论文笔记 Robust face landmark estimation under occlusion
1. Abstract
现实世界中的人脸很多时候都存在遮挡以及大的形状变化,而目前的人脸关键点检测方法在这种情况下表现欠佳,
因为它们未能提供一种系统的方法来处理异常。因而authors提出一种新的方法--稳健级联姿态回归(RCPR),这
是基于姿态级联回归(CPR)方法的改进。此方法在数据集LFW、LFPW、HELEN以及COFW(作者引入的数据集)
上表现比state-of-the-art 方法要好。大约能够降低一半的错误率;在检测人脸遮挡部分的precision/recall 为80/40%。
2. Introduction
CPR方法在人脸关键点检测中表现高效,但在遮挡以及较大形状变化的情况下有所欠缺。RCPR方法在现实世界中
表现稳健,在估计关键点位置的同时能够检测出人脸的遮挡区域。因为遮挡信息在学习选择未遮挡区特征期间能够
起到作用,并且可以被动态地利用(通过稳健统计量)从而在级联中减小误差,
主要contributions:
(1) 提出RCPR方法,对差的初始值、大的形状变化和遮挡稳健。第一个方法既能检测遮挡又能同时估计关键位置
(2) 引入新的数据集COFW,数据集中的人脸包含遮挡以及大的形状变化,比较接近现实情况。
3. Related work
shape 估计模型:
(1)ASM、AAM :泛化能力差、训练慢,现实条件下表现差
(2)modern 方法:先检测出目标,再估计位置 ;准确率较低
(3)回归方法(RCP):直接预测目标的shape;boosted regression + random fern regressors
4. Method
4.1 CPR
在CPR的基础上进行改进,从而使得RCPR对遮挡以及大的形状变化稳健。
用CPR估计shape:$ S_p = [x_p,y_p],p = 1,2,...,P;$ 表示P个关键点的位置坐标
CPR由T个回归器 \(R^{1...T}\) 级联组成。先初始化 \(S^0\) ,然后逐步估计,最后输出 \(S^T\) 。
输入:Image I, initial guess \(S^0\) , regressors $ R^{1...T}$ ,shape-indexed features $ h^{1...T}$
for t = 1 to T do
//compute shape-indexed features(提取特征)
$x^t = h^t(S^{t-1},I) $
// evaluate regressor(用回归器估计update $ \delta $S)
$ \delta $S = $ S^{t-1} $ + $ \delta $S
end
输出:final estimation $ S^T$
回归器$ R^t$ 的训练使得真实的shape与当前估计值\(S^{t-1}\)之间的差异最小
CPR具体的想法可以参考https://pdollar.github.io/files/papers/DollarCVPR10pose.pdf
RCPR
对遮挡稳健
ground-truth 标记
把数据集中人脸的关键点标记成0-1,分别表示遮挡与未遮挡(训练过程中当作连续变量,最后利用PR曲线选取阈值二值化)
occlusion-centered approach
这个方法对$\delta $S 的估计稳健
把人脸分成3x3 一共9个区域,每个小区域具有特定的遮挡比例。然后训练 \(S_{tot}\)个回归器,保证它们"visually different",
最后根据遮挡比例对回归器进行加权估计Shape的更新量
对形状变化稳健
Interpolated shape-indexed features
在进行shape 估计时对遮挡形状变化比较稳健,并且速度快.
smart restarts
CPR是依赖初值的选取。 给定原始图像和不同的初始值,先用10%的级联回归器回归,然后比较差异性,若小于阈值,
再继续用剩下的90%回归器估计。否则重新初始化。实验 证明如此效果高效,通过交叉验证设置阈值为0.15
5. Experiments & results
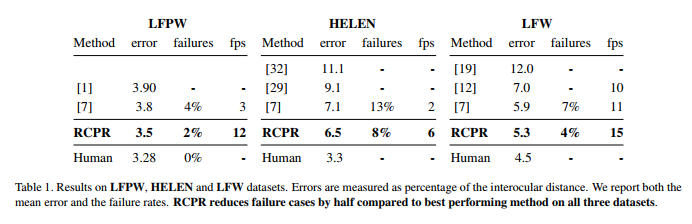
在三个数据集(LFW、LFPW、HELEN)上比较实验结果。RCPR只用feature + restart
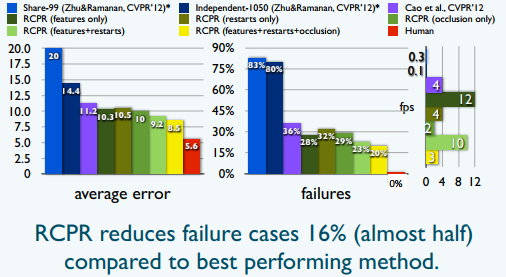
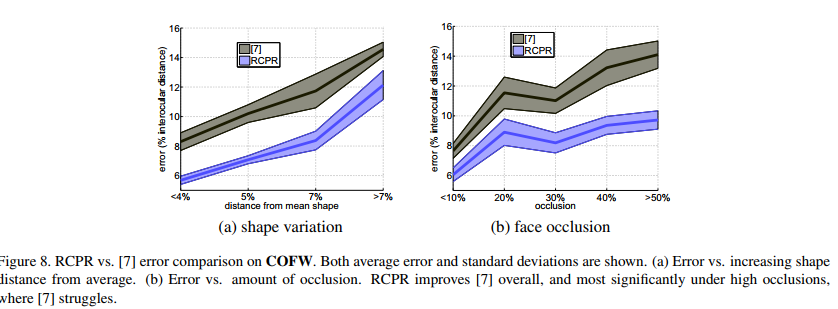
在引入数据集(COFW)上测试效果。
结果图如下:
6. Conclusion
RCPR能够检测遮挡的同时估计关键点的位置。并且在有遮挡、形状有较大变化的情况下稳健。
7. References
[1] Xavier P. Burgos-Artizzu,Pietro Perona,and Piotr Dollar .Robust face landmark estimation under occlusion.In ICCV,2013
https://ieeexplore.ieee.org/document/6751298/
论文笔记 Robust face landmark estimation under occlusion的更多相关文章
- [论文笔记] Fine-Grained Head Pose Estimation Without Keypoints
Fine-Grained Head Pose Estimation Without Keypoints 简介 head pose estimation 经典论文,使用CNN预测三个角度值,pitch, ...
- [论文笔记] Improving Head Pose Estimation with a Combined Loss and Bounding Box Margin Adjustment
Improving Head Pose Estimation with a Combined Loss and Bounding Box Margin Adjustment 简介 本文提出了一种网络结 ...
- 【论文阅读】Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks
Wing Loss for Robust Facial Landmark Localisation with Convolutional Neural Networks 参考 1. 人脸关键点: 2. ...
- 论文笔记系列-Neural Network Search :A Survey
论文笔记系列-Neural Network Search :A Survey 论文 笔记 NAS automl survey review reinforcement learning Bayesia ...
- Video Frame Synthesis using Deep Voxel Flow 论文笔记
Video Frame Synthesis using Deep Voxel Flow 论文笔记 arXiv 摘要:本文解决了模拟新的视频帧的问题,要么是现有视频帧之间的插值,要么是紧跟着他们的探索. ...
- Deep Reinforcement Learning for Visual Object Tracking in Videos 论文笔记
Deep Reinforcement Learning for Visual Object Tracking in Videos 论文笔记 arXiv 摘要:本文提出了一种 DRL 算法进行单目标跟踪 ...
- 【论文笔记系列】AutoML:A Survey of State-of-the-art (下)
[论文笔记系列]AutoML:A Survey of State-of-the-art (上) 上一篇文章介绍了Data preparation,Feature Engineering,Model S ...
- Deep Learning论文笔记之(四)CNN卷积神经网络推导和实现(转)
Deep Learning论文笔记之(四)CNN卷积神经网络推导和实现 zouxy09@qq.com http://blog.csdn.net/zouxy09 自己平时看了一些论文, ...
- 论文笔记之:Visual Tracking with Fully Convolutional Networks
论文笔记之:Visual Tracking with Fully Convolutional Networks ICCV 2015 CUHK 本文利用 FCN 来做跟踪问题,但开篇就提到并非将其看做 ...
随机推荐
- java.lang.IllegalStateException: Mapped class was not specified
错误如下:java.lang.IllegalStateException: Mapped class was not specifiedat org.springframework.util.Asse ...
- Java设计模式—建造者模式
建造模式: 将一个复杂的对象的构建与它的表示分离,使得同样的构建 过程可以创建不同的. 建造模式表示是将复杂的内部创建封装在内部,对于外部调用的人来说,只需要传入建造者和建造工具,对于内 ...
- LeetCode 545----Boundary of Binary Tree
Given a binary tree, return the values of its boundary in anti-clockwise direction starting from roo ...
- android:项目迁移error:Please change caller according to com.intellij.....
迁移到Android Studio中的项目,在运行时有时会在Event Log中报这种错: Please change caller according to com.intellij.openapi ...
- @autowired 和@resource的区别
1. @Autowired与@Resource都可以用来装配bean. 都可以写在字段上,或写在setter方法上. 2. @Autowired默认按类型装配(这个注解是属业spring的),默认情 ...
- 【转】ubuntu右键在当前位置打开终端
ubuntu右键在当前位置打开终端 ubuntu增加右键命令: 在终端中打开 软件中心: 搜索nautilus-open-terminal安装 命令行: sudo apt-ge ...
- 转:Eclipse+webservice开发实例
原文地址:http://blog.csdn.net/xw13106209/article/details/7049614 1.参考文献: 1.利用Java编写简单的WebService实例 http ...
- [控件] CircleView
CircleView 效果图: 源码: // // CircleView.h // YXMWeather // // Created by XianMingYou on 15/2/17. // Cop ...
- 解析UIControl
解析UIControl 从下图可以看出,UIControl继承自UIView,添加了响应事件功能. UIButton之所以能响应各种各样的事件是因为继承自UIControl 使用UIControl可以 ...
- Redis学习---基础学习[all]
什么是NoSQL型数据库 NoSQL数据库---NoSQL数据库的分类 Redis学习---NoSQL和SQL的区别及使用场景 Redis学习---负载均衡的原理.分类.实现架构,以及使用场景 什么是 ...