ROS-导航功能-RVIZ
前言:slam使用激光雷达完成了地图构建,现在介绍一下自主导航。move_base用于实现最优路径规划,amcl用于实现机器人定位。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、安装导航包
sudo apt-get install ros-kinetic-navigation
二、启动模型文件
cd ~/catkin_ws/src/robot_mrobot/mrobot_bringup/launch roslaunch fake_mrobot_with_laser.launch
----------------------------
如果出现如下错误:
ERROR: cannot launch node of type [arbotix_python/arbotix_driver]: arbotix_python
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/cdq/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
则是因为没有安装 arbotix 这个相关的软件包集,解决方式:
sudo apt-get install ros-kinetic-arbotix*
三、启动导航文件
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch fake_nav_demo.launch
-----------------------------
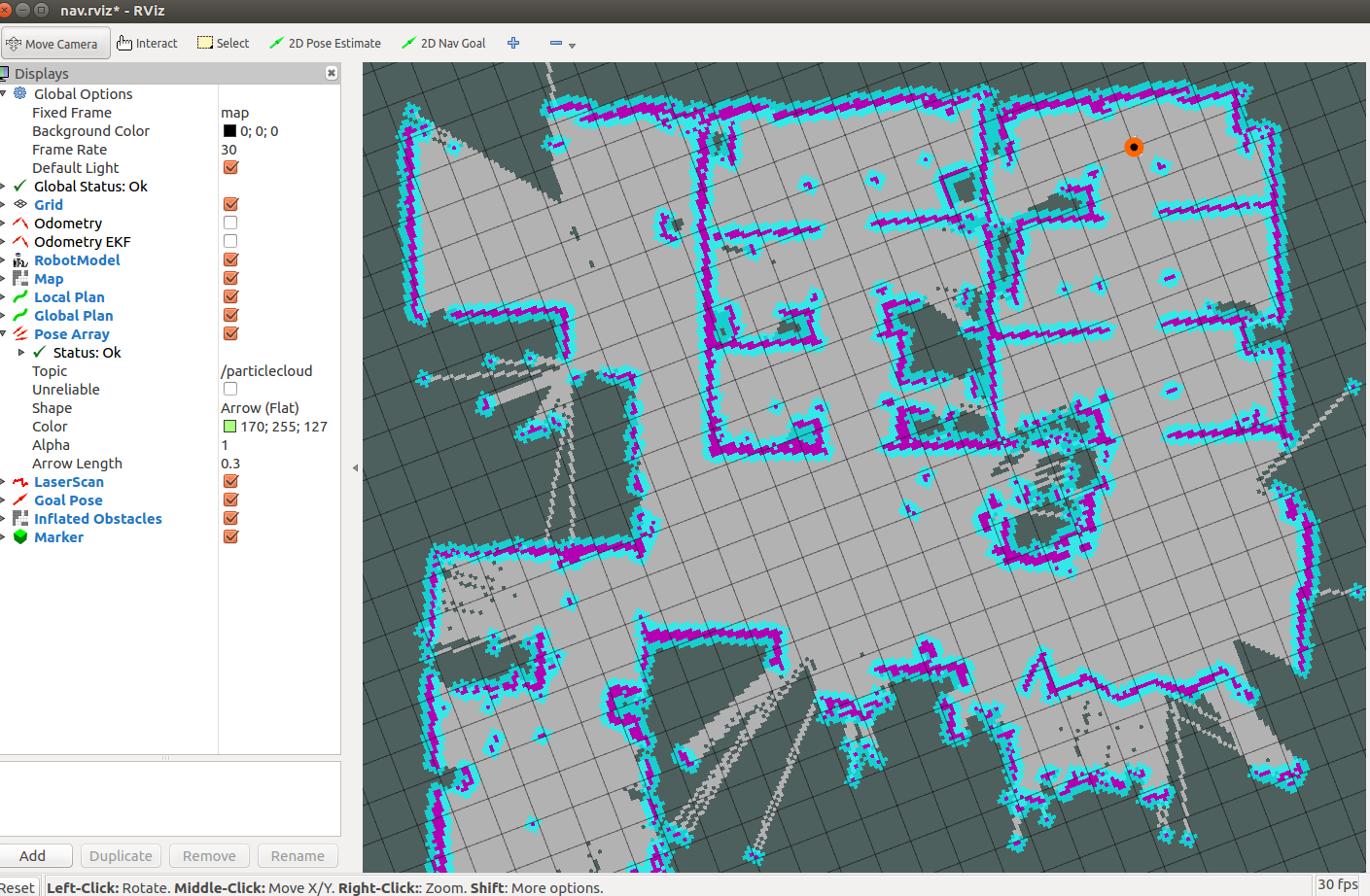
显示如下:
四、手动导航
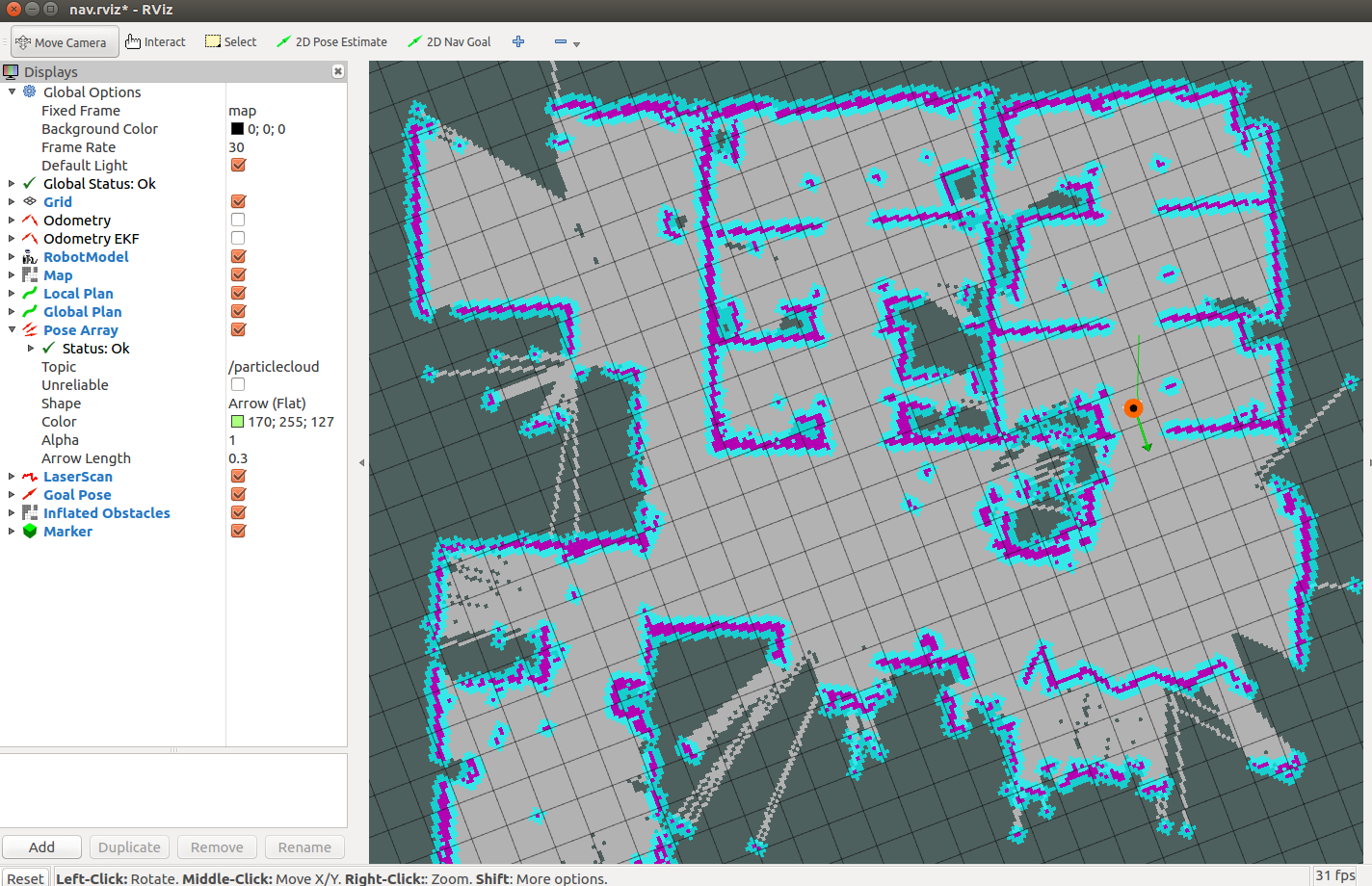
在rviz界面点击“2D Nav Goal”按钮,这个按钮用于设置导航的目标点;
鼠标左键点击目标点不要松开,选择方向后再松开;
然后机器人就会自动规划路径并导航了。
五、自动导航
启动自动导航
rosrun mrobot_navigation random_navigation.py
-------------------------------
如果出现报错:
[rosrun] Couldn't find executable named random_navigation.py below /home/cdq/catkin_ws/src/robot_mrobot/mrobot_navigation
这是因为没有权限,解决方式:
cd /home/cdq/catkin_ws/src/robot_mrobot/mrobot_navigation/scripts chmod +x random_navigation.py
然后再运行命令就可以了。
-----------------------------
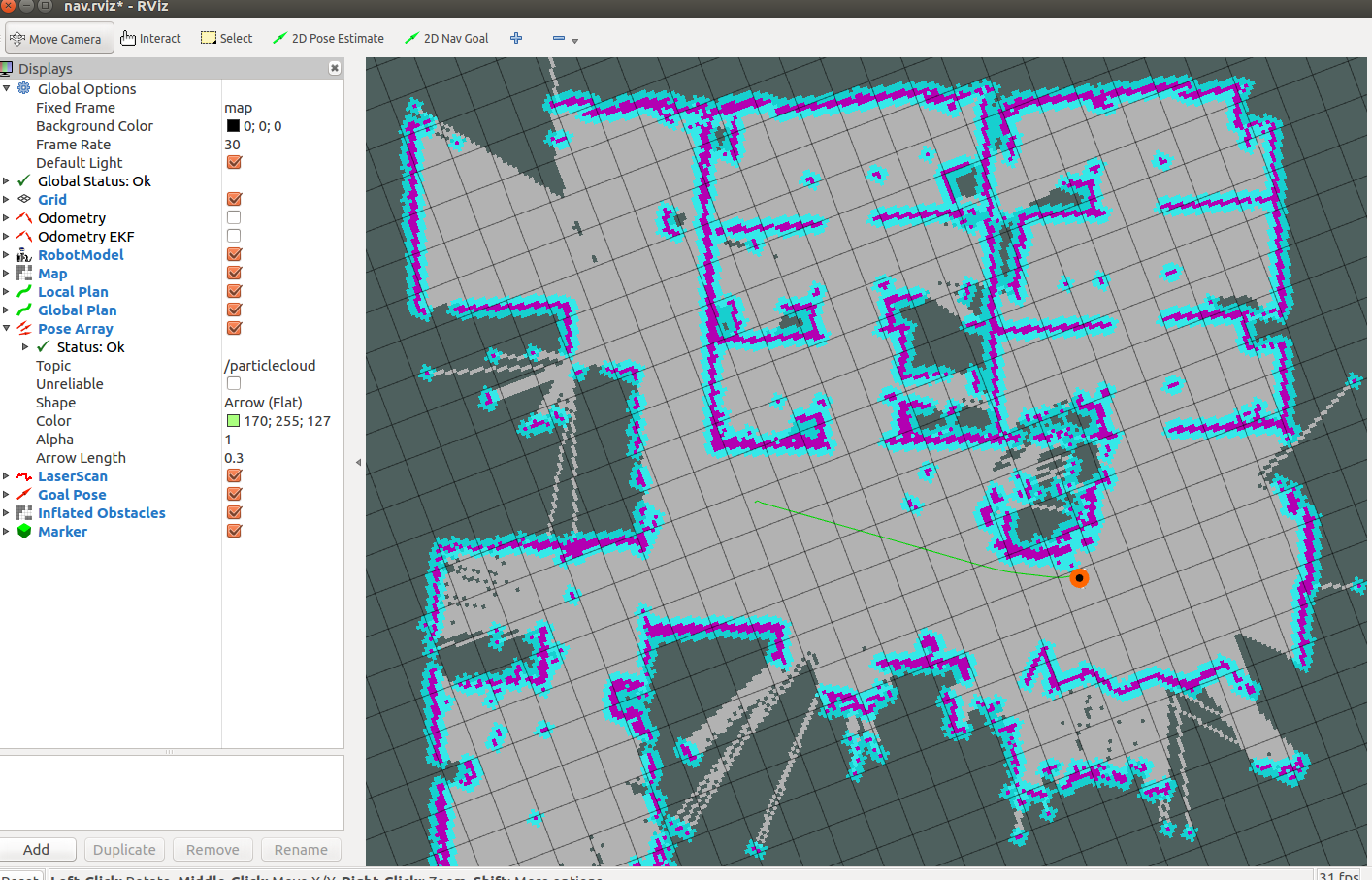
随机导航效果如下:
六、查看信息
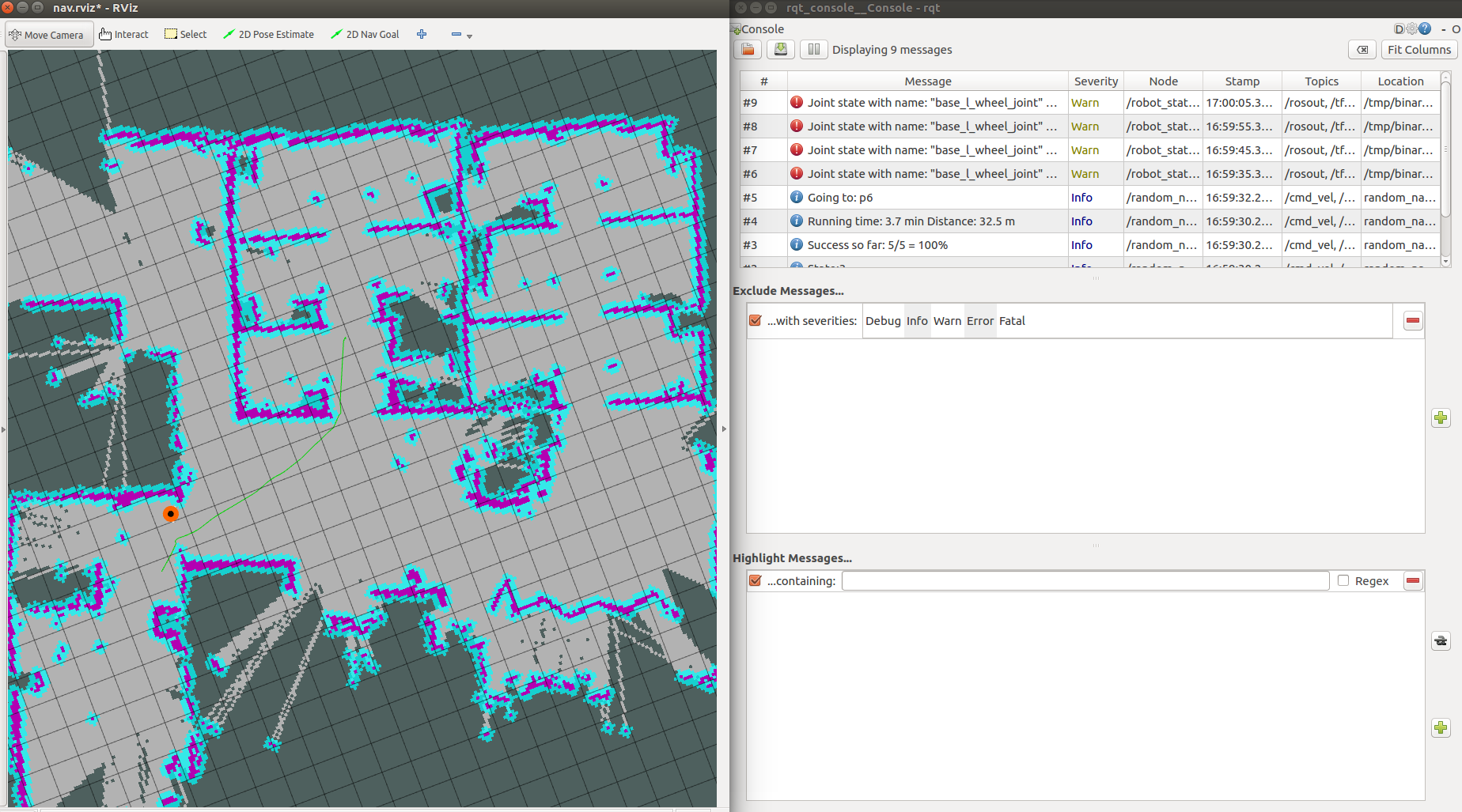
打开日志监控的可视化终端,可以看到机器人发布的距离信息、状态信息、目标点编号、成功率和速度等日志。
rqt_console
---------------------------------
效果如下:
-END-
ROS-导航功能-RVIZ的更多相关文章
- ros 运行rviz时出现 QXcbConnection: XCB error: 148 错误 解决方法
出现上述问题的原因: 1.由于使用了nvc远程控制下位机: 2.rviz是一个基于opengl开发的图形插件,需要使用理论的屏幕参数(thetis' screen),由于使用了teamviewer会导 ...
- (九)ROS安装rviz模拟器
一 . 什么是 rviz rviz : The ROS Visualization Tool ,即机器人操作系统3D可视化工具.它的作用就是:一个虚拟世界,用来模拟机器人在现实世界的运行效果. 简单的 ...
- ROS在rviz中实时显示轨迹(nav_msgs/Path消息的使用)
消息结构说明nav_msgs/Path.msg结构#An array of poses that represents a Path for a robot to followHeader heade ...
- ROS学习--RViz使用的要点
1.RViz文件保存,下次面板打开时,默认展示上一次的配置 2.设置Fixed_Frame很重要,一打开默认配置,就要确认这个参数是否正确配置,不然会出现:激光数据不展示.点pose_initial时 ...
- ROS示例----导航功能包Husky_exploration
ROS导航功能包示例husky amcl gmapping slam exploration 此功能包包含如下文件: 结构如下: $ tree -L 2 . ├── CMakeLists.txt -& ...
- ROS进阶学习手记 7 -- RViz仿真实例1
[任务2]: 用simulator: RViz 工具,完成对小车的建模,名字drive RViz = dvrv, 用 dvrv_node 发布topic和数据格式,向它发送位置指令,使它能接受 ...
- ROS数据可视化工具Rviz和三维物理引擎机器人仿真工具V-rep Morse Gazebo Webots USARSimRos等概述
ROS数据可视化工具Rviz和三维物理引擎机器人仿真工具V-rep Morse Gazebo Webots USARSimRos等概述 Rviz Rviz是ROS数据可视化工具,可以将类似字符串文本等 ...
- ros机器人开发概述
1. ROS项目开发流程? 参照古月大神写的ROS探索总结系列:http://blog.exbot.net/archives/619 具体项目设计可看看<程序员>杂志的最新一篇 ...
- (一)ROS系统入门 Getting Started with ROS 以Kinetic为主更新 附课件PPT
ROS机器人程序设计(原书第2版)补充资料 教案1 ROS Kinetic系统入门 ROS Kinetic在Ubuntu 16.04.01 安装可参考:http://blog.csdn.net/zha ...
- ROS机器人程序设计(原书第2版)补充资料 教学大纲
ROS机器人程序设计(原书第2版) 补充资料 教学大纲 针对该书稍后会补充教学大纲.教案.多媒体课件以及练习题等. <ROS机器人程序设计>课程简介 课程编号:XXXXXX 课程名称:RO ...
随机推荐
- (转)19 个 JavaScript 有用的简写技术
1.三元操作符 当想写if...else语句时,使用三元操作符来代替. const x = 20; let answer; if (x > 10) { answer = 'is greater' ...
- 搞不懂的算法-排序篇<1>
最近在学习算法,跟着<Algorithms>这本书,可能是自己水平不够吧,看完排序算法后各种,希尔,归并,快排,堆的实现在脑子里乱成一锅粥,所以就打算大概总结一下,不求精确,全面,只想用平 ...
- js 正则 测试
var str0 = '2013-6-7()'; var AAAAADD = str0.match(/(\d)/g); //11个空字符串 //["2", "0" ...
- 数据分析例子-------CTR1
1.CTR: (1)几个概念: impression(展示):用户看到该广告的次数.也就是一个广告被显示了多少次,它就计数多少.比如:打开网站的一个页面,网站上的所有广告就被显示了一次,每个广告增加1 ...
- SendKeys发送组合键
使用: using System.Windows.Forms;//添加命名空间引用 { SendKeys.SendWait("{DOWN}"); ppt.ppt_sendkey(& ...
- JAVA基础知识复习小结
集合 Set集合 Set集合的基本特征是元素不允许重复.HashSet不保存元素顺序,LinkedHashSet用链表保持元素的插入顺序,TreeSet可定制排序规则. HashSet的底层是用Has ...
- 《黑白团团队》第八次团队作业:Alpha冲刺 第五天
项目 内容 作业课程地址 任课教师首页链接 作业要求 团队项目 填写团队名称 黑白团团队 填写具体目标 认真负责,完成项目 团队项目Github仓库地址链接. 第五天 日期:2019/6/19 成员 ...
- 使用IDEA 中 实现springboot 热部署 (spring boot devtools版)
第一步:添加springboot的配置文件 首先我先贴出我的配置 添加依赖包 <!-- spring boot devtools 依赖包. --> <dependency> & ...
- Maven Hibernate
1.使用maven管理Hibernate实现自动装配jar包 2.需要在配置文件pom.xml中引入 如:引入hibaernate5.2.11.Final版本的jar包,需要做如下配置: <!- ...
- 计算机网络系统--Microsoft Lync 与 腾讯通RTX 对比(转载)
原文网址: http://it.vsharing.com/226.html ------------------------------- 上海大学统一通信平台现在尚未实施,一直在测试微软的Lync. ...