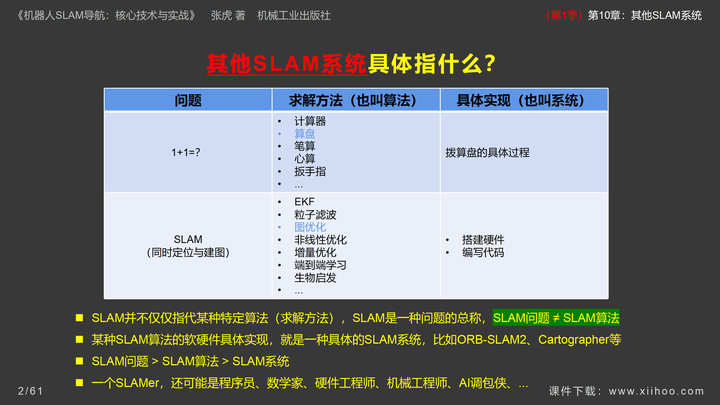
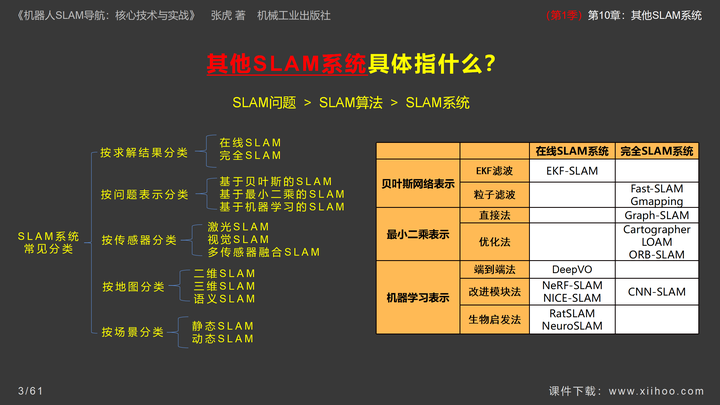
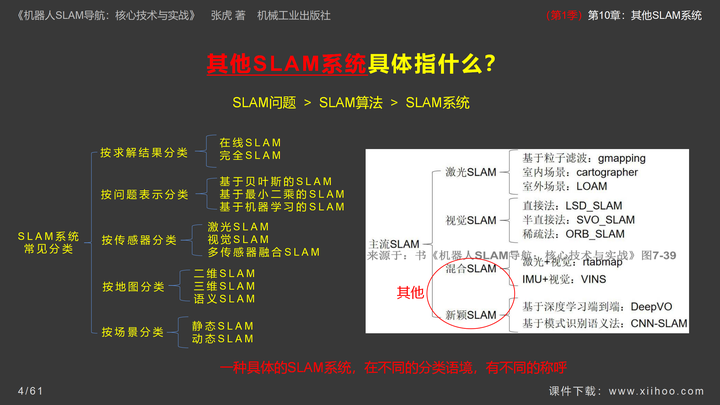
《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统
- 先 导 课
- 第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
- 第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
- 第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
- 答 疑 课












- Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
《机器人SLAM导航核心技术与实战》第1季:第10章_其他SLAM系统的更多相关文章
- 《机器人SLAM导航核心技术与实战》第1季:第4章_机器人传感器
<机器人SLAM导航核心技术与实战>第1季:第4章_机器人传感器 视频讲解 [第1季]4.第4章_机器人传感器-视频讲解 [第1季]4.1.第4章_机器人传感器_惯性测量单元-视频讲解 [ ...
- 《 .NET并发编程实战》阅读指南 - 第10章
先发表生成URL以印在书里面.等书籍正式出版销售后会公开内容.
- RViz 实时观测机器人建立导航2D封闭空间地图过程 (SLAM) ----27
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ ROS提供了非常强大的图形化模拟环境 RViz,这个 RViz 能做的事情非常多.今天我们学习一下如何使 ...
- SLAM+语音机器人DIY系列:(一)Linux基础——2.安装Linux发行版ubuntu系统
摘要 由于机器人SLAM.自动导航.语音交互这一系列算法都在机器人操作系统ROS中有很好的支持,所以后续的章节中都会使用ROS来组织构建代码:而ROS又是安装在Linux发行版ubuntu系统之上的, ...
- 除了ROS, 机器人定位导航还有其他方案吗?
利用ROS进行机器人开发,我想大多数企业是想借助ROS实现机器人的导航.定位与路径规划,它的出现大大降低了机器人领域的开发门槛,开发者无需向前人一样走众多弯路,掌握多种知识才能开始实现机器人设计的梦想 ...
- Elasticsearch核心技术与实战-学习笔记
学习资源: Elasticsearch中文社区日报https://elasticsearch.cn/article/ Elasticsearch 官网 https://www.elastic.co/ ...
- Kafka核心技术与实战,分布式的高性能消息引擎服务
Kafka是LinkedIn开发并开源的一套分布式的高性能消息引擎服务,是大数据时代数据管道技术的首选. 如今的Kafka集消息系统.存储系统和流式处理平台于一身,并作为连接着各种业务前台和数据后台的 ...
- Elasticsearch核心技术与实战,性能是真牛
Elasticsearch 是一款非常强大的开源搜索及分析引擎.结合 Kibana.Logstash和Beats,Elasticsearch 还被广泛运用在大数据近实时分析,包括日志分析.指标监控.信 ...
- .NET Core实战项目之CMS 第十三章 开发篇-在MVC项目结构介绍及应用第三方UI
作为后端开发的我来说,前端表示真心玩不转,你如果让我微调一个位置的样式的话还行,但是让我写一个很漂亮的后台的话,真心做不到,所以我一般会选择套用一些开源UI模板来进行系统UI的设计.那如何套用呢?今天 ...
- php CI 实战教程第一季百度经验杂志
phpCI实战教程第一季_百度经验杂志_百度经验http://jingyan.baidu.com/magazine/16428 杂志为本人php CI实战教程系列经验 从实际项目使用中写系列实战经验, ...
随机推荐
- 《C++并发编程实战》读书笔记(2):线程间共享数据
1.使用互斥量 在C++中,我们通过构造std::mutex的实例来创建互斥量,调用成员函数lock()对其加锁,调用unlock()解锁.但通常更推荐的做法是使用标准库提供的类模板std::lock ...
- 中国最难入职的IT公司排行榜
在IT行业竞争日益白热化的今天,头部企业的招聘门槛不断刷新求职者的认知.根据最新行业调研和招聘数据,我们整理出2025年中国最难入职的几家互联网公司,并揭秘其背后严苛的选拔逻辑. 通常衡量难不难,会从 ...
- 安全稳定地远程访问飞牛NAS
春节前从一个网友那里了解到一个新的NAS--飞牛. 起因是我们一个用户用我们的SD-WAN来远程访问飞牛NAS,市面上做NAS的很多,之所以单独体验这个产品主要是: 不需要购买硬件,这个是非常重要的, ...
- 大模型工具KTransformer的安装
技术背景 前面写过几篇关于DeepSeek的文章,里面包含了通过Ollama来加载模型,以及通过llama.cpp来量化模型(实际上Llama.cpp也可以用来加载模型,功能类似于Ollama).这里 ...
- 洛谷B4038 [GESP202409 三级] 平衡序列 题解
原题传送门 前言 当我以一种十分激动的心情参加了GESP的2024-9的三级考试时. 打开了此题,然后--自以为是的拿着暴力一顿乱写!然后TLE. 直到结束我还是没有想出来! (太菜了!!!) 以一种 ...
- Linux Vim 最全面教程:从入门到精通
一.引言 Vim 是一款功能强大且在 Linux 系统中广泛使用的文本编辑器.它有着高效的编辑模式.丰富的快捷键以及众多强大的功能,对于想要深入学习 Linux 系统操作以及进行文本处理相关工作的新手 ...
- P4688 [Ynoi Easy Round 2016] 掉进兔子洞
莫队可以维护种类数 但是无法维护出现次数 考虑离散化以后我们后面腾出了一些空位 那么我们就可以填进那些坑里面 这样做我们就可以用 bitset 直接做与运算 那么 莫队 + bitset 即可
- 读论文-新闻推荐系统:近期进展、挑战与机遇的评述(News recommender system_ a review of recent progress, challenges, and opportunities)
前言 今天读的论文为一篇于2022年发表在"人工智能评论"(Artificial Intelligence Review)的论文,文章主要强调了NRS面临的主要挑战,并从现有技术中 ...
- ragflow-ollama 知识库建立测试
ollama查看模型 C:\Users\DK>ollama show deepseek-r1:7b Model architecture qwen2 parameters 7.6B contex ...
- 豆包:php如何模拟多客户端访问服务器
在 PHP 中模拟多客户端访问服务器可以通过以下几种方式实现,具体方法根据需求选择: 方法 1:使用 cURL 多请求(Multi Handle) 通过 curl_multi_* 系列函数实现并发 ...