ROS-导航功能-RVIZ
前言:slam使用激光雷达完成了地图构建,现在介绍一下自主导航。move_base用于实现最优路径规划,amcl用于实现机器人定位。
前提:已下载并编译了相关功能包集,如还未下载,可通过git下载:https://github.com/huchunxu/ros_exploring.git
一、安装导航包
sudo apt-get install ros-kinetic-navigation
二、启动模型文件
cd ~/catkin_ws/src/robot_mrobot/mrobot_bringup/launch roslaunch fake_mrobot_with_laser.launch
----------------------------
如果出现如下错误:
ERROR: cannot launch node of type [arbotix_python/arbotix_driver]: arbotix_python
ROS path [0]=/opt/ros/kinetic/share/ros
ROS path [1]=/home/cdq/catkin_ws/src
ROS path [2]=/opt/ros/kinetic/share
则是因为没有安装 arbotix 这个相关的软件包集,解决方式:
sudo apt-get install ros-kinetic-arbotix*
三、启动导航文件
cd ~/catkin_ws/src/robot_mrobot/mrobot_navigation/launch roslaunch fake_nav_demo.launch
-----------------------------
显示如下:
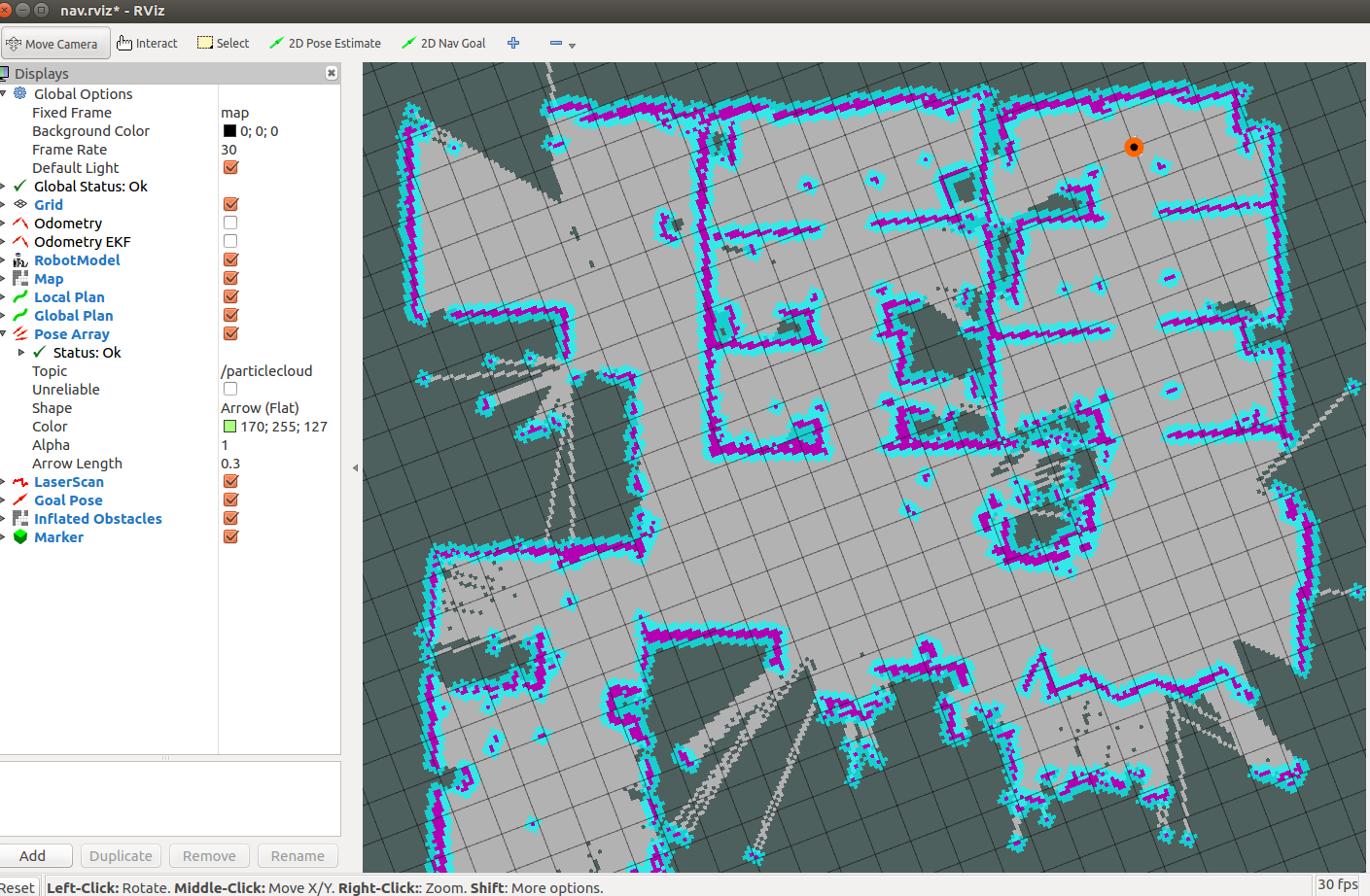
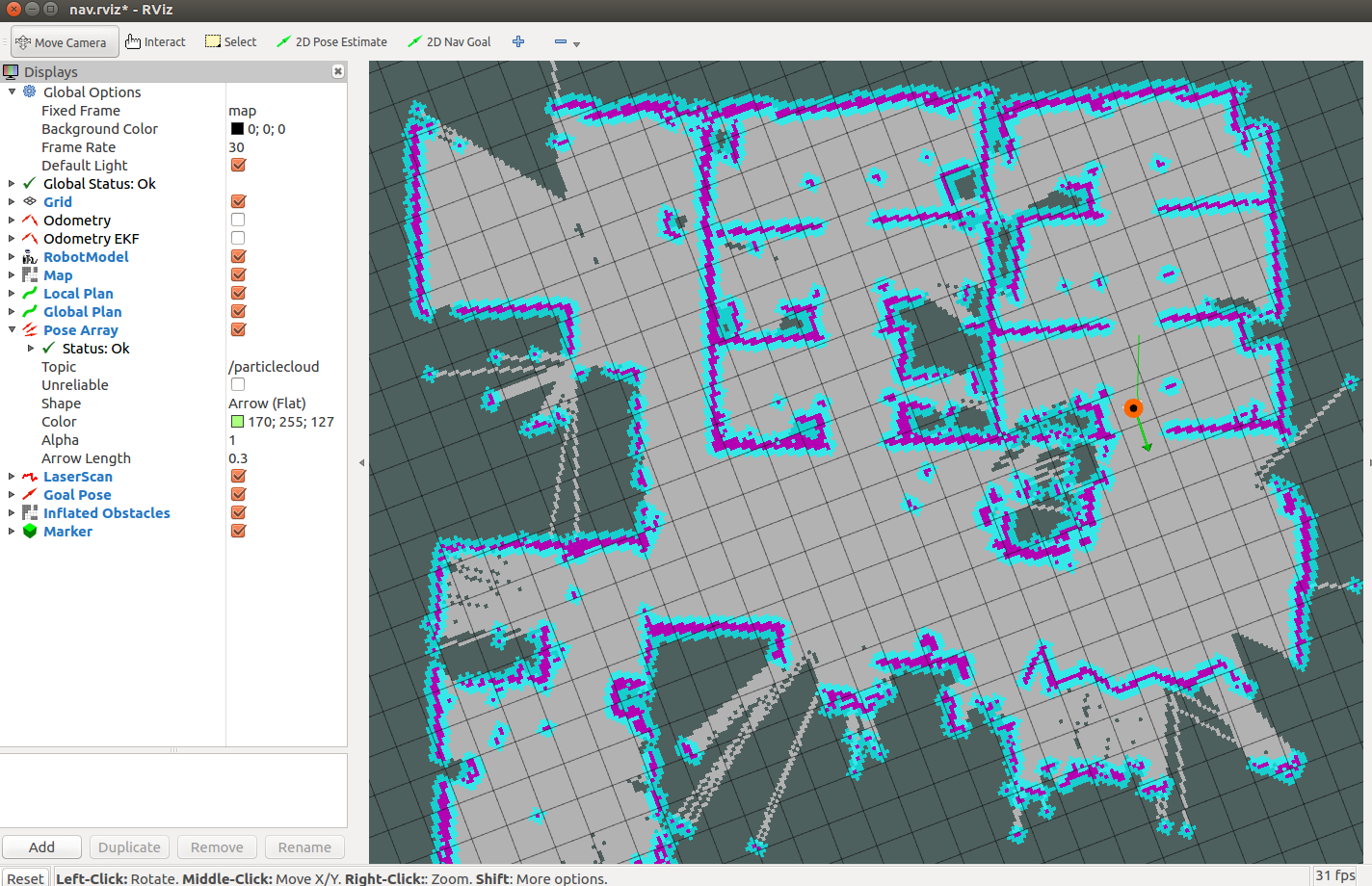
四、手动导航
在rviz界面点击“2D Nav Goal”按钮,这个按钮用于设置导航的目标点;
鼠标左键点击目标点不要松开,选择方向后再松开;
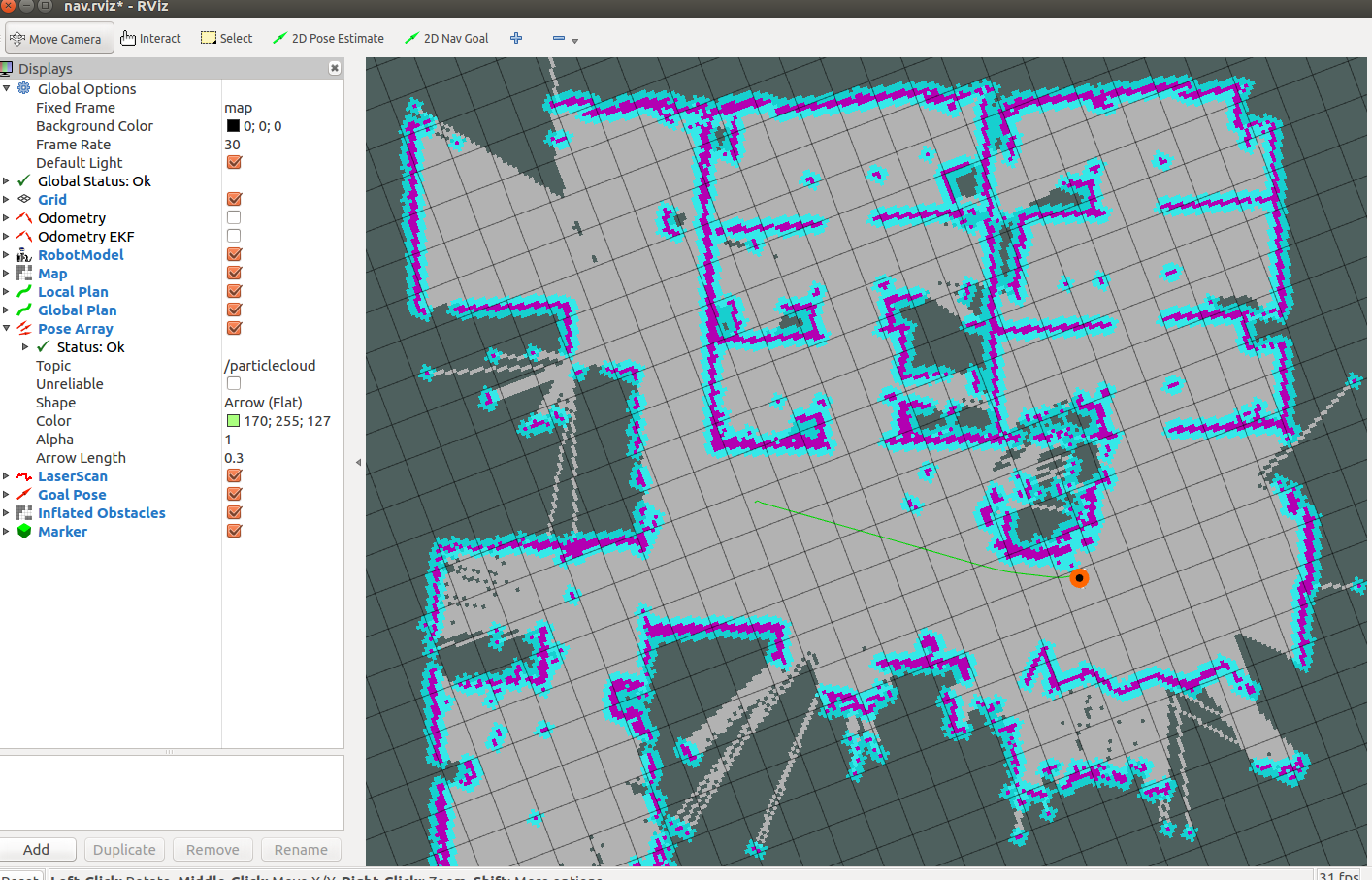
然后机器人就会自动规划路径并导航了。
五、自动导航
启动自动导航
rosrun mrobot_navigation random_navigation.py
-------------------------------
如果出现报错:
[rosrun] Couldn't find executable named random_navigation.py below /home/cdq/catkin_ws/src/robot_mrobot/mrobot_navigation
这是因为没有权限,解决方式:
cd /home/cdq/catkin_ws/src/robot_mrobot/mrobot_navigation/scripts chmod +x random_navigation.py
然后再运行命令就可以了。
-----------------------------
随机导航效果如下:
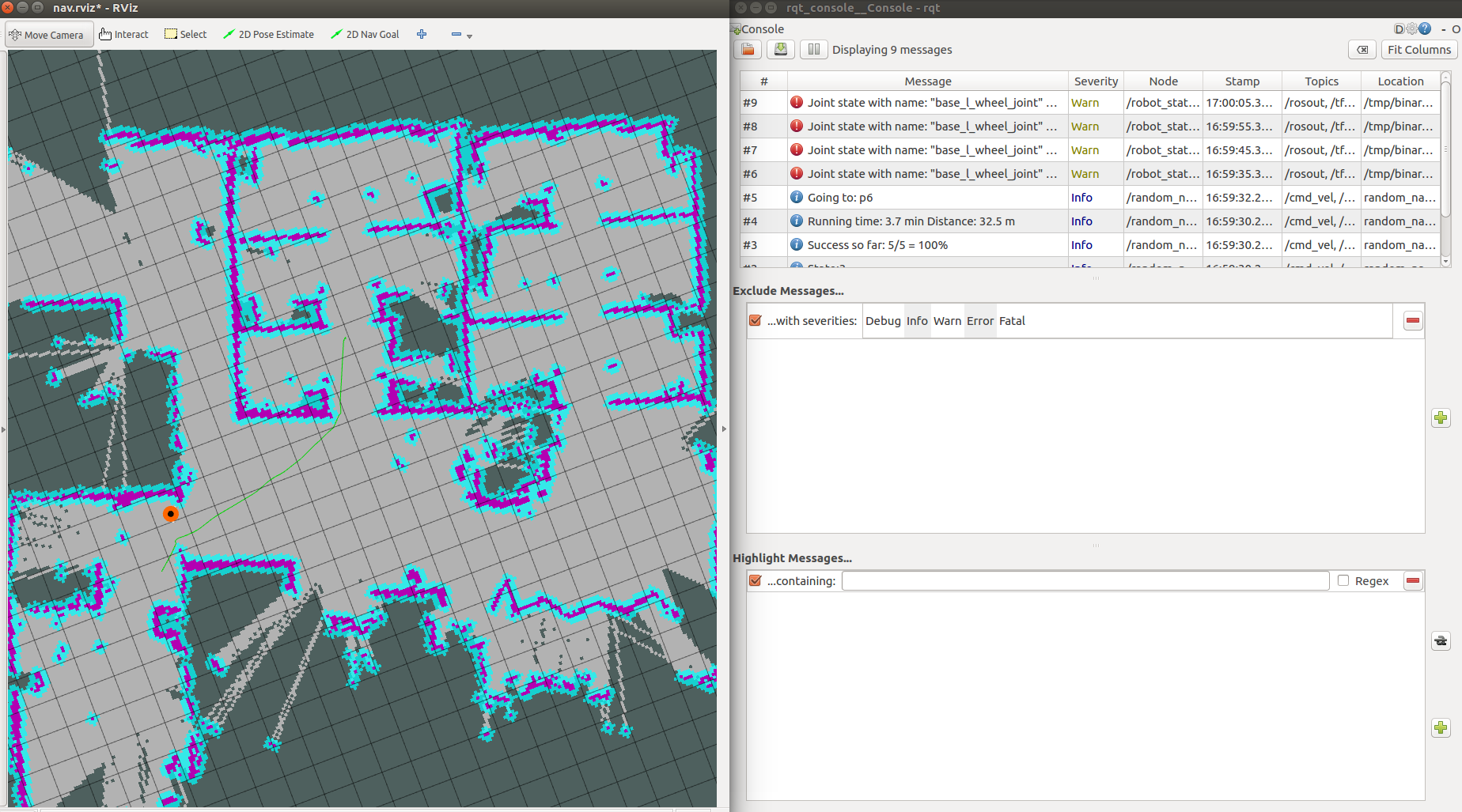
六、查看信息
打开日志监控的可视化终端,可以看到机器人发布的距离信息、状态信息、目标点编号、成功率和速度等日志。
rqt_console
---------------------------------
效果如下:
-END-
ROS-导航功能-RVIZ的更多相关文章
- ros 运行rviz时出现 QXcbConnection: XCB error: 148 错误 解决方法
出现上述问题的原因: 1.由于使用了nvc远程控制下位机: 2.rviz是一个基于opengl开发的图形插件,需要使用理论的屏幕参数(thetis' screen),由于使用了teamviewer会导 ...
- (九)ROS安装rviz模拟器
一 . 什么是 rviz rviz : The ROS Visualization Tool ,即机器人操作系统3D可视化工具.它的作用就是:一个虚拟世界,用来模拟机器人在现实世界的运行效果. 简单的 ...
- ROS在rviz中实时显示轨迹(nav_msgs/Path消息的使用)
消息结构说明nav_msgs/Path.msg结构#An array of poses that represents a Path for a robot to followHeader heade ...
- ROS学习--RViz使用的要点
1.RViz文件保存,下次面板打开时,默认展示上一次的配置 2.设置Fixed_Frame很重要,一打开默认配置,就要确认这个参数是否正确配置,不然会出现:激光数据不展示.点pose_initial时 ...
- ROS示例----导航功能包Husky_exploration
ROS导航功能包示例husky amcl gmapping slam exploration 此功能包包含如下文件: 结构如下: $ tree -L 2 . ├── CMakeLists.txt -& ...
- ROS进阶学习手记 7 -- RViz仿真实例1
[任务2]: 用simulator: RViz 工具,完成对小车的建模,名字drive RViz = dvrv, 用 dvrv_node 发布topic和数据格式,向它发送位置指令,使它能接受 ...
- ROS数据可视化工具Rviz和三维物理引擎机器人仿真工具V-rep Morse Gazebo Webots USARSimRos等概述
ROS数据可视化工具Rviz和三维物理引擎机器人仿真工具V-rep Morse Gazebo Webots USARSimRos等概述 Rviz Rviz是ROS数据可视化工具,可以将类似字符串文本等 ...
- ros机器人开发概述
1. ROS项目开发流程? 参照古月大神写的ROS探索总结系列:http://blog.exbot.net/archives/619 具体项目设计可看看<程序员>杂志的最新一篇 ...
- (一)ROS系统入门 Getting Started with ROS 以Kinetic为主更新 附课件PPT
ROS机器人程序设计(原书第2版)补充资料 教案1 ROS Kinetic系统入门 ROS Kinetic在Ubuntu 16.04.01 安装可参考:http://blog.csdn.net/zha ...
- ROS机器人程序设计(原书第2版)补充资料 教学大纲
ROS机器人程序设计(原书第2版) 补充资料 教学大纲 针对该书稍后会补充教学大纲.教案.多媒体课件以及练习题等. <ROS机器人程序设计>课程简介 课程编号:XXXXXX 课程名称:RO ...
随机推荐
- BZOJ1096: [ZJOI2007]仓库建设(dp+斜率优化)
Time Limit: 10 Sec Memory Limit: 162 MBSubmit: 5790 Solved: 2597[Submit][Status][Discuss] Descript ...
- 【Oracle】搭建DG(DataGuard)
操作系统:OEL 5.6 Oracle 版本:11.2.0.4.0 DataGuard规划说明 DATABASE_ROLE DB_NAME IPADDR Primary lgr 192.168.10. ...
- 实践:使用FLANN.LSH进行检索
1.Survey: FLANN 库详情见:http://en.wikipedia.org/wiki/Flann http://medievalscotland.org/kmo/AnnalsIndex/ ...
- auto_ftp_sh
#!/usr/bin/env python # -*- coding:utf-8 -*- import paramiko import time mydate = time.strftime( ...
- Linux系统编程博客参考
通过看前人的博客更易于把握知识要点 http://www.cnblogs.com/mickole/category/496206.html <Linux系统编程> http://www.c ...
- Django 了解
Django是一个开放源代码的Web应用框架 Django也是一个基于 MVC 构造的框架. 但是在Django中,控制器接受用户输入的部分由框架自行处理,所以 Django 里更关注的是模型(Mod ...
- python爬虫简单架构原理及示例
网页下载器示例: # coding:utf-8 import urllib2 import cookielib url = "http://www.baidu.com" print ...
- 洛谷P2827 蚯蚓 队列 + 观察
我们不难发现先被切开的两半一定比后被切开的两半大,这样就天然的生成了队列的单调性,就可以省去一个log.所以,我们开三个队列,分别为origin,big,smallorigin, big, small ...
- SpringBoot事务注解详解
@Transactional spring 事务注解 1.简单开启事务管理 @EnableTransactionManagement // 启注解事务管理,等同于xml配置方式的 <tx:ann ...
- nginx视频服务缓存方案设置指导
本文描述了如何通过设置nginx缓存达到降低服务器后端压力的效果以及结合nginx第三方插件ngx_cache_purge实现nginx缓存后的自动清理功能.具体实施步骤如下所示:第一步:获取清除清除 ...