4412 移植mpu9250尝试
4412的板子IO都是1.8v的。只有I2C6是用了电平转换到了3.3v。所以我准备使用I2C6来驱动mpu9250
一、首先去掉占用的模块
menuconfig中去掉触摸的驱动
- Device Drivers --->
- Input device support --->
- Touchscreens --->
- FT5X0X based touchscreens(去掉)
然后是去掉RC522的驱动(SPI占用I2C了)
- Device Drivers --->
- SPI support --->
- < > RC522 Module driver support(去掉)
-> Networking support (NET [=y])
-> CAN bus subsystem support (CAN [=y])
-> CAN Device Drivers
-> Platform CAN drivers with Netlink support (CAN_DEV [=y])
< > Microchip MCP251x SPI CAN controllers
二、在mach-itop4412.c中添加设备
static struct i2c_board_info i2c_devs6[] __initdata = {
{
I2C_BOARD_INFO("mpu9250", MPU9250_ADDRESS),
},
};
这里的MPU9250_ADDRESS应该是7位的,如果写0XD0,就是MPU9250_ADDRESS>>1
然后内核编译后,烧录进开发板
cat /sys/bus/i2c/devices下就会有6-0068,这个文件了
写了一个空的I2C模版:
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/i2c.h>
#include <linux/input.h>
#include <linux/delay.h>
#include <linux/slab.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/gpio.h>
#include <linux/platform_device.h> #include <linux/regulator/consumer.h> #include <mach/gpio.h>
#include <plat/gpio-cfg.h>
#include <plat/ft5x0x_touch.h> #define I2C6_9250_NAME "mpu9250" #define I2C_SDA6 EXYNOS4_GPC1(3)
#define I2C_SCL6 EXYNOS4_GPC1(4) static int i2c_mpu9250_probe(struct i2c_client *client, const struct i2c_device_id *id)
{
printk("==%s: \n", __FUNCTION__);
return ;
} static int __devexit i2c_mpu9250_remove(struct i2c_client *client)
{
i2c_set_clientdata(client, NULL); //设置client为NULL
printk("==%s: \n", __FUNCTION__);
return ;
} static const struct i2c_device_id i2c_mpu9250_id[] = {
{ I2C6_9250_NAME, },
{ }
}; static struct i2c_driver i2c_mpu9250_driver = {
.probe = i2c_mpu9250_probe,
.remove = __devexit_p(i2c_mpu9250_remove),
.id_table = i2c_mpu9250_id,
.driver = {
.name = I2C6_9250_NAME,
.owner = THIS_MODULE,
},
}; static void i2c_io_init()
{
int ret;
ret = gpio_request(I2C_SCL6, "I2C_SCL6");
if(ret) {
printk(KERN_ERR "failed to request TP1_EN for I2C control\n");
} gpio_direction_output(I2C_SCL6, );
s3c_gpio_cfgpin(I2C_SCL6, S3C_GPIO_OUTPUT);
gpio_free(I2C_SCL6); mdelay(); ret = gpio_request(I2C_SDA6, "I2C_SDA6");
if(ret) {
gpio_free(I2C_SDA6); ret = gpio_request(I2C_SDA6, "I2C_SDA6");
if(ret) {
printk("i2c_io_test: Fialed to request I2C_SDA6 \n");
}
}
gpio_direction_output(I2C_SDA6, );
mdelay(); gpio_direction_output(I2C_SDA6, ); s3c_gpio_cfgpin(I2C_SDA6, S3C_GPIO_OUTPUT);
gpio_free(I2C_SDA6);
msleep();
printk("==%s: \n", __FUNCTION__);
} static int __init i2c_mpu9250_init(void)
{
printk("==%s: \n", __FUNCTION__);
i2c_io_init();
return i2c_add_driver(&i2c_mpu9250_driver);
} static void __exit i2c_mpu9250_exit(void)
{
printk("==%s: \n", __FUNCTION__);
i2c_del_driver(&i2c_mpu9250_driver);
} late_initcall(i2c_mpu9250_init); //延迟加载
module_exit(i2c_mpu9250_exit); MODULE_LICENSE("GPL");
MODULE_DESCRIPTION("mpu9250");
MODULE_AUTHOR("ChenTuo");
i2c_9250.c
三、I2C架构层次分类
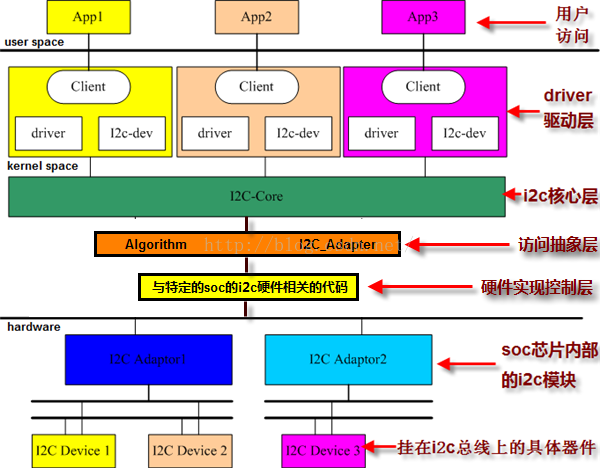
- 第一层:提供i2c adapter的硬件驱动,探测、初始化i2c adapter(如申请i2c的io地址和中断号),驱动soc控制的i2c adapter在硬件上产生信号(start、stop、ack)以及处理i2c中断。覆盖图中的硬件实现层
- 第二层:提供i2c adapter的algorithm,用具体适配器的xxx_xferf()函数来填充i2c_algorithm的master_xfer函数指针,并把赋值后的i2c_algorithm再赋值给i2c_adapter的algo指针。覆盖图中的访问抽象层、i2c核心层
- 第三层:实现i2c设备驱动中的i2c_driver接口,用具体的i2c device设备的attach_adapter()、detach_adapter()方法赋值给i2c_driver的成员函数指针。实现设备device与总线(或者叫adapter)的挂接。覆盖图中的driver驱动层
- 第四层:实现i2c设备所对应的具体device的驱动,i2c_driver只是实现设备与总线的挂接,而挂接在总线上的设备则是千差万别的,所以要实现具体设备device的write()、read()、ioctl()等方法,赋值给file_operations,然后注册字符设备(多数是字符设备)。覆盖图中的driver驱动层。
- --------------------- 本文来自 zqixiao_09 的CSDN 博客 ,全文地址请点击:https://blog.csdn.net/zqixiao_09/article/details/50916916?utm_source=copy
四、Linux下I2C驱动体系结构三部分详细分析
4.1 IIC核心
IIC核心提供了IIC总线驱动和设别驱动的注册、注销方法。在LInux驱动的I2C文件夹下有alogs,busses,chips三个文件夹,另外还有i2c-core.c和i2c-dev.c两个文件。
4.2 IIC总线驱动
IIC总线驱动是对IIC硬件的,适配器可由CPU控制,IIC直接集成在CPU内部。IIC驱动包括IIC适配器数据结构体i2c_adapter、IIC适配器的algorithm数据结构i2c-algorithm和控制器产生通信信号的函数。i2c_algorithm里有iic_xfer就是i2c的低层读写实现。
4.3 IIC设备驱动
IIC设备驱动主要包含了数据结构i2c_driver和i2c_client,我们需要根据具体设备实现其中的成员函数。
i2c-dev.c文件中实现了I2Cdriver,包括实现open,release,read,write以及ioctl等标准文件操作的接口函数。
通过I2Cdriver提供的通用方法可以访问任何一个I2C设备。
五、一些相关的数据结构
i2c_msg:
struct i2c_msg {
__u16 addr; /* slave address */
__u16 flags;
#define I2C_M_TEN 0x0010 /* this is a ten bit chip address */
#define I2C_M_RD 0x0001 /* read data, from slave to master */
#define I2C_M_NOSTART 0x4000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_REV_DIR_ADDR 0x2000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_IGNORE_NAK 0x1000 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_NO_RD_ACK 0x0800 /* if I2C_FUNC_PROTOCOL_MANGLING */
#define I2C_M_RECV_LEN 0x0400 /* length will be first received byte */
__u16 len; /* msg length */
__u8 *buf; /* pointer to msg data */
};
struct i2c_msg
I2C_M_TEN:I2C默认就是8位的,如果i2c_msg的flags没有配置I2C_M_TEN的话
I2C_M_RD:标识这是一个读操作
I2C_M_NOSTART:没有起始位
I2C_M_REV_DIR_ADDR:读写标识位反转
I2C_M_IGNORE_NAK:忽略ACK和NACK
I2C_M_NO_RD_ACK:读时忽略ACK
4412 移植mpu9250尝试的更多相关文章
- 4412 移植x264并且YUV422转x264
转自http://blog.sina.com.cn/s/blog_af9acfc60101alxx.html 一.YUV422转换规律 做视频采集与处理,自然少不了要学会分析YUV数据.因为从采集的角 ...
- u-boot移植初步尝试-tiny4412
获取u-boot源代码 在u-boot官方网站下载uboot源码.ftp://ftp.denx.de/pub/u-boot/ 因为是第一次移植uboot,所以这里选的版本是 u-boot-2013.0 ...
- backports移植rtlwifi驱动
/************************************************************************ * backports移植rtlwifi驱动 * 说 ...
- STM32 OSAL操作系统抽象层的移植
文章目录 什么是 OSAL? 源码安装 Linux 上OSAL的移植 STM32上OSAL的移植 关键点 测试代码 结语 附件 什么是 OSAL? 今天同学忽然问我有没有搞过OSAL,忽然间一头雾水, ...
- Effective Java 第三版—— 84. 不要依赖线程调度器
Tips 书中的源代码地址:https://github.com/jbloch/effective-java-3e-source-code 注意,书中的有些代码里方法是基于Java 9 API中的,所 ...
- Qt5.7.0移植到4412
搞了几天,终于把Qt5.7移植到4412上,下面是一些自己移植过程中的记录,希望能帮到其他人. 一.需要下载的文件, 下载qt5.7源码qt-everywhere-opensource-src-5.7 ...
- 关于当一个C#工程移植到另一台机子上(win7)上时,程序报错。dll没有被指定在Windows上运行,或者它包含错误。请尝试使用原始安装媒体重新安装程序。。。。。。
, 解决方法:通过从网上重新下载dll文件 拷贝到报错的目录下,替换掉原有的dll,可以正确运行.
- qt5.5.1 移植4412的问题过程
1.编译错误: ../WTF/wtf/unicode/wchar/UnicodeWchar.h: In function 'bool WTF::Unicode::isAlphanumeric(UCha ...
- 【4412嵌入式开发板学习笔记】认识uboot
转自迅为讨论群:http://www.topeetboard.com 重要说明:这份笔记不是4412开发配套的,是我在网上看视频的时候下载上课老师的笔记后修改的.所以我试了一下笔记上的uboot命令, ...
随机推荐
- PHP之导出CSV文件
序言 Q1:什么是csv文件? A1:csv即 comma-separated values ,逗号分隔值.是一种通用的相对简单地文件格式,目前被较为广泛的使用.其最广泛的应用就是用来转移表数据. “ ...
- ora4031
http://blog.itpub.net/23135684/viewspace-1203447/ Mon Sep 11 08:56:10 2017Errors in file /oracle/db/ ...
- java 虚方法。 后面new 那个类, 就调用哪个类的方法 ,而非定义类的方案。 关于父子 类的 呵呵
java 虚方法. 后面new 那个类, 就调用哪个类的方法 ,而非定义类的方案. 关于父子 类的 呵呵 在多态的情况下,声明为父类类型的引用变量只能调用父类中的方法,但如果此变量 ...
- 《STL源码剖析》——第一、二、三章
第一章:概论: 换句话说,STL所实现的,是依据泛型思维架设起来的一个概念结构.这个以抽象概念(abstract concepts)为主体而非以实际类(classes)为主体的结构,形成了一个严谨的 ...
- TP 验证码
TP自带验证码类Verify.class.php 生成验证码 public function verify_c(){ session_start(); ob_clean(); $Verify = ne ...
- java的spi(Service Provider Interface)机制及源码(java8)
1.什么是java的spi spi 全称为 service provider interface 即 服务提供接口,用来作为服务的扩展发现.在运行时动态添加接口的实现,是对接口的实现类的创建管理. 2 ...
- [Codeforces 639F] Bear and Chemistry (Tarjan+虚树)(有详细注释)
[Codeforces 639F] Bear and Chemistry(Tarjan+虚树) 题面 给出一个n个点,m条边的无向图(不保证连通,可能有自环和重边),有q次询问,每次询问给出p个点和q ...
- [HDU5807] [BestCoder Round #86 1004] Keep In Touch (DP)
[HDU5807] [BestCoder Round #86 1004] Keep In Touch (DP) 题面 有三个人从一张N个点无重边的有向无环图上的三个点出发,每单位时间,他们分别选择当前 ...
- python-MySQL数据库--- 基础篇
MySQL数据库基础 数据库系统(database system) 1.数据库系统(database system) 数据库系统是计算机系统中一种专门管理数组资源的系统,数据库存储的是 ...
- 57-python基础-python3-集合-集合常用方法-添加元素-add()-update()
添加元素-add()-update() 1-add() add()用于增加一个元素值,原值修改,无返回值. 2-update()用于添加一个可迭代的对象,原值修改,无返回值. 下面依次向集合添加可迭代 ...