/Tutorials/Setup%20and%20test%20Optimization 简介:本部分关于teb怎样优化轨迹以 ...
- teb教程8
融合动态障碍物 简介:考虑怎样把其他节点发布的动态障碍物考虑进来 1.本部分演示了动态障碍物该如何被包含到teb_local_planner中. 2.写一个简单的动态障碍物的发布器publish_dy ...
- teb教程3
配置和运行机器人导航 简介:配置teb_local_planner作为navigation中local planner的插件 参考teb安装 由于局部代价地图的大小和分辨率对优化性能影响很大,因为占据 ...
- teb教程10 teb questions
http://wiki.ros.org/teb_local_planner/Tutorials/Frequently%20Asked%20Questions
- teb教程9
通过costmap_converter来跟踪和包含动态障碍物 简介:利用costmap_converter来很容易跟踪动态障碍物 1.costmap_converter中提供了一个插件称之为costm ...
- teb教程6
代价地图的转换 简介:本部分关于怎样把代价地图转换插件应用到转换占据栅格costmap2d到几何形状来优化(测试阶段) teb_local_planner包支持costmap_converter插件, ...
- teb教程5
跟随全局规划器 简介:本部分是关于如何配置局部规划器严格跟随全局规划,也包括调节在时优和路径跟随上的权衡. 1.先看一下via-points当前的优化行为:启动下面节点 roslaunch teb_l ...
- teb教程4
障碍物避障以及机器人足迹模型 简介:障碍物避障的实现,以及必要参数的设置对于机器人足迹模型和其对应的影响 1.障碍物避障是怎样工作的 1.1 惩罚项 障碍物避障作为整个路径优化的一部分.显然,优化是找 ...
- teb教程2
http://wiki.ros.org/teb_local_planner/Tutorials/Inspect%20optimization%20feedback 检查优化反馈 简介:怎样检查优化的轨 ...
随机推荐
- BUUCTF Youngter-drive
exe逆向,首先查壳,发现有upx壳,upx -d脱壳,拖进ida找到主函数这里可以看到创建了两个线程,先沿着StartAddress,一直找到sub_411940,这里有一个问题,当使用f5是,会显 ...
- BUUCTF 梅花香自苦寒来
梅花香自苦寒来 打开图片可以看到,在jpg后面有大量的数据,将它保存出来,可以看出是十六进制,将它转为ascii,写脚本 with open('hex.txt','r') as h: h=h.read ...
- object in depth
创建和修改属性 创建对象 const myObject = {}; //字面量表示法 const myObject = new Object(); //Object() 构造函数 修改属性 ---- ...
- 箭头函数与普通function的区别
1. 箭头函数没有自己的this,它里面的this是继承所属上下文中的this,而且使用call与apply都无法改变 let obj = { name: 'obj' } function fn1() ...
- Dagger2 探索记2——四大基本组件(二)
书接上文,先回顾以下前一章写的内容. 内容大概就是在Activity中用@Inject标记一个注入的类,然后在这个类的构造函数上也打个@Inject标记,然后使用@Component来连接两边,完成对 ...
- 如何解决“ VMware Workstation 不可恢复错误: (vcpu-0) vcpu-0:VERIFY vmcore/vmm/main/cpuid.c:386 bugNr=1036521”
第一次装虚拟机,装centos7遇到的坑: 1. 出现 “VMware Workstation 不可恢复错误: (vcpu-0) vcpu-0:VERIFY vmcore/vmm/main/cpuid ...
- DNS安装配置主从
准备环境 关闭防火墙 挂载一下 更改配置文件 安装dns服务 更改配置文件 先复制保存一份
- 有趣的taskset命令,使进程再指定CPU上运行
前言 taskset命令,用于进程的CPU调优,可以把某进程,指定再某CPU内工作. 如还不明白,可以参考此文 http://www.361way.com/linux-context-switch/5 ...
- 转帖 移动前端开发之viewport的深入理解
在移动设备上进行网页的重构或开发,首先得搞明白的就是移动设备上的viewport了,只有明白了viewport的概念以及弄清楚了跟viewport有关的meta标签的使用,才能更好地让我们的网页适配或 ...
- 转帖 Java生成和操作Excel文件
JAVA EXCEL API:是一开放源码项目,通过它Java开发人员可以读取Excel文件的内容.创建新的Excel文件.更新已经存在的Excel文件.使用该API非Windows操作系统也可以通过 ...