32、从零开始写CMOS摄像头驱动
使用的内核:linux-3.4.2
参考源码:
第32课_新内核下的I2C驱动\i2c\1th_i2c_new_device
第2课第1.1.7节文档和图片(从0写USB摄像头)\myuvc
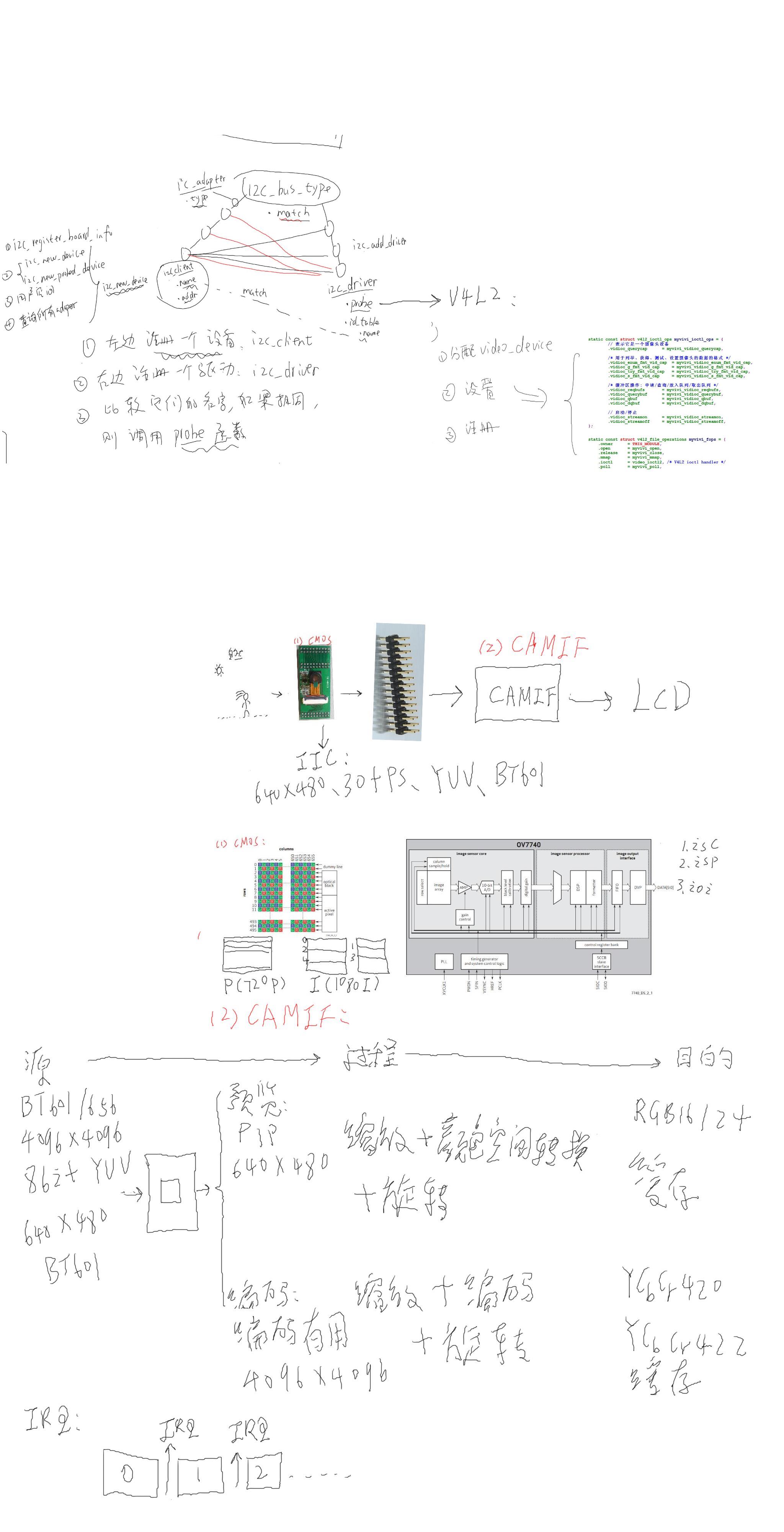
设备地址:
写 -- 0x42(01000010)
读 -- 0x43(01000011)
8bit的地址 = 7bit设备地址 + 1bit的读/写控制位
设备地址 = 0100001 = 0x21
问:为什么需要复位摄像头模块?
答:IIC能够正常操作CMOS摄像头模块内部的寄存器的前提是:
-- 提供符合它需求的系统时钟(CAMCLK)
-- 需要给它一个复位信号
问:怎样才能复位摄像头模块?
答:通过操作CAMIF控制器中相应的寄存器,让CAMRST发出复位
信号,从而复位摄像头模块,具体操作见驱动源码。
举例:说明CIPRCTRL寄存器
48字节(DMA需要传输的长度) = 10字节(DMA一次能传输的最大长度(Main burst length)) + 10字节 + 10字节 + 10字节 + 8字节(remain burst length)
burst length必须是2/4/8/16,不管是Main burst length或者remain burst length,计算方法见代码,计算的变量是使用一行有多少字在计算
/*
CIPRSCPRERATIO:
bit[31:28]: 预览缩放的变化系数(SHfactor_Pr)
bit[22:16]: 预览缩放的水平比(PreHorRatio_Pr)
bit[6:0]: 预览缩放的垂直比(PreVerRatio_Pr)
CIPRSCPREDST:
bit[27:16]: 预览缩放的目标宽度(PreDstWidth_Pr)
bit[11:0]: 预览缩放的目标高度(PreDstHeight_Pr)
CIPRSCCTRL:
bit[29:28]: 告诉摄像头控制器(图片是缩小、放大)(ScaleUpDown_Pr)
bit[24:16]: 预览主缩放的水平比(MainHorRatio_Pr)
bit[8:0]: 预览主缩放的垂直比(MainVerRatio_Pr)
bit[31]: 必须固定设置为1
bit[30]: 设置图像输出格式是RGB16、RGB24
bit[15]: 预览缩放开始
*/
cmos_ov7740_calculate_scaler_info();缩放函数的具体计算方法可以见s3c2440手册Figure23-12图的下面
驱动测试条件:
1.
要有IIC总线驱动;
要有LCD驱动;
2.
要配置上V4L2相关选项
Device Drivers --->
<*> Multimedia support --->
<*> Video For Linux
[*] Video capture adapters (NEW) --->
[*] V4L USB devices (NEW) --->
[*] V4L platform devices --->
32、从零开始写CMOS摄像头驱动的更多相关文章
- 29、从零写USB摄像头驱动之通过urb接受数据后上报数据是函数中fid的作用
原因分析如下: 视频数据是由一帧一帧数据组成,为了防止数据错乱,会给每一帧数据分配一个frameid,从第0帧开始,接着是第1帧,接着又是第0帧这样交错进行的,对usb摄像头来说每一帧数据来源于多个包 ...
- Linux摄像头驱动学习之:(三)从零写虚拟驱动(仿照vivi.c)
本篇仿照vivi.c 写虚拟视频驱动,代码(myvivi.c+fillbuf.c+Makefile)如下: //==========================myvivi.c========== ...
- Linux USB摄像头驱动【转】
本文转载自:http://www.itdadao.com/articles/c15a509940p0.html 在 cortex-a8 中,可接入摄像头的接口通常可以分为两种, CAMERA 接口和 ...
- Linux USB 摄像头驱动
在 cortex-a8 中,可接入摄像头的接口通常可以分为两种, CAMERA 接口和 USB 接口的摄像头.这一章主要是介绍 USB 摄像头的设备驱动程序.在我们印象中,驱动程序都是一个萝卜一个坑, ...
- V4L2(二)虚拟摄像头驱动vivi深入分析【转】
转自:http://www.cnblogs.com/tureno/articles/6694463.html 转载于: http://blog.csdn.net/lizuobin2/article/d ...
- 31、CMOS摄像头说明
ov7740(摄像头模块) 输入信号: 自然景观等的模拟信号输出信号: RGB.YUV格式的数字信号 1). 常用参数输入信号: 自然景观等的模拟信号输出信号: 输出格式为:RAW RGB.YUV输出 ...
- 2018-10-20-C#-从零开始写-SharpDx-应用-初始化dx修改颜色
title author date CreateTime categories C# 从零开始写 SharpDx 应用 初始化dx修改颜色 lindexi 2018-10-20 17:34:37 +0 ...
- C# 从零开始写 SharpDx 应用 初始化dx修改颜色
原文:C# 从零开始写 SharpDx 应用 初始化dx修改颜色 版权声明:博客已迁移到 https://blog.lindexi.com 欢迎访问.如果当前博客图片看不到,请到 https://bl ...
- 荣品RP4412开发板摄像头驱动调用及对焦控制
1.关于更换不同摄像头驱动调用问题. 问:RP4412开发板,我用的摄像头640*480图像预览时OK的,但是我调用1280*720的初始化预览,摄像头没有图像了,是不是camera程序也需要修改? ...
随机推荐
- java判断编码格式
package com.sssjd.storm; import java.io.UnsupportedEncodingException; /** * Created by jorda on 2017 ...
- tortoisegit--无法commit
tortoisegit--无法提交,好几次使用tortoisegit,commit的时候出现卡死的情况,导致无法提交代码. 分析错误以为是: 电脑的性功能有关,但重启好几次电脑一人无济于事,打开任务管 ...
- 欧拉回路&欧拉路径学习笔记
基础性质(用来判定): 1.无向图欧拉回路没有奇数点 (有向图所有点入度等于出度) 2.无向图欧拉路径只有两个奇数点 (有向图有一个顶点入度比出度大1,有一个顶点出度比入度大1,其他的全相等) 3.图 ...
- exit---退出目前的shell
exit命令 exit命令同于退出shell,并返回给定值.在shell脚本中可以终止当前脚本执行.执行exit可使shell以指定的状态值退出.若不设置状态值参数,则shell以预设值退出.状态 ...
- Modbus设备调试工具Winform(包括SRC0001、海康威视、TTS以及各种类型LED的测试)
1.SRC寄存器读写测试 2.采集数据终端模块(这里是康海时代)调试 3.RS485传感器设备调试 4.LED/TTS/海康威视等展示设备调试 5.Modbus等协议规约资料及4-20mA设备调试 以 ...
- [TypeScript] Shallow copy object by using spread opreator
For example we have an object: const todo = { text: "Water the flowers", completed: false, ...
- thinkphp验证码(总结之后,效率非常好)
thinkphp验证码(总结之后,效率非常好) 一.总结 1.总结:总结之后,效率非常好,复习的时候也才方便,也能深入到细处,非常方便建立熟悉感和突破使用困境 2.验证码使用中文集或者繁体集设置:这个 ...
- app 自动化测试 Appium+python可以运行的代码
Appium
- 洛谷 P1497 木牛流马
P1497 木牛流马 题目描述 孔明造出了木牛流马 木牛者,方腹曲头,一脚四足,头入领中,舌著于腹.载多而行少,宜可大用,不可小使:特行者数十里,群行者二十里也.曲者为牛头,双者为牛脚,横者为牛领,转 ...
- 三个水杯(BFS)
三个水杯 时间限制:1000 ms | 内存限制:65535 KB 难度:4 描写叙述 给出三个水杯.大小不一,而且仅仅有最大的水杯的水是装满的,其余两个为空杯子. 三个水杯之间相互倒水,而且水杯 ...