Harris 角点检测
一 、Motivation
对于做图像处理的人来说,Harris角点检测肯定听过,1988年发表的文章“A combined corner and edge detector”描述了这种角点检测方法,这篇论文朴实无华,对于图像处理入门来说,非常值得读一读。
Harris角点检测的提出是图像匹配问题的需求,在立体视觉(stereo vision)和运动估计(motion estimation)中,常常需要在两个view(立体视觉)或者同一视频的两帧(运动估计)中找到对应的特征(correspondence feature),如下图1.1所示。
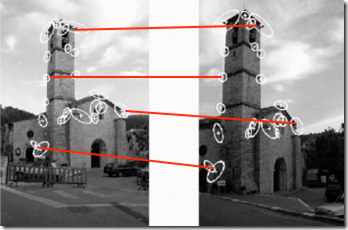
图 1.1
以patch matching 为例,若在两个view中提取出来的patch 如下图1.2,那么匹配两幅图中相似的patch是比较容易的,
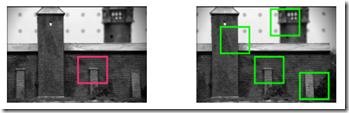

图 1.2
而如果两个view中提取出来的patch如下图1.3,那么匹配就不那么容易了,
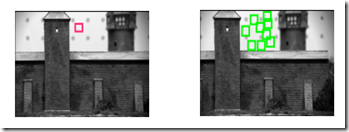

图 1.3
为什么呢?因为图1.2中的patch很独特,信息丰富,图1.3 中的patch单独看来毫无特点,极易混淆。我们称图1.2中的特征为“好特征”,图1.3中的特征是”坏特征“。
那么什么是好特征,什么是坏特征?我认为有两个要考虑的:1 稳定,对缩放,视角变换,光线变化等稳定 2.易区分 。
角点就具有这样的特征,角点如何描述,请看图1.4,
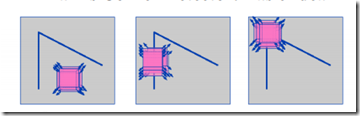
图1.4
上图具体解释是这样的,给定一个窗口,如果包含角点,那么这个窗口平移(u,v)个单位,不管这个平移是往哪个方向,窗口中像素对应位置的变化都比较大,而如果包含的是一条边缘,在沿着边缘平移窗口时,窗口中像素强度变化基本没有,而垂直于边缘移动时,变化强烈,对于平坦区域,怎么移动都没有多大变化,当然,这里的平移都是小范围平移。
二、Mathematics representation
数学描述这种强度变化如下图2.1.
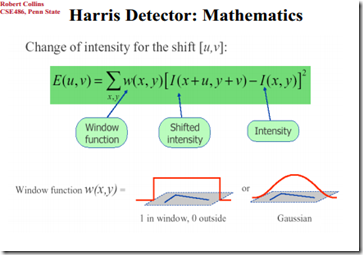
图2.1
可以看到,这个公式表示往各个方向移动时强度变化的累加和,控制w就可以控制平移后强度累加的方式。
然后用一级泰勒展开近似I(x+u,y+v)-I(x,y),并将上图的公式用矩阵的形式表达出来,有:
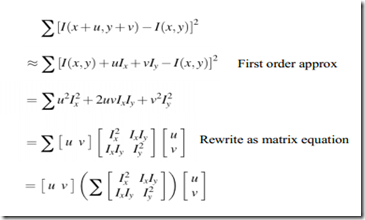
图2.2
最后 E(u,v) 可以表示为:
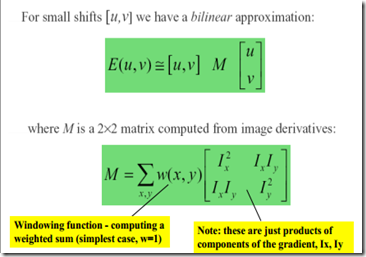
图 2.3
注意到此时M是对称矩阵,可以表示为M = Q A QT 的形式 ,A 为对角矩阵,因此,对角中即为M的特征值,因此,一定要M的2个特征值都比较大才能保证E总是很大。
实际计算过程中,用高斯核来表示w(x,y).
Harris 角点检测的过程如下:
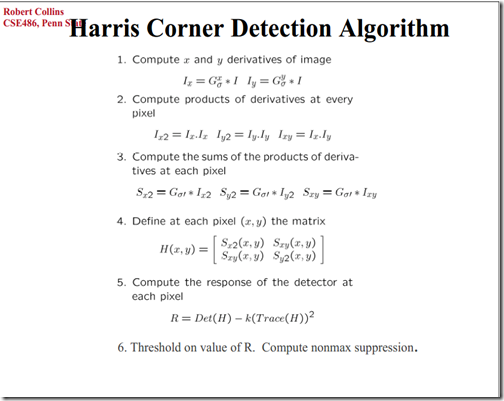
图2.4
需要注意的是,求微分图像和第三步的W矩阵都是可以调节或者换成其他形式的,W换成高斯核主要是利用了它各项同性的性质。
三、implementation
最终matlab代码(转自网上)实现如下:
% Harris detector % The code calculates % the Harris Feature Points(FP) % % When u execute the code, the test image file opened % and u have to select by the mouse the region where u % want to find the Harris points, % then the code will print out and display the feature % points in the selected region. % You can select the number of FPs by changing the variables % max_N & min_N % A. Ganoun load Imag I =double(frame); %**************************** imshow(frame); k = waitforbuttonpress; point1 = get(gca,'CurrentPoint'); %button down detected rectregion = rbbox; %%%return figure units point2 = get(gca,'CurrentPoint');%%%%button up detected point1 = point1(1,1:2); %%% extract col/row min and maxs point2 = point2(1,1:2); lowerleft = min(point1, point2); upperright = max(point1, point2); ymin = round(lowerleft(1)); %%% arrondissement aux nombrs les plus proches ymax = round(upperright(1)); xmin = round(lowerleft(2)); xmax = round(upperright(2)); %*********************************** Aj=6; cmin=xmin-Aj; cmax=xmax+Aj; rmin=ymin-Aj; rmax=ymax+Aj; min_N=12;max_N=16; %%%%%%%%%%%%%%Intrest Points %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% sigma=2; Thrshold=20; r=6; disp=1; dx = [-1 0 1; -1 0 1; -1 0 1]; % The Mask dy = dx'; %%%%%% Ix = conv2(I(cmin:cmax,rmin:rmax), dx, 'same'); Iy = conv2(I(cmin:cmax,rmin:rmax), dy, 'same'); g = fspecial('gaussian',max(1,fix(6*sigma)), sigma); %%%%%% Gaussien Filter
%%%%% Ix2 = conv2(Ix.^2, g, 'same'); Iy2 = conv2(Iy.^2, g, 'same'); Ixy = conv2(Ix.*Iy, g,'same'); %%%%%%%%%%%%%% k = 0.04; R11 = (Ix2.*Iy2 - Ixy.^2) - k*(Ix2 + Iy2).^2; R11=(1000/max(max(R11)))*R11; R=R11; ma=max(max(R)); sze = 2*r+1; MX = ordfilt2(R,sze^2,ones(sze)); R11 = (R==MX)&(R>Thrshold); count=sum(sum(R11(5:size(R11,1)-5,5:size(R11,2)-5))); figure;plot(R11); loop=0; while (((count<min_N)|(count>max_N))&(loop<30)) if count>max_N Thrshold=Thrshold*1.5; elseif count < min_N Thrshold=Thrshold*0.5; end R11 = (R==MX)&(R>Thrshold); count=sum(sum(R11(5:size(R11,1)-5,5:size(R11,2)-5))); loop=loop+1; end R=R*0; R(5:size(R11,1)-5,5:size(R11,2)-5)=R11(5:size(R11,1)-5,5:size(R11,2)-5); [r1,c1] = find(R); PIP=[r1+cmin,c1+rmin];%% IP %%%%%%%%%%%%%%%%%%%% Display Size_PI=size(PIP,1); for r=1: Size_PI I(PIP(r,1)-2:PIP(r,1)+2,PIP(r,2)-2)=255; I(PIP(r,1)-2:PIP(r,1)+2,PIP(r,2)+2)=255; I(PIP(r,1)-2,PIP(r,2)-2:PIP(r,2)+2)=255; I(PIP(r,1)+2,PIP(r,2)-2:PIP(r,2)+2)=255; end imshow(uint8(I)) |
Harris 角点检测的更多相关文章
- Harris角点检测算法优化
Harris角点检测算法优化 一.综述 用 Harris 算法进行检测,有三点不足:(1 )该算法不具有尺度不变性:(2 )该算法提取的角点是像素级的:(3 )该算法检测时间不是很令人满意. 基于以上 ...
- Harris角点检测
代码示例一: #include<opencv2/opencv.hpp> using namespace cv; int main(){ Mat src = imread(); imshow ...
- Harris角点检测算原理
主要参考了:http://blog.csdn.net/yudingjun0611/article/details/7991601 Harris角点检测算子 本文将该文拷贝了过来,并做了一些数学方面的 ...
- Harris角点检测原理分析
看到一篇从数学意义上讲解Harris角点检测很透彻的文章,转载自:http://blog.csdn.net/newthinker_wei/article/details/45603583 主要参考了: ...
- cv2.cornerHarris()详解 python+OpenCV 中的 Harris 角点检测
参考文献----------OpenCV-Python-Toturial-中文版.pdf 参考博客----------http://www.bubuko.com/infodetail-2498014. ...
- Opencv学习笔记------Harris角点检测
image算法测试iteratoralgorithmfeatures 原创文章,转载请注明出处:http://blog.csdn.net/crzy_sparrow/article/details/73 ...
- harris角点检测的简要总结
目录 1. 概述相关 2. 原理详解 1) 算法思想 2) 数学模型 3) 优化推导 3. 具体实现 1) 详细步骤 2) 最终实现 4. 参考文献 1. 概述相关 harris角点检测是一种特征提取 ...
- OpenCV-Python:Harris角点检测与Shi-Tomasi角点检测
一.Harris角点检测 原理: 角点特性:向任何方向移动变换都很大. Chris_Harris 和 Mike_Stephens 早在 1988 年的文章<A CombinedCorner an ...
- 第十一节、Harris角点检测原理(附源码)
OpenCV可以检测图像的主要特征,然后提取这些特征.使其成为图像描述符,这类似于人的眼睛和大脑.这些图像特征可作为图像搜索的数据库.此外,人们可以利用这些关键点将图像拼接起来,组成一个更大的图像,比 ...
随机推荐
- 认识RGB和YUV
多年来,对于大部分人来说,对图形信号的认识不外有三种:射频信号,复合视频信号,S视频信号.射频信号是由复合视频信号调到高频上,普通电视机的天线输入信号用于射频信号,复合视频信号的输入出是用RGA端子. ...
- nginx上用fastcgi配置python环境
费了2天的功夫,翻阅了无数的中文.英文资料,终于搞定.写下此文留待以后翻阅用 本文环境,centOS 5.4 ,Nignx-0.8.49, Python 2.6.5 ========== ...
- 大象的崛起!Hadoop七年发展风雨录
http://www.open-open.com/news/view/a22597 在互联网这个领域一直有这样的说法:“如果老二无法战胜老大,那么就把老大赖以生存的东西开源吧”.当年Yahoo!与Go ...
- Android进程守护
http://blog.csdn.net/t12x3456/article/details/8982198 http://blog.csdn.net/ljx19900116/article/detai ...
- linux ln命令 创建链接(快捷方式)
命令格式: ln -s 目标地址 链接名称 # 假设/home目录下有wuyou文件夹,你要在当前目录创建一个链接指向它 $ ln -s /home/wuyou wuyou_link
- MVC 文件上传和图片剪辑
http://www.cnblogs.com/hinton/archive/2012/03/01/2375465.html http://gallery.kissyui.com/uploader/1. ...
- Java IO2:字节流
输入输出流: • 输入/输出时, 数据在通信通道中流动. 所谓“数据流(stream)”指的是所有数据通信通道之中,数据的起点和终点. 信息的通道就是一个数据流.只要是数据从一个地方“流” 到另外一个 ...
- Servlet的一些细节问题
Servlet的细节问题 1.一个已经注册的Servlet可以被多次映射即: <servlet> <!-- servlet的注册名 --> <servlet-name&g ...
- Android ListView避免多线程加载一个同一资源
当我们的ListView中的Item包含图片,而且这些图片是同一资源,我们用多线程去加载图片,这时候可能就发生了这种情况. 比如线程是人,第一个人去做加载图片到缓存的工作,还没做好时第二个人要这同一张 ...
- IPC是什么意思?
IPC(Inter-Process Communication,进程间通信)IPC ( Instruction per Clock 及CPU每一时钟周期内所执行的指令多少) IPC代表了一款处理器的设 ...