『OpenCV3』霍夫变换原理及实现
霍夫变换常用于检测直线特征,经扩展后的霍夫变换也可以检测其他简单的图像结构。
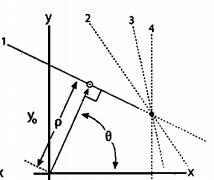
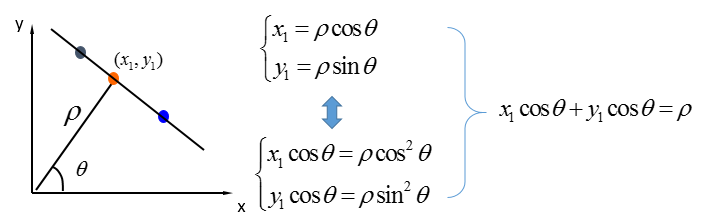
在霍夫变换中我们常用公式
ρ = x*cosθ + y*sinθ
表示直线,其中ρ是圆的半径(也可以理解为原点到直线的距离),θ是直线与水平线所成的角度(0~180°),确定了它们,也就确定一条直线了,和下图略有出入的是实际的原点定在图片左上角。
原理是对于输入的二值图像中的像素点(有值的),按照步长(参数三参数四对应rho和theta的步长)分别计算出每个点上的所有可能的直线。记录下每条直线经过的点数(即存在多个点计算出的直线有交集),按照阈值(参数五)筛选符合条件的图像,下面给出基本霍夫变换的由来,原文见:霍夫变换。
基本原理
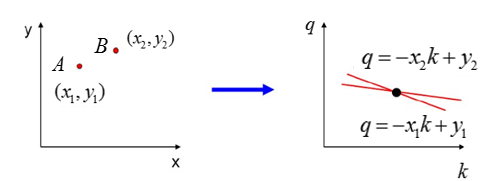
一条直线可由两个点A=(X1,Y1)和B=(X2,Y2)确定(笛卡尔坐标)

另一方面, 也可以写成关于(k,q)的函数表达式(霍夫空间):
也可以写成关于(k,q)的函数表达式(霍夫空间):
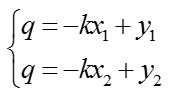
对应的变换可以通过图形直观表示:
变换后的空间成为霍夫空间。即:笛卡尔坐标系中一条直线,对应霍夫空间的一个点。
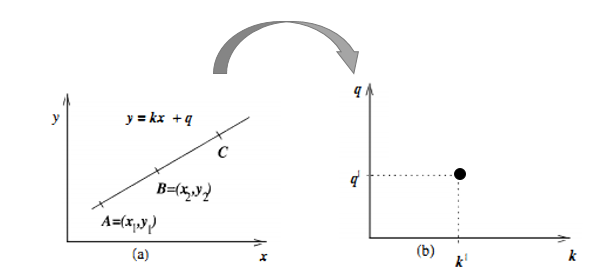
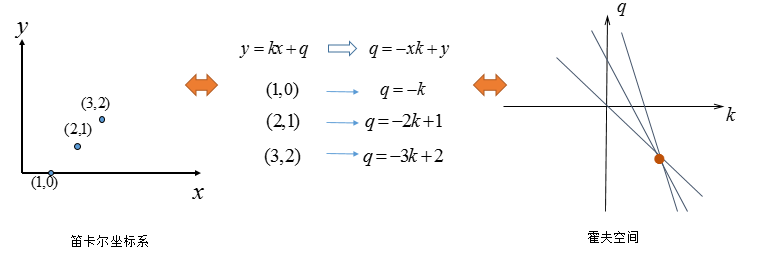
反过来同样成立(霍夫空间的一条直线,对应笛卡尔坐标系的一个点):
再来看看A、B两个点,对应霍夫空间的情形:
一步步来,再看一下三个点共线的情况:
可以看出如果笛卡尔坐标系的点共线,这些点在霍夫空间对应的直线交于一点:这也是必然,共线只有一种取值可能。
如果不止一条直线呢?再看看多个点的情况(有两条直线):
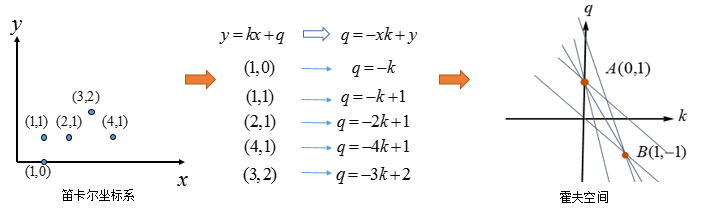
其实(3,2)与(4,1)也可以组成直线,只不过它有两个点确定,而图中A、B两点是由三条直线汇成,这也是霍夫变换的后处理的基本方式:选择由尽可能多直线汇成的点。
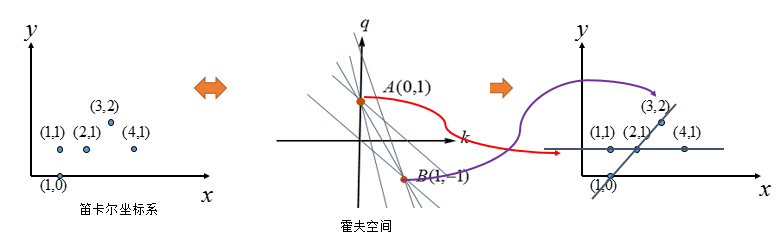
看看,霍夫空间:选择由三条交汇直线确定的点(中间图),对应的笛卡尔坐标系的直线(右图)。
到这里问题似乎解决了,已经完成了霍夫变换的求解,但是如果像下图这种情况呢?

k=∞是不方便表示的,而且q怎么取值呢,这样不是办法。因此考虑将笛卡尔坐标系换为:极坐标表示。
在极坐标系下,其实是一样的:极坐标的点→霍夫空间的直线,只不过霍夫空间不再是[k,q]的参数,而是 的参数,给出对比图:
的参数,给出对比图:
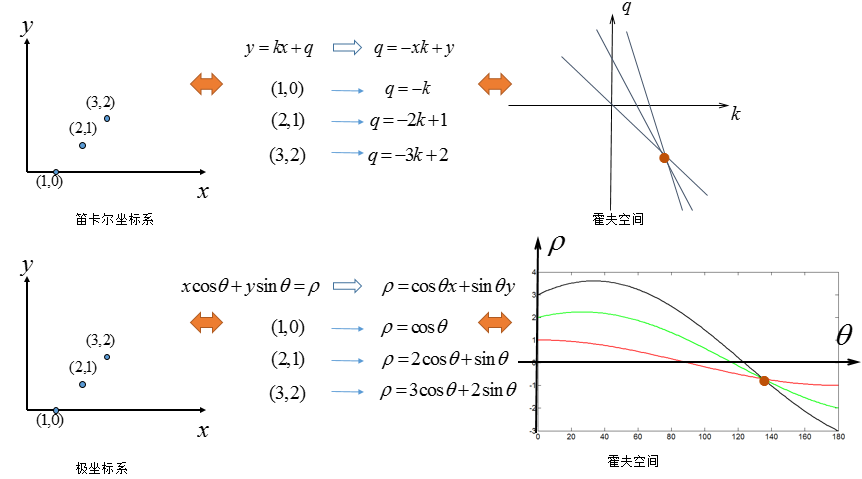
是不是就一目了然了?
给出霍夫变换的算法步骤:
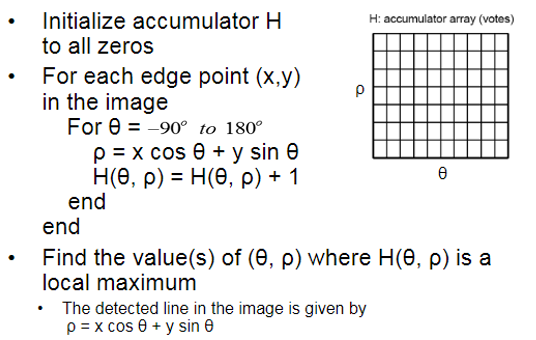
计数过程简易实现如下,我们通过H矩阵记录每一条直线经过的像素点,后续处理实际上已经不算Hough算法的部分了,不予实现了,另外我的H矩阵的行数(即rho的存储部分)设定的非常不严谨,浪费了很多空间,实际实现应考虑优化,确定rho的最小范围,并投影到0~某个正数区间,作为H的行数。
void hough() {
Mat souImg = imread("建筑.png");
imshow("原始图片", souImg);
Mat contour;
Canny(souImg, contour, 50, 200);
imshow("轮廓图片", contour);
int H_row;
if (contour.cols > contour.rows)
H_row = contour.cols;
else
H_row = contour.rows;
Mat H(3*H_row, 180, CV_8S, Scalar(0));
std::cout << H_row << std::endl;
float theta, rho;
for (int i = 0; i < contour.rows; i++) {
for (int j = 0; j < contour.cols; j++) {
if (contour.at<uchar>(i, j) > 0) {
for (theta = 0; theta < 180; ++theta) {
rho = floor(i*cos(theta*CV_PI / 180) + j*sin(theta*CV_PI / 180));
try {
H.at<uchar>(rho + H_row, theta) += 1;
}
catch (...) {
std::cout << i << j << rho << theta << std::endl;
return;
}
}
}
}
}
imshow("H", H);
waitKey(0);
}
1、霍夫变换
霍夫变换接收二值化的输入,即已经进行初步的轮廓检测之后,才进行直线检测;输出一组cv::Vec2f,通常用vector<CV::Vec2f>接收,所以我们通常使用Canny检测之后进行霍夫变换。
输出的两个float数字表示(rho, theta),使用cv::line绘图,因其参数需要的是线段的两个端点,所以我们不得不进行还原操作。
void hough() {
cv::Mat image = cv::imread("road.png");
cv::Mat midImage;
cv::Canny(image, midImage, 50, 200, 3);
std::vector<cv::Vec2f> lines;
cv::HoughLines(midImage, lines, 1, CV_PI / 180, 150); // 输入的时二值图像,输出vector向量
for (size_t i=0; i < lines.size(); i++) {
float rho = lines[i][0]; //就是圆的半径r
float theta = lines[i][1]; //就是直线的角度
cv::Point pt1, pt2;
double a = cos(theta), b = sin(theta);
double x0 = a*rho, y0 = b*rho;
pt1.x = cvRound(x0 + 1000 * (-b));
pt1.y = cvRound(y0 + 1000 * (a));
pt2.x = cvRound(x0 - 1000 * (-b));
pt2.y = cvRound(y0 - 1000 * (a));
cv::line(image, pt1, pt2, cv::Scalar(55, 100, 195), 1); //Scalar函数用于调节线段颜色,就是你想检测到的线段显示的是什么颜色
cv::imshow("边缘检测后的图", midImage);
cv::imshow("最终效果图", image);
}
}
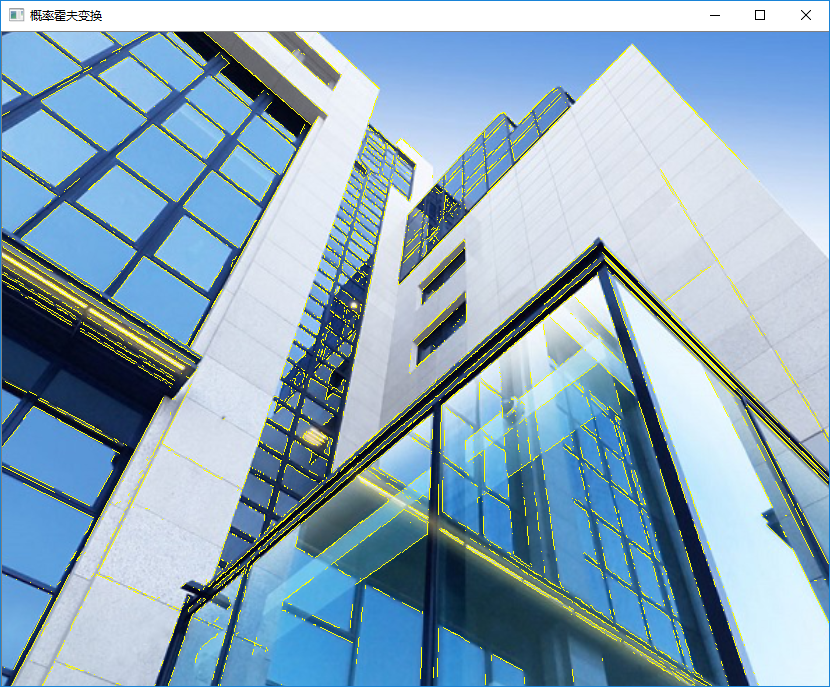
2、概率霍夫变换
概率霍夫变换输出Vec4i,直接输出了每一条线段的首尾,绘图更加方便。它是霍夫变换的改进版,由于算法的改进(会沿着搜寻到的直线扫描图像),可以进一步检测到线段的长度,除了最小投票数(参数五)外,可以额外限制最小线段长度(参数六)和同一线段最大像素间距(参数七)。
void houghp() {
cv::Mat image = cv::imread("road.png");
cv::Mat midImage;
cv::Canny(image, midImage, 50, 200, 3);
std::vector<cv::Vec4i> lines;
cv::HoughLinesP(midImage, lines, 1, CV_PI / 180, 50); // 输入的时二值图像,输出vector向量
for (int i=0; i < lines.size(); i++) {
cv::Point pt1(lines[i][0], lines[i][1]);
cv::Point pt2(lines[i][2], lines[i][3]);
cv::line(image, pt1, pt2, cv::Scalar(0, 255, 255));
}
cv::imshow("概率霍夫变换", image);
}
『OpenCV3』霍夫变换原理及实现的更多相关文章
- 『OpenCV3』滤波器边缘检测
一.原理简介 边缘检测原理 - Sobel, Laplace, Canny算子 X方向Sobel算子 -1 -2 -1 0 0 0 1 2 1 Y方向Sobel算子 -1 0 1 -2 0 2 -1 ...
- 『OpenCV3』基于色彩分割图片
一.遍历图像实现色彩掩码 本节我们实现这样一个算法,我们指定某种颜色和一个阈值,根据输入图片生成一张掩码,标记符合的像素(和指定颜色的差异在阈值容忍内). 源代码如下,我们使用一个class完成这个目 ...
- 『OpenCV3』Harris角点特征_API调用及python手动实现
一.OpenCV接口调用示意 介绍了OpenCV3中提取图像角点特征的函数: # coding=utf- import cv2 import numpy as np '''Harris算法角点特征提取 ...
- 『OpenCV3』滤波器实现及使用滤波器降噪
一.滤波器实现 我们实现这样一个基于拉普拉斯算子的滤波器核心,并使用它进行滤波,这可以做到锐化图像的效果, 0 -1 0 -1 5 -1 0 -1 0 首先我们完全手动的进行滤波,依赖指针操作, vo ...
- 『OpenCV3』Mat简介
Mat属性方法介绍:OpenCV2:Mat属性type,depth,step 推荐一套OpenCV入门博客:OpenCV探索 一.Mat Mat类用于表示一个多维的单通道或者多通道的稠密数组.能够用来 ...
- 『OpenCV3』处理视频&摄像头
在opencv中,摄像头和视频文件并没有很大不同,都是一个可以read的数据源,使用cv2.VideoCapture(path).read()可以获取(flag,当前帧),对于每一帧,使用图片处理函数 ...
- 『OpenCV3』简单图片处理
cv2和numpy深度契合,其图片读入后就是numpy.array,只不过dtype比较不常用而已,支持全部数组方法 数组既图片 import numpy as np import cv2 img = ...
- 『转载』Debussy快速上手(Verdi相似)
『转载』Debussy快速上手(Verdi相似) Debussy 是NOVAS Software, Inc(思源科技)发展的HDL Debug & Analysis tool,这套软体主要不是 ...
- 『TensorFlow』专题汇总
TensorFlow:官方文档 TensorFlow:项目地址 本篇列出文章对于全零新手不太合适,可以尝试TensorFlow入门系列博客,搭配其他资料进行学习. Keras使用tf.Session训 ...
随机推荐
- Centos7.1环境下搭建SVN
环境准备: 系统 配置 IP Centos7.1 1核2G+60GB硬盘 10.10.28.204 1.安装 sudo yum install subversion 查看版本 svnserve –-v ...
- docker+gitlab的安装和迁移
docker+gitlab的安装 docker search gitlab docker pull docker.io/gitlab/gitlab-ce docker run --name=: -- ...
- 【JVM】-NO.113.JVM.1 -【JDK11 HashMap详解-0-全局-put】
Style:Mac Series:Java Since:2018-09-10 End:2018-09-10 Total Hours:1 Degree Of Diffculty:5 Degree Of ...
- spring重要知识点总结
一.面向切面编程 配置applicationContext.xml文件 <beans xmlns="http://www.springframework.org/schema/bean ...
- [LeetCode] 系统刷题4_Binary Tree & Divide and Conquer
参考[LeetCode] questions conlusion_InOrder, PreOrder, PostOrder traversal 可以对binary tree进行遍历. 此处说明Divi ...
- linear-gradient常用实现效果
之前也研究过css3的这个属性,感觉没什么大用,一般的开发不会用到,毕竟调出来的渐变不专业,不如找一个好看的图片,其实很多时候还是有用的,偷来三个例子. 一.控制虚线 一般写虚线都用dashed,但有 ...
- 问题: 揭秘Angualr2 书上问卷调查
npm install 初夏下面问题: 0 info it worked if it ends with ok1 verbose cli [ '/home/linux_ubuntu164/tools/ ...
- Android -- 贝塞尔曲线公式的推导和简单使用
1,最近看了几个不错的自定义view,发现里面都会涉及到贝塞尔曲线知识,深刻的了解到贝塞尔曲线是进阶自定义view的一座大山,so,今天先和大家来了解了解. 2,贝塞尔曲线作用十分广泛,简单举几个的栗 ...
- Android-Gradle(二)
理解Gradle脚本 当然我们现在讨论的所有内容都是基于Android studio的,所以请先行下载相关工具.当我们创建一个新的工程,Android studio会默认为我们创建三个gradle文件 ...
- Java try和catch的使用介绍
尽管由Java运行时系统提供的默认异常处理程序对于调试是很有用的,但通常你希望自己处理异常.这样做有两个好处.第一,它允许你修正错误.第二,它防止程序自动终止.大多数用户对于在程序终止运行和在无论何时 ...