WebGL模型拾取——射线法二
这篇文章是对射线法raycaster的补充,上一篇文章主要讲的是raycaster射线法拾取模型的原理,而这篇文章着重讲使用射线法要注意的地方。首先我们来看下图。
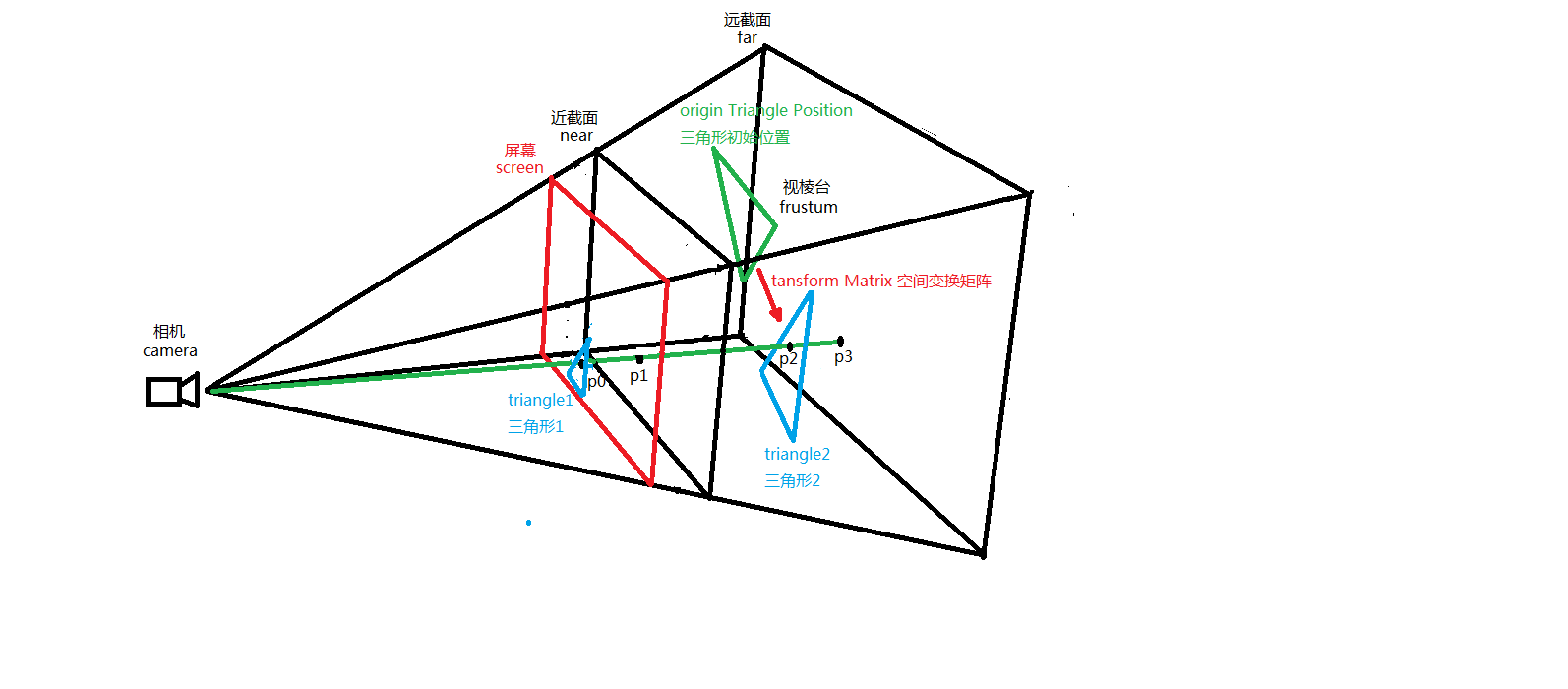
我来解释一下上图中的originTriangle,这就是Triangle2三角形第一次绘制在空间中的位置,而Triangle2当前的位置是经过一系列空间变换而来的(这些位置姿态变换大多是由用户鼠标交互产生),变换矩阵就是transformMatrix。这下就引出了本文第一个重点,那就是做raycaster的时候要保证线段碰撞模型的时候一定是模型当前所处的空间位置,即已经做过transformMatrix空间(姿态,位置)变换,否则线段如果和模型之前的初始化位置求交显然没有交点,就拾取失败了。这就是做raycaster要注意的第一个重点,即射线一定要和空间变换后的模型求交。
接下来我们再看一张图,请看下图。
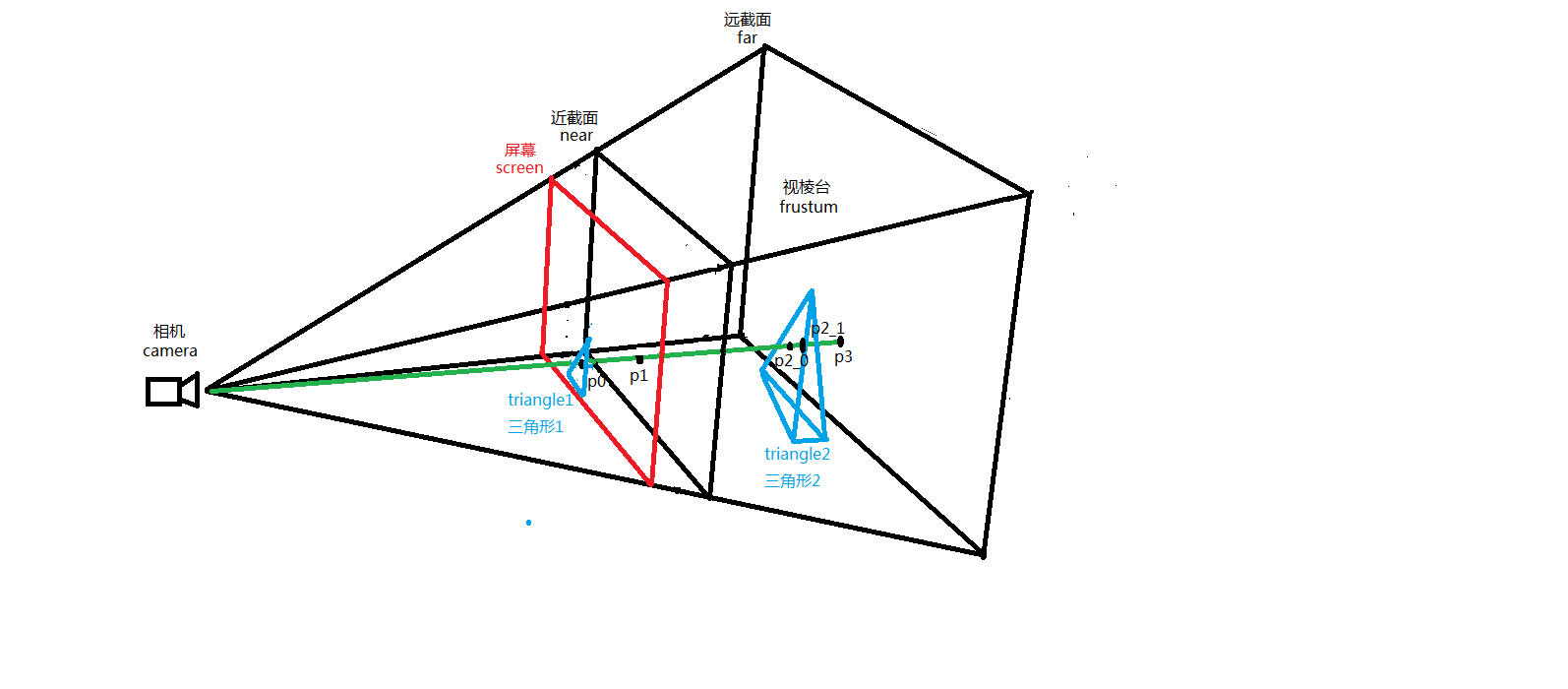
我们看到,射线和模型有2个交点,P2_0和P2_1,分别交四面体的前面于P2_0和交四面体的后面于P2_1。这就是我们要着重关注的本文第二个重点,即raycaster射线拾取模型过程中射线与单个模型有多个交点的问题。处理这个问题其实有很多办法,这里我们采用最简单的方式,就是距离相机(人眼)位置近者胜出的策略。计算交点的算法上一篇文章已经提到,这里不再赘述,但要说明的是,我们计算的每一个面在数据结构中都有自身模型父节点geometry,如果像上图一个四面体的geometry和射线产生了多个面相交,那我们就认为鼠标选中的是该模型geometry离相机(camera)(人眼)最近的交面上的交点。
对于上面2点的叙述,配合部分代码展示,是geometry空间变换的,代码如下。
Object.assign(CubeSection.prototype, {
//重载,每一帧同步数据
sync: function () {
if(this._mode === "face") {//根据剖切模式管理鼠标拖拽逻辑
if (this._selectFace) {
let camera = this._viewer.getMainCamera();
let last = this._mousePoints.getLast();
let lastX = camera.getNormalizedX(last[]);
let lastY = camera.getNormalizedY(last[]);
let current = this._mousePoints.getCurrent();
let currentX = camera.getNormalizedX(current[]);
let currentY = camera.getNormalizedY(current[]);
this._mousePoints.sync();
let deltaX = currentX - lastX;
let deltaY = currentY - lastY;
if (Math.abs(deltaX) < Algorithm.EPSILON && Math.abs(deltaY) < Algorithm.EPSILON)
return;
//如果面被选中,并且有移动量,需要进行剖切面移动处理
let start = Vec3.MemoryPool.alloc();
let end = Vec3.MemoryPool.alloc();
camera.computeScreenToWorldNearFar(lastX, lastY, start, end, true);
//获取起点与平面的交点
let plane = this._cubeClip.getClipPlane(this._selectFace.getName());
let planePt1 = Vec3.MemoryPool.alloc();
if (Plane.intersectLine(planePt1, start, end, plane)) {
//将模型交点再转换到屏幕坐标上,主要为了获取z值给终点
let temppt = Vec3.MemoryPool.alloc();
camera.computeWorldToScreen(planePt1, temppt);
Vec3.set(temppt, currentX, currentY, temppt[]);
let planePt2 = Vec3.MemoryPool.alloc();
camera.computeScreenToWorld(temppt, planePt2);
Vec3.sub(temppt, planePt2, planePt1);
let dist = Vec3.dot(plane, temppt);
this.move(dist);
Vec3.MemoryPool.free(planePt2);
Vec3.MemoryPool.free(temppt);
}
Vec3.MemoryPool.free(planePt1);
Vec3.MemoryPool.free(start);
Vec3.MemoryPool.free(end);
}
} else if(this._mode === "translate"){
if(this._selectAxis) {
let camera = this._viewer.getMainCamera();
let last = this._mousePoints.getLast();//前一帧鼠标的XY坐标
let lastX = camera.getNormalizedX(last[]);
let lastY = camera.getNormalizedY(last[]);
let current = this._mousePoints.getCurrent();//目前帧鼠标的XY坐标
let currentX = camera.getNormalizedX(current[]);
let currentY = camera.getNormalizedY(current[]);
this._mousePoints.sync();//继续下一帧同步鼠标XY坐标
let deltaX = currentX - lastX;//X偏移量
let deltaY = currentY - lastY;//Y偏移量
if (Math.abs(deltaX) < Algorithm.EPSILON && Math.abs(deltaY) < Algorithm.EPSILON) {
//如果XY偏移量都为零,就直接返回,什么操作都不做
return;
}
//坐标系轴被选中,并且有偏移量,就要移动整个包围盒子
let start = Vec3.MemoryPool.alloc();
let end = Vec3.MemoryPool.alloc();
//把屏幕上的XY坐标换算到视棱台near,far截面上的XY坐标
camera.computeScreenToWorldNearFar(lastX, lastY, start, end, true);
//当前pick的坐标轴
let axis = this._selectAxis;
//near-far线段截axis坐标轴的交点
let intersectPoint1 = Vec3.MemoryPool.alloc();
//射线碰撞
let intersections = this._drawActor.linesegmentIntersect(start, end);//对场景中的所有物体进行线段碰撞检测
//遍历intersections列表,按照离相机从远到近排列
for (let i = ; i < intersections.length; i++) {
let geometry = intersections[i].getDrawable().getGeometry();
if (geometry && new String(geometry._name).substring(, ) === "axis") {
intersectPoint1 = intersections[i]._point;//获取到near-far线段和坐标轴的交点
break;
}
}
//将near-far和坐标轴的交点再转换到屏幕坐标上,主要为了获取z值给终点
let screenPoint = Vec3.MemoryPool.alloc();
camera.computeWorldToScreen(intersectPoint1, screenPoint);
//screePoint(currentX, currentY, screenPoint.z)
Vec3.set(screenPoint, currentX, currentY, screenPoint[]);
//鼠标移动的第二个场景坐标系里的点坐标
let intersectPoint2 = Vec3.MemoryPool.alloc();
//把屏幕归一化坐标转化为场景世界坐标
camera.computeScreenToWorld(screenPoint, intersectPoint2);
Vec3.sub(screenPoint, intersectPoint2, intersectPoint1);
let dist = ;
if(this._selectAxis._name === "axisX"){
dist = screenPoint[];
}else if(this._selectAxis._name === "axisY"){
dist = screenPoint[];
}else if(this._selectAxis._name === "axisZ"){
dist = screenPoint[];
}
this.move(dist);
//析构向量
Vec3.MemoryPool.free(intersectPoint1);
Vec3.MemoryPool.free(intersectPoint2);
Vec3.MemoryPool.free(screenPoint);
Vec3.MemoryPool.free(start);
Vec3.MemoryPool.free(end);
}
} else if(this._mode === "rotate"){
} else if(this._mode === "scale"){
}
},
updateTransform: function () {
let mat = this._cubeRoot.getMatrix();
//重新计算坐标系模型的_matrix
this._coordinateSection.update(this._clipBox, this._scale, this._translate, this._rotate, this._scaleMatrix, this._translateMatrix, this._rotateMatrix, mat);
Mat4.fromScaling(this._scaleMatrix, this._scale);
Mat4.fromTranslation(this._translateMatrix, this._translate);
Mat4.fromQuat(this._rotateMatrix, this._rotate);
Mat4.mul(mat, this._translateMatrix, this._rotateMatrix);
Mat4.mul(mat, mat, this._scaleMatrix);
//剖切面数据的变换
this._cubeClip.resetClipPlane();
this._cubeClip.transformClipPlane(mat);
//包围盒子更新
this._clipBox.setMaxValue(0.5, 0.5, 0.5);
this._clipBox.setMinValue(-0.5, -0.5, -0.5);
this._clipBox.transformMat4(mat);
},
接下来是选取离相机近的交点,代码如下
//拾取物体,根据当前剖切模式选择intersections列表中的碰撞对象
pick: function (x, y) {
let camera = this._viewer.getMainCamera();
let start = Vec3.MemoryPool.alloc();
let end = Vec3.MemoryPool.alloc();
camera.computeScreenToWorldNearFar(x, y, start, end);
let intersections = this._drawActor.linesegmentIntersect(start, end);
let l = intersections.length;
if (l !== ) {
switch(this._mode){
case "face" : {//面剖切
let intersection = intersections[];//LineSegmentIntersection
let geometry = intersection.getDrawable().getGeometry();
if (geometry) {
this._selectFace = geometry;
this._selectFace.setStateSet(this._selectState);
return true;
}
}
case "translate" : {//平移剖切
//遍历intersections列表,按照离相机从远到近排列
for(var i=; i<l; i++){
let geometry = intersections[i].getDrawable().getGeometry();
if(geometry && new String(geometry._name).substring(, ) === "axis"){
this._selectAxis = geometry;
this._selectAxis.setStateSet(this._selectStateAxis);
break;
}
}
return true;
}
case "rotate" : {//旋转剖切
//遍历intersections列表,按照离相机从远到近排列
for(var i=; i<l; i++){
let geometry = intersections[i].getDrawable().getGeometry();
if(geometry && new String(geometry._name).substring(, ) === "face"){
this._selectAxisFace = geometry;
this._selectAxisFace.setStateSet(this._selectStateAxisFace);
break;
}
}
return true;
}
case "scale" : {//缩放剖切
//遍历intersections列表,按照离相机从远到近排列
for(var i=; i<l; i++){
let geometry = intersections[i].getDrawable().getGeometry();
if(geometry && new String(geometry._name).substring(, ) === "axis"){
this._selectAxis = geometry;
this._selectAxis.setStateSet(this._selectStateAxis);
break;
}
}
return true;
}
}
}
return false;
},
其中intersections[]交点列表是按照离相机由远到近距离排序的,intersection[i]交点离相机距离比intersection[i+1]交点离相机距离要近。这就是我们采取的离相机近交点胜出原则。
好了,以上就是raycaster射线拾取模型要注意的地方,如有错误,希望读者斧正,欢迎诸位同学留言。如需转载本文,请注明出处:https://www.cnblogs.com/ccentry/p/9977490.html
WebGL模型拾取——射线法二的更多相关文章
- WebGL模型拾取——射线法
今天要把WebGL中一个非常重要的算法记录下来——raycaster射线法拾取模型.首先我们来了解一下为什么要做模型拾取,我们在做webgl场景交互的时候经常要选中场景中的某个模型,比如鼠标拖拽旋转, ...
- Away3D引擎学习笔记(三)模型拾取(翻译)
原文详见http://away3d.com/tutorials/Introduction_to_Mouse_Picking.本文若有翻译不对的地方,敬请指出. 本教程详细介绍了Away3D 4.x中鼠 ...
- 射线法(1190 - Sleepwalking )
题目:http://lightoj.com/volume_showproblem.php?problem=1190 参考链接:https://blog.csdn.net/gkingzheng/arti ...
- matlab练习程序(射线法判断点与多边形关系)
依然是计算几何. 射线法判断点与多边形关系原理如下: 从待判断点引出一条射线,射线与多边形相交,如果交点为偶数,则点不在多边形内,如果交点为奇数,则点在多边形内. 原理虽是这样,有些细节还是要注意一下 ...
- LightOj1190 - Sleepwalking(判断点与多边形的位置关系--射线法模板)
题目链接:http://lightoj.com/volume_showproblem.php?problem=1190 题意:给你一个多边形含有n个点:然后又m个查询,每次判断点(x, y)是否在多边 ...
- Codeforces 375C Circling Round Treasures - 最短路 - 射线法 - 位运算
You have a map as a rectangle table. Each cell of the table is either an obstacle, or a treasure wit ...
- Revit API射线法读取空间中相交的元素
Revit API提供根据射线来寻找经过的元素.方法是固定模式,没什么好说.关键代码:doc.FindReferencesWithContextByDirection(ptStart, (ptEnd ...
- 【BZOJ1294】[SCOI2009]围豆豆Bean 射线法+状压DP+SPFA
[BZOJ1294][SCOI2009]围豆豆Bean Description Input 第一行两个整数N和M,为矩阵的边长. 第二行一个整数D,为豆子的总个数. 第三行包含D个整数V1到VD,分别 ...
- SGU 124. Broken line 射线法 eps的精准运用,计算几何 难度:3
124. Broken line time limit per test: 0.25 sec. memory limit per test: 4096 KB There is a closed bro ...
随机推荐
- Linux之/etc/fstab文件讲解
/etc/fstab是用来存放文件系统的静态信息的文件.位于/etc/目录下,可以用命令less /etc/fstab 来查看,如果要修改的话,则用命令 vi /etc/fstab 来修改.当系统启动 ...
- October 21st 2017 Week 42nd Saturday
Only I can change my life. No one can do it for me. 只有我可以改变我的命运,没有人可以帮我做. Stop complaining about the ...
- 复杂json的解析:jsonobject与jsonArray的使用
String parameter = { success : 0, errorMsg : "错误消息", data : { total : "总记录数", ro ...
- 【Ansible 文档】【译文】入门教程
http://docs.ansible.com/ansible/latest/intro_getting_started.html Foreword 前言 到这里,你应该已经安装了Ansible,是时 ...
- Netty入门(三)构成部分
该节主要讲解 Netty 的构成部分. 一.Channel 它代表一个用于连接到实体如硬件设备.文件.网络套接字或程序组件,能够执行一个或多个不同的 I/O 操作的开放连接.可以比作传入和传出数据的传 ...
- Android友盟推送
当前版本号:v3.0.5 1.下载SDK解压并导入(import module,compile project(':PushSDK')),里面有demo,用demo的包名去官网添加一个应用,然后替换d ...
- 2018.4.26 Mac安装Redis5.0.3版本服务器
Mac安装Redis服务器 安装 1.到官网下载 选择稳定版本 打开官网:https://redis.io/ 2.下载完成后,打开命令行工具,执行解压命令 tar zxvf redis-5.0.3.t ...
- vagrant特性——基于docker开发环境(docker和vagrant的结合)-0-简介
原文https://www.hashicorp.com/blog/feature-preview-docker-based-development-environments Feature Previ ...
- day4-课堂笔记
变量 成员变量-构造方法里定义 self.xxx 使用:类内部: self.xxx 类外部: 先创建实例 实例.xxx 类变量 类定义下面直接定义 使用:类方法内 cls.xxx 类名.xxx sel ...
- MP实战系列(十五)之执行分析插件
SQL 执行分析拦截器[ 目前只支持 MYSQL-5.6.3 以上版本 ],作用是分析 处理 DELETE UPDATE 语句, 防止小白或者恶意 delete update 全表操作! 这里我引用M ...