I2C裸机驱动程序设计
① I2C(Inter-Integrated Circuit)总线是由飞利浦公司开发的两线式串行总线,用于连接微控制器及其外围设备

② I2C总线有两根双向信号线
(1)SDA:Serial Data Line(数据线)
(2)SCL:Serial CLock Line(时钟线)
③ I2C总线寻址
(1)I2C总线协议规定,从设备采用7位的地址。
* D7~D0:从设备地址
* D0位:数据的传送方向。“0”表示主设备向从设备写数据;“1”表示主设备由从设备读数据
注:主设备发送地址时,总线上的每个从设备都将这7位地址与自己的地址进行比较,如果相同,则认为是自己正被主设备寻址,根据R/W位将自己确定为发送器或者接收器
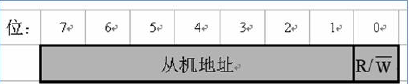
(2)从设备的地址由固定部分和用户自定义部分组成。
* 固定部分:D7-D4 共4位。这是由从设备的生产厂商生产时就已确定的值。
* 用户自定义部分:D3-D1 共3位。这3位通常对应设备的3个引脚(A0~A2)。把3个引脚接到不同的电平上,就可以形成一个3位的数值。
④ I2C总线时序
(1)空闲状态:I2C总线总线的SDA和SCL两条信号线同时处于高电平时,规定为总线的空闲状态。
(2)起始状态:在时钟线SCL保持高电平期间,数据线SDA上的电平被拉低(即负跳变),定义为I2C总线总线的启动信号,它标志着一次数据传输的开始
(3)结束状态:在时钟线SCL保持高电平时,数据线SDA被释放,使得SDA返回高电平(即正跳变),称为I2C总线的停止信号
(4)数据传送:I2C总线上的所有数据(地址和数据)都是以8位一个字节为单位传送的
(5)应答位:发送器每发送一个字节,就在时钟脉冲第9位释放数据线,由接收器反馈一个应答信号。应答信号为低电平时,定为有效应答位ACK,表示接收器已经成功地接收了该字节;应答信号为高电平时,定为非应答位(NACK),表示接收器没有成功接收该字节
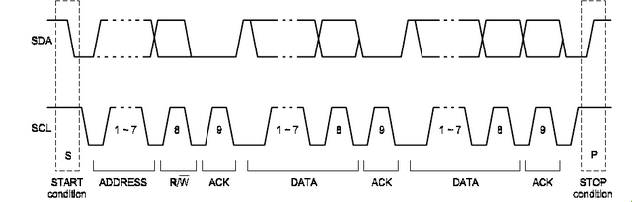
注:I2C接口会在SCL为高电平期间对SDA状态进行采样,所以SDA高低位的变换应该在SCL是低电平期间完成。所以SDA的高电平脉冲要要比SCL略宽。
⑤ 基于S3C2440的I2C裸机代码:
#include "GlobalDefine.h"
#include "Error.h"
#include "Common.h"
#include "I2c.h" #include "ModManager.h"
#include "../Protocol/inc/I2cProtocol.h" #define INTPND (*(volatile unsigned long*)0x4a000010)
#define SRCPND (*(volatile unsigned long*)0x4a000000)
#define INTMSK (*(volatile unsigned long*)0x4a000008)
#define GPECON (*(volatile unsigned long*)0x56000040)
#define GPEUP (*(volatile unsigned long*)0x56000048) #define IICCON (*(volatile unsigned char*)0x54000000)
#define IICSTAT (*(volatile unsigned char*)0x54000004)
#define IICDS (*(volatile unsigned char*)0x5400000C) #define SLAVE_WRITE_ADDR 0xa0
#define SLAVE_READ_ADDR 0xa1 static void I2cDelay(int i)
{
int j = ;
while (i--)
{
for (j = ; j < ; j++)
{
;
}
}
} static void I2cInit()
{
//1 Interrupt Initialize
INTPND |= ( << );
SRCPND |= ( << );
INTMSK &= ~( << ); IICCON |= ( << ); //2 Set I2C-Bus transmit clock
IICCON &= ~( << );
IICCON &= ~(0xf << );
IICCON |= (0x5 << ); //3. Set IIC-bus data output enable
IICSTAT |= ( << ); //4. Set GPIO pin function
GPECON |= (0x2 << )|(0x2 << );
GPEUP |= (0x3 << ); //5. Set IIC-bus acknowledge enable
IICCON |= ( << );
} static void I2cWriteByte(unsigned char data, unsigned char addr)
{
//1. Set to Master-Transmit mode
IICSTAT |= ( << ); //2. Write slave device address
IICDS = SLAVE_WRITE_ADDR;
IICCON &= ~( << ); //3. Write 0xF0 to IICSTAT.(Generate START signal)
IICSTAT = 0xF0; // Wait Ack
while ((IICCON & ( << )) == )
I2cDelay(); //4. Write address in chip to IICDS
IICDS = addr;
IICCON &= ~( << ); // Wait Ack
while ((IICCON & ( << )) == )
I2cDelay(); //5. Write data to IICDS
IICDS = data;
IICCON &= ~( << ); // Wait Ack
while ((IICCON & ( << )) == )
I2cDelay(); //6. Write 0xD0 to IICSTAT(Generate STOP signal)
IICSTAT = 0xD0; //7. Clear Interrupt
IICCON &= ~( << ); I2cDelay();
} static void I2cReadBytes(unsigned char addr, int length, unsigned char *buf)
{
int j = ;
unsigned char unusedata; //1. Set to Master-Transmit mode
IICSTAT |= ( << ); //2. Write slave device write address
IICDS = SLAVE_WRITE_ADDR;
IICCON &= ~( << ); //3. Write 0xF0 to IICSTAT
IICSTAT = 0xF0; //Wait ACK
while ((IICCON & ( << )) == )
I2cDelay(); //4. Write address in the eeprom
IICDS = addr;
IICCON &= ~( << ); // Wait ACK
while ((IICCON & ( << )) == )
I2cDelay(); //5. Set to Master-Receive mode
IICSTAT &= ~( << );
IICSTAT |= ( << ); //6. Write slave device read address
IICDS = SLAVE_READ_ADDR;
IICCON &= ~( << ); //7. Write 0xB0 to IICSTAT for starting to receive
IICSTAT = 0xb0;
while ((IICCON & ( << )) == )
I2cDelay(); //8. Write address in chip
IICDS = addr;
IICCON &= ~( << ); while((IICCON & ( << )) == )
{
I2cDelay();
} for(j = ; j < length; j++)
{
if(j == (length - ))
{
IICCON &= ~( << );
} buf[j] = IICDS; // Clear Interrupt
IICCON &= ~( << ); // Wait for Interrupt
while ((IICCON & ( << )) == )
I2cDelay();
} //9. Write 0x90 to IICSTAT(Generate STOP signal)
IICSTAT = 0x90; //10. Clear Interrupt
IICCON &= ~( << );
} I2cModeOps i2cModeOps = {
.I2cInit = I2cInit,
.I2cWriteByte = I2cWriteByte,
.I2cReadBytes = I2cReadBytes,
}; MODULE_INSTALL(I2c, MOD_I2C, , &i2cModeOps);
I2C裸机驱动程序设计的更多相关文章
- C51单片机模拟I2C总线驱动程序设计
/********************************** I2C总线驱动 ******************************** 模块名:I2C总线驱动 型号:I2C 功能描述 ...
- DM9000裸机驱动程序设计
对于任何一个硬件模块的设计,首先第一步都是要先了解硬件本身后,再开始程序的软件设计.而由于DM9000的芯片文档内容很多,要驱动好网卡,需要很长时间,特别对于新手比较困难,所以可以参考linux内核代 ...
- linux之I2C裸机驱动解析(转)
1 硬件特性 1.1 概述 I2C总线是由Philips公司开发的两线式串行总线,这两根线为时钟线(SCL)和双向数据线(SDA).由于I2C总线仅需要两根线,因此在电路板上占用的空间更少, ...
- [国嵌攻略][153][I2C裸机驱动设计]
eeprom简介 eeprom电可擦除可编程只读存储器,是一种类似于flash的固态存储器,但是与flash相比又存在一些区别: 1.eeprom可以按位擦写,而flash只能大片擦除. 2.eepr ...
- SPI裸机驱动程序设计
1. SPI(Serial Peripheral Interface)串行外设接口,是一种高速的.全双工.同步的通信总线.采用主从模式(Master Slave)架构,支持多个slave,一般仅支持单 ...
- Linux I2C驱动程序设计
1. Linux I2C子系统架构 (1)I2C核心(I2C-Core):I2C 总线和I2C 设备驱动的中间枢纽,它提供了I2C 总线驱动和设备驱动的注册.注销方法等 (2)I2C控制器驱动(ada ...
- i2c总线驱动,总线设备(适配器),从设备,从设备驱动的注册以及匹配
常用链接 我的随笔 我的评论 我的参与 最新评论 我的标签 随笔分类 ARM裸机(13) C(8) C++(8) GNU-ARM汇编 Linux驱动(24) Linux应用编程(5) Makefile ...
- 20145316&20145229实验四:驱动程序设计
20145316&20145229实验四:驱动程序设计 结对伙伴:20145316 许心远 博客链接:http://www.cnblogs.com/xxy745214935/p/6130871 ...
- linux驱动程序设计的硬件基础,王明学learn
linux驱动程序设计的硬件基础(一) 本章讲总结学习linux设备程序设计的硬件基础. 一.处理器 1.1通用处理器 通用处理器(GPP)并不针对特定的应用领域进行体系结构和指令集的优化,它们具有一 ...
随机推荐
- 两个线程并发执行以下代码,假设a是全局变量,那么以下输出______是不可能的?
3.两个线程并发执行以下代码,假设a是全局变量,那么以下输出______是不可能的? void foo(){ ++a; printf("%d ",a);}A.3 2 ...
- Maven远程发布项目到tomcat
向tomcat发布项目,每次都要打包传送再运行,非常麻烦.偶然一天发现maven有插件可以直接发布到tomcat.今天把大体过程介绍给大家. 首先在pom中配置tomcat插件: <plugin ...
- asp.net web api 2框架揭秘文摘
第一章 概述 URI 统一资源标识符 URL 统一资源定位符 http方法:get,post,put,delete,head等 状态码:100-199,请求已被接受: 200-299,成功状态: 30 ...
- CodeForces 342A Xenia and Divisors (水题)
题意:给定 n 个数(小于等于7),让你把它分成 m 组,每组有三个数,且满足,a < b < c,并且 a 能整除 b,b 能整除 c. 析:对于这个题,因为题目说了是不大于7的,那么一 ...
- gitlab 安装提速
因为城墙的问题必须该用国内的taobao源 # 更换源地址gem sources --remove https://rubygems.org/ gem sources -a http://ruby.t ...
- gitlab发送邮件配置
在使用gitlab过程中,通常需配置邮件来实现代码管理服务器向成员(member)发送邮件.本文将实现gitlab中邮件配置 1.编辑 /etc/gitlab/gitlab.rb,修改配置邮件,这里以 ...
- XJOI 3606 最大子矩形面积/LightOJ 1083 Histogram(单调栈/笛卡尔树)
A histogram is a polygon composed of a sequence of rectangles aligned at a common base line. The rec ...
- C/C++学习的50个经典网站
C/C++是最主要的编程语言.这里列出了50名优秀网站和网页清单,这些网站提供c/c++源代码.这份清单提供了源代码的链接以及它们的小说明.我已尽力包括最佳的C/C++源代码的网站.这不是一个完整的清 ...
- 双系统Grub引导下恢复windows引导的方法
此方法适用于windows系统正常,linux和windows 双系统下恢复windows系统引导.需要使用windows安装u盘 1. 启动至windows安装u盘,点击修复计算机 2. 进入命令行 ...
- auc的本质
AUC的本质 定义 auc是roc曲线下的面积.其中,roc是横坐标为fpr,纵坐标是tpr的坐标系上的曲线. TPR(true positive rate):所有正样本中被预测为正的比例 FPR(f ...