如何保证FPGA PCIe唤醒能满足PC的100ms 的时间要求(Autonomous Mode)?
原创By DeeZeng [ Intel FPGA笔记 ]
PC 需要PCIe设备在 100ms 内启动,这样PC 才能扫描到PCIe 设备。对于 FPGA PCIe 板卡,同样也需要满足这个时间要求。
Intel FPGA系列是基于sram的,也就是掉电丢失,所以会需要配置器件。配置模式有很多种,以我们常见的 ASx4 和 FPP为例:
1. ASx4 :只需要一颗 EPCS/PECQ 即可配置
2. FPP : 需要一个额外外部Host 用来搬移 配置数据,由于是并行 x8 x16 x32,配置时间会少很多。
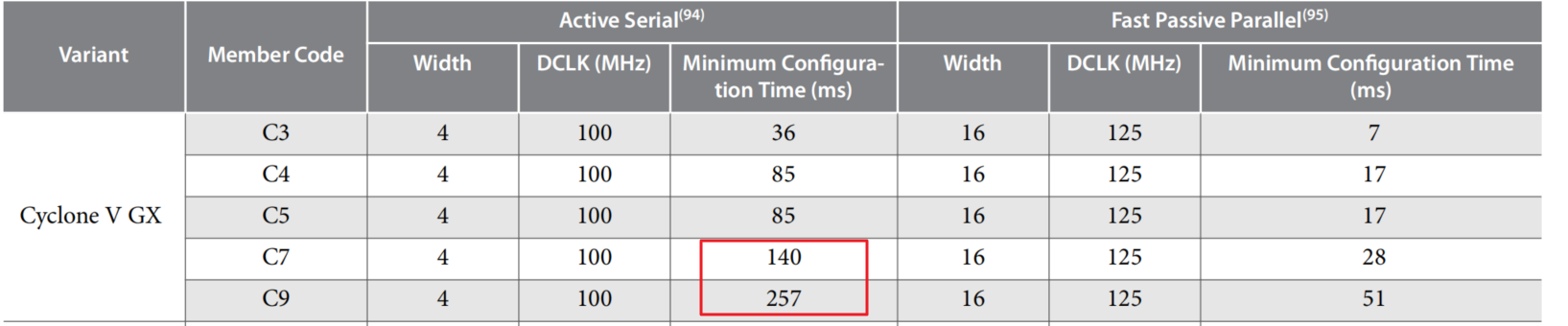
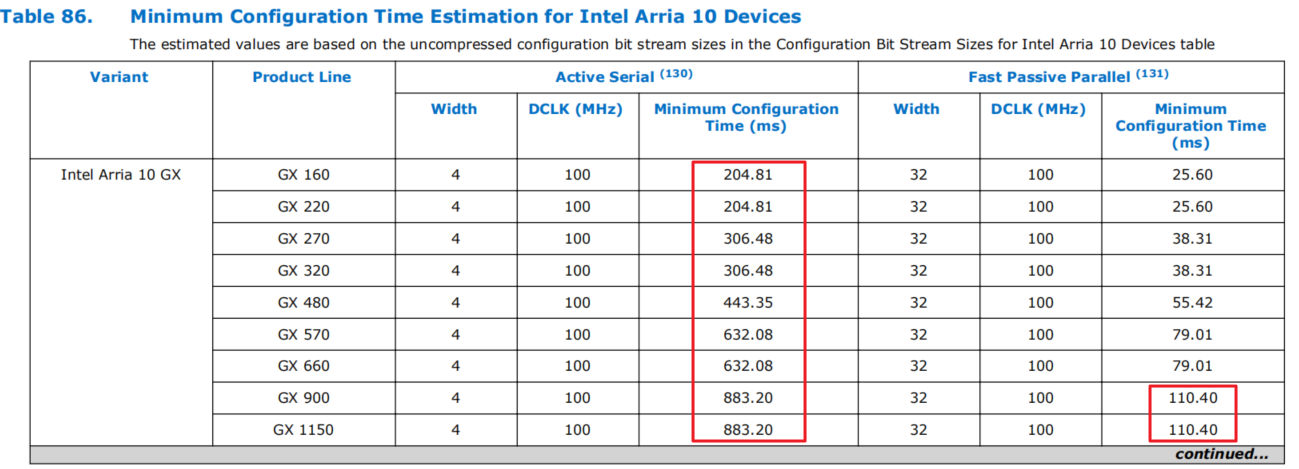
如下抽出两张 Cyclone V 和 Arria 10 的 AS FPP 配置时间差异
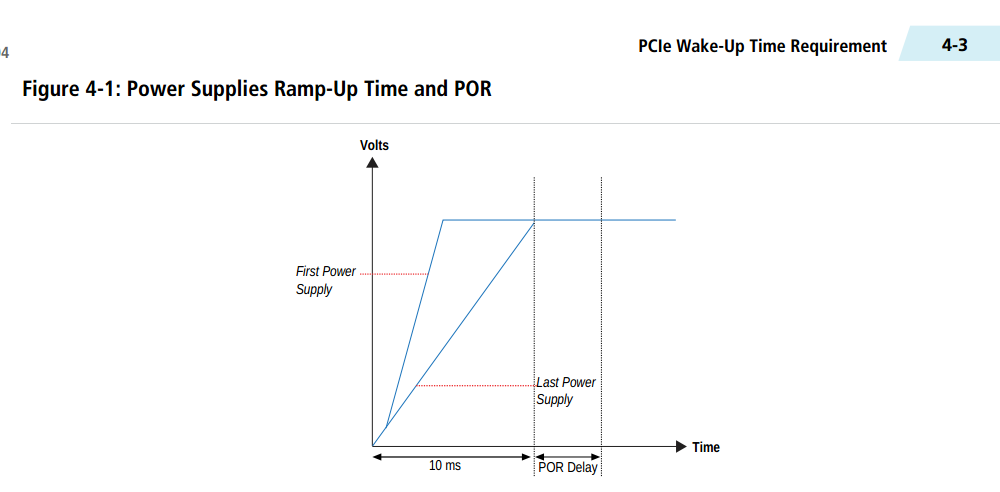
PCIe 100ms 或FPGA 120 ms 的时间(请具体分析之后给出的 Figure 2-2 ,Table 2-1图片),可不单纯包含FPGA configuration Time,还包含Ramp Time ,POR Time等。
减去这两项时间,那FPGA configuration 80 ms 左右的都有点不保险了。
也就是当我们 Cyclone V 逻辑资源大的器件,或Arria10 器件,当使用AS x4模式的时候,PCIe应用会满足不了唤醒时间!
(Arria10的最大两个器件,甚至FPP32时间也满足不了)
而实际硬件设计或板子必须或已经采用 EPCQ方案了(毕竟很多情况只会用一颗EPCQ,而不用FPP的 外部Host+并行Flash)
那如何解决呢?
- 外接供电,先于 Host 开机。 (好吧,这用起来几多麻烦)
- PCIe供电,Host 开机两次。(重启FPGA不需要再配置)
- Autonomous PCIe HIP Mode (注意要器件支持这个功能)
什么是Autonomous PCIe HIP模式?
Autonomous 模式对满足PCIe 100ms 唤醒时间非常有用。Intel FPGA设备会先接收periphery image,然后再接收 Core image.
配置完Core image 后,FPGA进入user mode. 在Autonomous HIP 模式下,PCIe Hard IP 在periphery image配置完后就能工作,
完成Link Training 后,PCIe Hard IP 就能响应 host, 从而减少唤醒时间。 而不用等到 Core image 配置完进入user mode才开始。
Autonomous PCIe HIP Mode 和 CvP 的模式是类似的,如下以CVP的两张图类比说明Autonomous PCIe HIP Mode 与否的差异。
PCIe Active的 时间 = a(ramp time) + b (POR) + Program and calibrate
https://www.intel.com/content/dam/www/programmable/us/en/pdfs/literature/ug/ug_a10_cvp_prop.pdf
1. Autonomous PCIe HIP Mode : 只需 program Periphery image ,Hard PCIe就起来了。
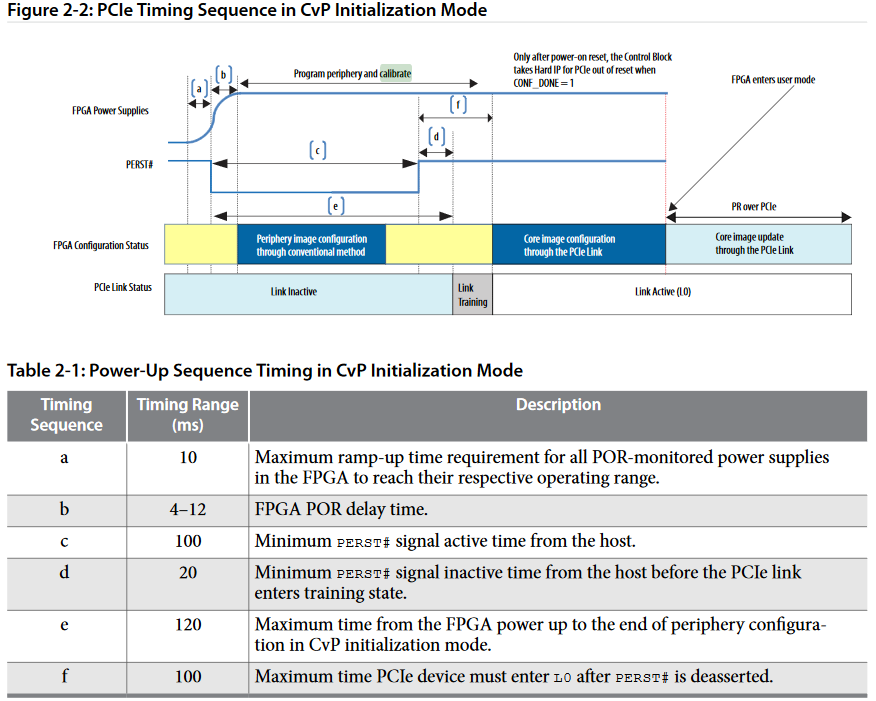
2. 非Autonomous PCIe HIP Mode : 需要Program Full image ,Hard PCIe才起来。
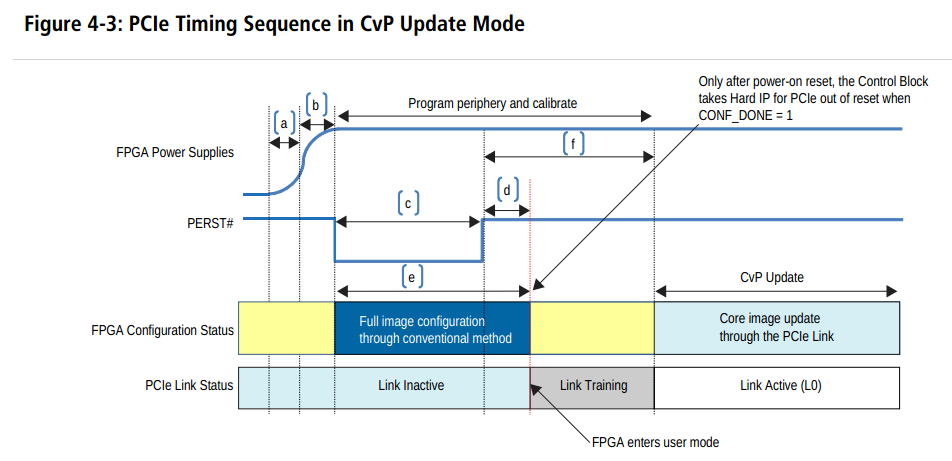
所以使能Autonomous PCIe HIP Mode 可以减少 (Full image - Periphery image)数量的Config bits,大大缩短时间。
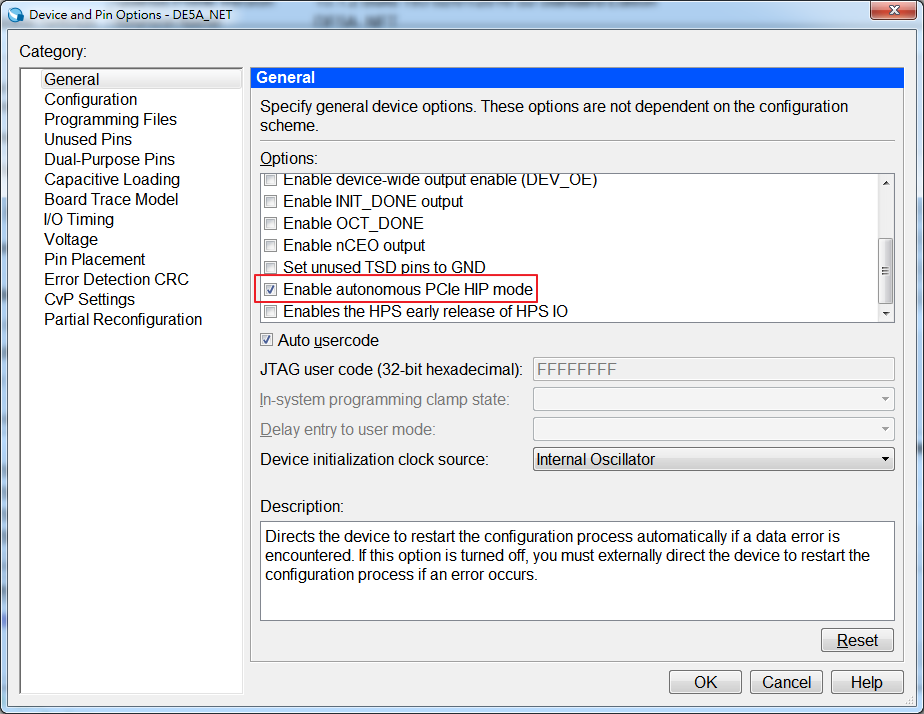
这么有用,那如何设置 Autonomous 模式呢?简单,在 Quartus 工程中设置勾选一下即可。
Cyclone V,Arria V 和 Stratix V 以及之后出来的 Arria 10 ,Stratix 10 等 都支持 autonomous PCIe HIP Mode.
注意: 1. PCIe Hard IP。 2. 支持这个功能的器件。
这样开机无法找到PCIe,重启才能找到的案例。打开这个模式之后,第一次开机就能直接找到PCIe啦。
What? 担心打开了Autonomous PCIe HIP Mode还是无法满足 PCIe的唤醒100ms时间要求?
那我们来进行一次具体计算,看如何计算这些时间
以 Arria10 1150的器件,使用AS x4 来计算(其他系列计算类似)
PCIe Active的时间 = a(ramp time) + b (POR) + Program and calibrate
1. Ramp Time: Ramp Time 这是FPGA开发板 Power 电路决定的
假设10ms
2. POR delay: 这个delay是,POR电路监控的所有Power都起来了,然后delay一个时间用以保证,FPGA准备好被配置。

可以看到 Fast POR 和 Standard POR 是有很大差异的,我们必须设置MSEL,将POR切到 Fast
这里算 fast 的 12ms
3. Program and calibrate
3.1 Program periphery image

为计算配置periphery image的时间:
这里 Configuration File size 我们用 periphery image : Datasheet中CvP的IOCSR数据 2756096
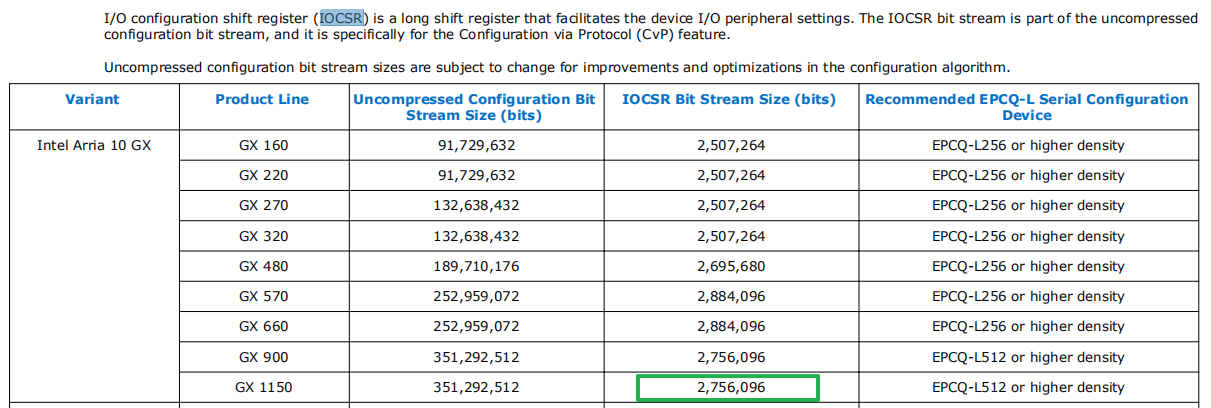
Number of data line 用 AS x4 的 4
DCLK 用 AS 的 100MHz
config time = 2756096/4* (1/100MHz) = 6.9 ms (远小于 full image 的 800+ ms)
3.2 Calibrate
Transceiver calibration begins with the bottom PCIe IP core on eachside of the device. Consequently, this IP core has a faster wake up time
这个时间在 A10 是有一个nios硬核ip 会进行calibration,从bottom的开始。时间花费应该不多。
所以打开 Autonomous Mode总时间为: 10 + 12 + 6.7 + 少量Calibrate时间 ≈ 30ms ,很简单就满足PCIe唤醒时间要求。
重复一下这张图: 我们Arria10 1150K,用ASx4的EPCQ config periphery image 都只需要 7ms 不到,那这张图的timing应该很好满足了。
不过硬件的 Ramp Time应该是影响的,如果超了10ms (别超),也许就是 和 ramp+POR+config 的时间加起来和 120ms 对比了
是否会算了呢?
按上面的计算,A10 最大器件用ASx4 也没问题。
这样 Arria10 以下28nm以上的器件直接打开 Autonomous PCIe HIP Mode 就好哟。
如何保证FPGA PCIe唤醒能满足PC的100ms 的时间要求(Autonomous Mode)?的更多相关文章
- 推荐 的FPGA设计经验(3) 物理实现和时间闭环优化
Optimizing Physical Implementation and Timing Closure Planning Physical Implementation When planning ...
- HC-08 BLE资料
1.1 特点简介 HC-08蓝牙串口通信模块是新一代的基于Bluetooth Specification V4.0 BLE蓝牙协议的数传模块.无线工作频段为 2.4GHz ISM,调制方式是 GFSK ...
- PC和FPGA间的串口通信实现
应用笔记 V1.0 2015/03/26 PC和FPGA间的串口通信实现 概述 本文将介绍PC和FPGA间的串口通信实现的基本思路和Verilog代码,对于通信而言,收发双方都要有相应的控制. ...
- FPGA Timing笔记
很多FPGA工程师都会遇到timing的问题,如何让FPGA跑到更快的处理频率是永久话题.决定FPGA的timing关键是什么?如何才能跑到更快的频率呢? A. 第一步需要了解FPGA的timing路 ...
- 基于WDF的PCI/PCIe接口卡Windows驱动程序(4)- 驱动程序代码(源文件)
原文出处:http://www.cnblogs.com/jacklu/p/4687325.html 本篇文章将对PCIe驱动程序的源文件代码作详细解释与说明.整个WDF驱动程序工程共包含4个头文件(已 ...
- PCIE_DMA实例四:xapp1052在Xilinx 7系列(KC705/VC709)FPGA上的移植
PCIE_DMA实例四:xapp1052在Xilinx 7系列(KC705/VC709)FPGA上的移植 一:前言 这段时间有个朋友加微信请求帮忙调试一块PCIe采集卡.该采集卡使用xilinx xc ...
- FPGA开发流程
需求说明:Verilog设计 内容 :FPGA开发基本流程及注意事项 来自 :时间的诗 原文来自:http://www.dzsc.com/data/2015-3-16/1080 ...
- 基于FPGA Manager的Zynq PL程序写入方案
本文主要描述了如何在Linux系统启动以后,在线将bitstream文件更新到ZYNQ PL的过程及方法.相关内容主要译自xilinx-wiki,其中官网给出了两种方法,分别为Device Tree ...
- FPGA资源平民化的新晋- F9 技术解析
FPGA (现场可编程门阵列)由于其硬件并行加速能力和可编程特性,在传统通信领域和IC设计领域大放异彩.一路走来,FPGA并非一个新兴的硬件器件,由于其开发门槛过高,硬件加速算法的发布和部署保护要求非 ...
随机推荐
- Ng-Matero:基于 Angular Material 搭建的中后台管理框架
前言 目前市面上关于 Angular Material 的后台框架比较少,大多都是收费主题,而且都不太好用. 很多人都说 Material 是一个面向 C 端的框架,其实在使用其它框架做管理系统的时候 ...
- java日期在今天的基础上加一个月。并计算时间相差天数
Calendar calendar = Calendar.getInstance(); calendar.setTime(date); calendar.add(Calendar.MONTH, 1); ...
- cookie 和 session 设置
cookie: 保存在浏览器上的一组键值对, 是由服务器让浏览器进行设置的 下次浏览器访问的时候会携带cookie. request是客户端请求, response是服务端响应. 读取客户端的cook ...
- 执行某个文件夹下面的所有.py文件
# 写一个函数,接受一个参数,如果是文件,就执行这个文件,如果是文件夹,就执行这个文件夹下所有的py文件 # 工作应用场景,假设一个文件夹下面有100个py文件,同步一些时间 # 例如抢票软件 10点 ...
- 数字IC前后端设计中的时序收敛(二)--Setup违反的修复方法
本文转自:自己的微信公众号<数字集成电路设计及EDA教程> 里面主要讲解数字IC前端.后端.DFT.低功耗设计以及验证等相关知识,并且讲解了其中用到的各种EDA工具的教程. 考虑到微信公众 ...
- Oracle数据库----视图
--创建简单视图--建立用于查询员工号.姓名.工资的视图.create view emp_viewasselect empno,ename,sal from emp; --查询视图select * f ...
- SQL Server Form子查询、链接查询
所用数据表:用户,钱包,订单 一.from子查询 --查询钱包里金额大于30000 and User_ID = Users.ID) ) 二.链接查询 内连接(inner join)外连接(left/r ...
- Linux soft lockup 和 hard lockup
一. 整体介绍 soft lockup:检测调度异常, 一般是驱动禁止调度或者阻塞比如while(1), 导致无法调度其他线程, 需要注意的是, 应用程序while(1)不会影响其调度, 只要有更高的 ...
- 使用WebService发布soap接口,并实现客户端的https验证
什么是https HTTPS其实是有两部分组成:HTTP + SSL / TLS, 也就是在HTTP上又加了一层处理加密信息的模块,并且会进行身份的验证. 如何进行身份验证? 首先我们要明白什么是对称 ...
- 20190127-Orleans与SF小伙伴的部分问答
Orleans 怎么部署到服务器? 方式1:Orleans 服务端寄宿在Web应用中,将Web应用部署到服务器 方式2:通过SF/K8s部署到服务器 不同服务器上的谷仓和谷如何调配? 由Orleans ...