ROS探索总结(四)——简单的机器人仿真
前边我们已经介绍了ROS的基本情况,以及新手入门ROS的初级教程,现在就要真正的使用ROS进入机器人世界了。接下来我们涉及到的很多例程都是《ROS by Example》这本书的内容,我是和群里的几个人一起从国外的亚马逊上买到的,还是很有参考价值的,不过前提是你已经熟悉之前的新手教程了。
一、ROS by Example
- svn checkout http://ros-by-example.googlecode.com/svn/trunk/rbx_vol_1
- rosmake rbx_vol_1
- rospack profile //加入ROS package路径
二、rviz简单机器人模拟
1、安装机器人模拟器
- svn checkout http://vanadium-ros-pkg.googlecode.com/svn/trunk/arbotix
- rosmake arbotix
2、TurtleBot机器人的模拟
机器人模拟运行:
- roscore
- roslaunch rbx1_bringup fake_pi_robot.launch
- rosrun rviz rviz -d `rospack find rbx1_nav`/sim_fuerte.vcg
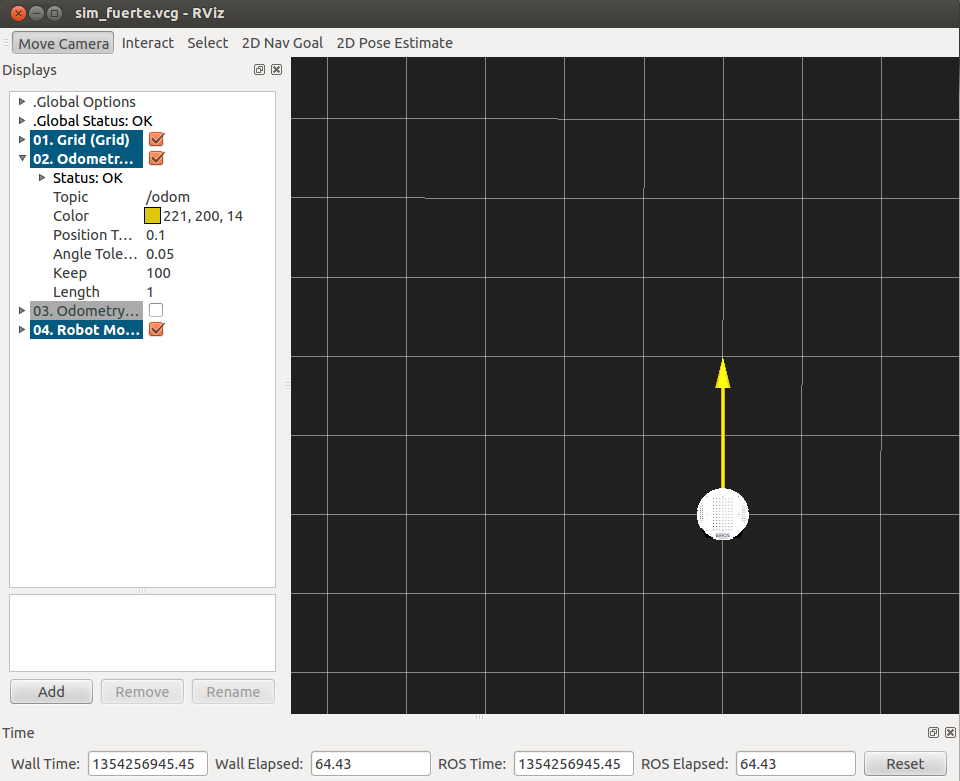
此时的机器人是静止的,需要发布一个消息才能让它动起来。
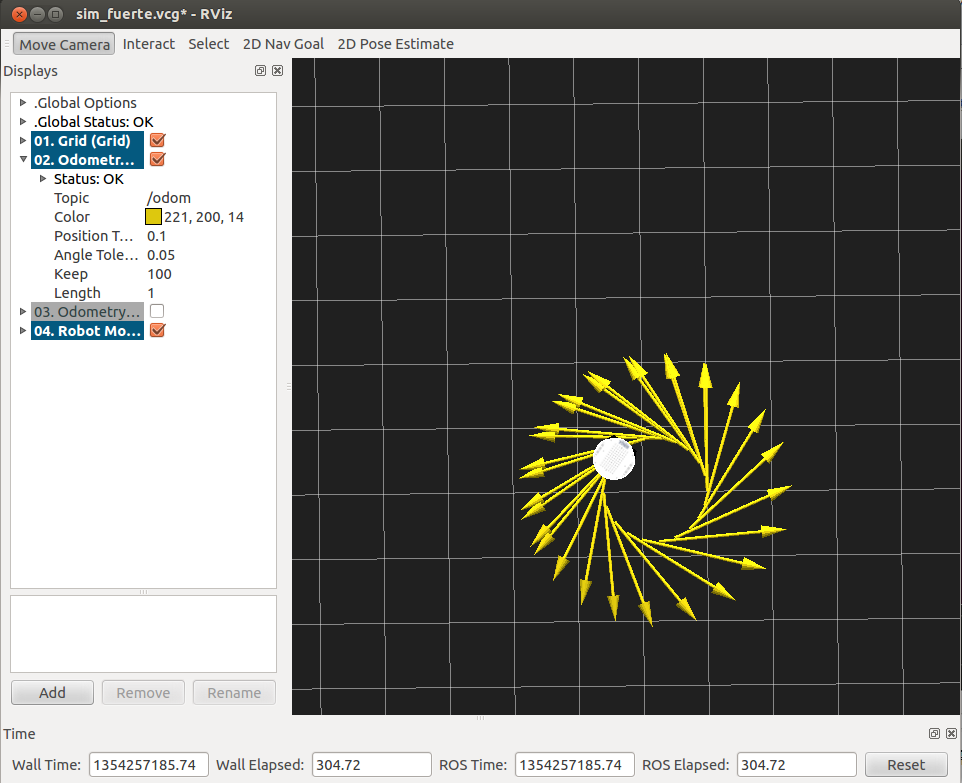
- rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
- rostopic pub -1 /cmd_vel geometry_msgs/Twist '{}'
三、实现分析
1、TurtleBot机器人运行
- <launch>
- <param name="/use_sim_time" value="false" />
- <!-- Load the URDF/Xacro model of our robot -->
- <arg name="urdf_file" default="$(find xacro)/xacro.py '$(find turtlebot_description)/urdf/turtlebot.urdf.xacro'" />
- <param name="robot_description" command="$(arg urdf_file)" />
- <node name="arbotix" pkg="arbotix_python" type="driver.py" output="screen">
- <rosparam file="$(find rbx1_bringup)/config/fake_turtlebot_arbotix.yaml" command="load" />
- <param name="sim" value="true"/>
- </node>
- <node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher">
- <param name="publish_frequency" type="double" value="20.0" />
- </node>
- <!-- We need a static transforms for the wheels -->
- <node pkg="tf" type="static_transform_publisher" name="odom_left_wheel_broadcaster" args="0 0 0 0 0 0 /base_link /left_wheel_link 100" />
- <node pkg="tf" type="static_transform_publisher" name="odom_right_wheel_broadcaster" args="0 0 0 0 0 0 /base_link /right_wheel_link 100" />
- </launch>
(1) 从指定的包中加载urdf文件
(2) 启动arbotix模拟器
(3) 启动状态发布节点
(4) tf坐标系配置
2、rviz配置文件
- Background\ ColorB=0.12549
- Background\ ColorG=0.12549
- Background\ ColorR=0.12549
- Camera\ Config=158.108 0.814789 0.619682 -1.57034
- Camera\ Type=rviz::FixedOrientationOrthoViewController
- Fixed\ Frame=/odom
- Grid.Alpha=0.5
- Grid.Cell\ Size=0.5
- Grid.ColorB=0.941176
- Grid.ColorG=0.941176
- Grid.ColorR=0.941176
- Grid.Enabled=1
- Grid.Line\ Style=0
- Grid.Line\ Width=0.03
- Grid.Normal\ Cell\ Count=0
- Grid.OffsetX=0
- Grid.OffsetY=0
- Grid.OffsetZ=0
- Grid.Plane=0
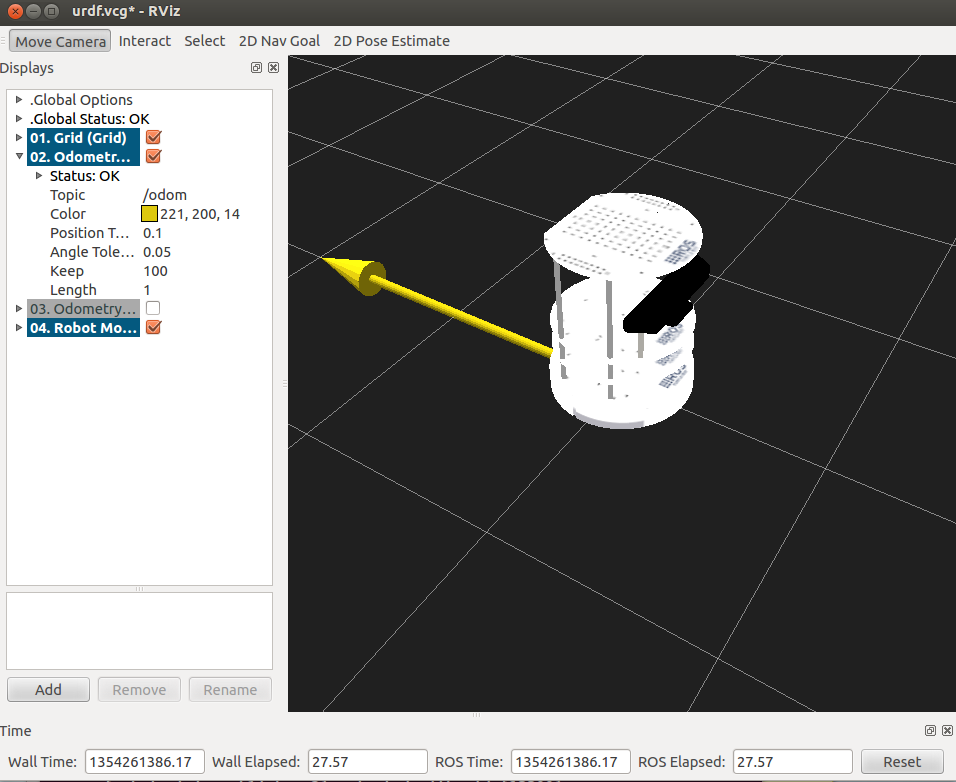
上面的代码是配置背景颜色和网格属性的,对应rviz中的选项如下图所示。
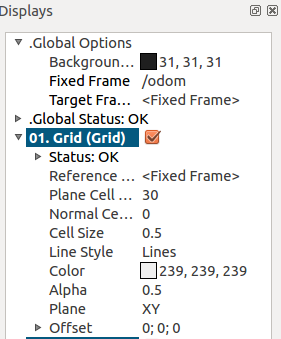
其中比较重要的一个选项是Camera的type,这个选项是控制开发者的观察角度的,书中用的是FixedOrientationOrthoViewController的方式,就是上面图中的俯视角度,无法看到机器人的三维全景,所以可以改为OrbitViewController方式,如下图所示:
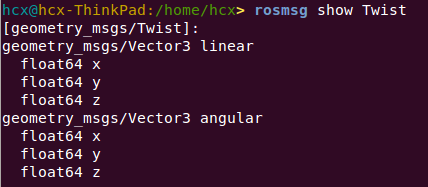
3、发布topic
这里的topic就是速度命令,针对这个topic,我们需要发布速度的信息,在ROS中已经为我们写好了一些可用的数据结构,这里用的是Twist信息的数据结构。在终端中可以看到Twist的结构如下:
- Background\ ColorB=0.12549
- Background\ ColorG=0.12549
- Background\ ColorR=0.12549
- Camera\ Config=158.108 0.814789 0.619682 -1.57034
- Camera\ Type=rviz::FixedOrientationOrthoViewController
- Fixed\ Frame=/odom
- Grid.Alpha=0.5
- Grid.Cell\ Size=0.5
- Grid.ColorB=0.941176
- Grid.ColorG=0.941176
- Grid.ColorR=0.941176
- Grid.Enabled=1
- Grid.Line\ Style=0
- Grid.Line\ Width=0.03
- Grid.Normal\ Cell\ Count=0
- Grid.OffsetX=0
- Grid.OffsetY=0
- Grid.OffsetZ=0
- Grid.Plane=0
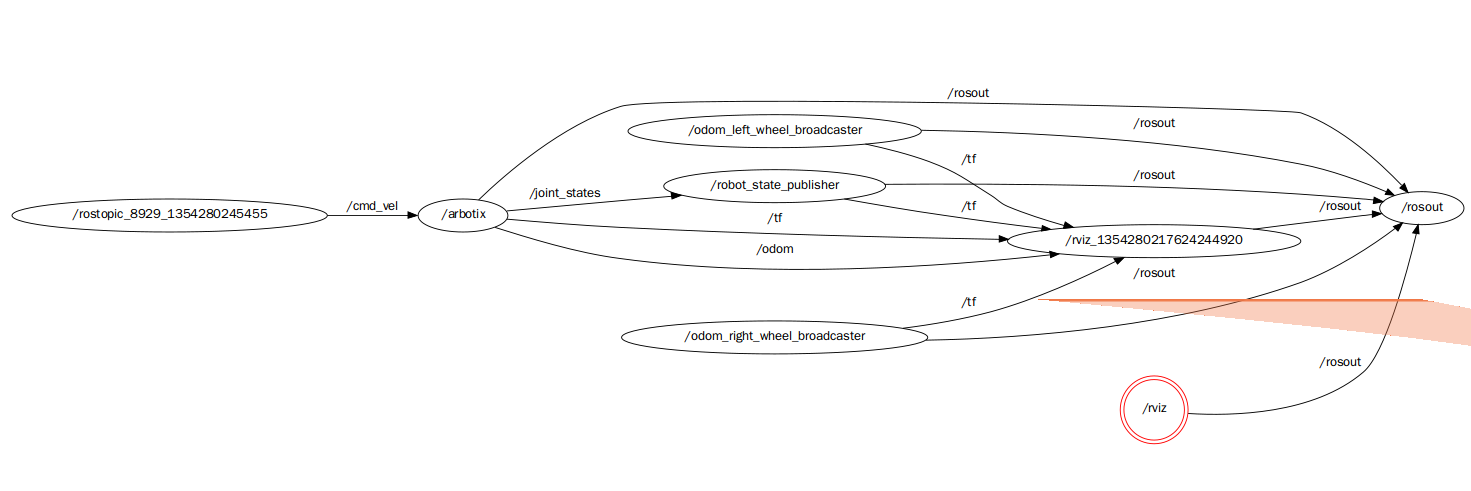
4、节点关系图
----------------------------------------------------------------
欢迎大家转载我的文章。
转载请注明:转自古-月
欢迎继续关注我的博客
ROS探索总结(四)——简单的机器人仿真的更多相关文章
- Robot Operating System (ROS)学习笔记---创建简单的机器人模型smartcar
搭建环境:XMWare Ubuntu14.04 ROS(indigo) 转载自古月居 转载连接:http://www.guyuehome.com/243 一.创建硬件描述包 已创建catkin_ ...
- ROS探索总结(五)——创建简单的机器人模型smartcar
前面我们使用的是已有的机器人模型进行仿真,这一节我们将建立一个简单的智能车机器人smartcar,为后面建立复杂机器人打下基础. 一.创建硬件描述包 roscreat-pkg smartcar_de ...
- ROS和Gazebo进行机器人仿真(一)
Gazebo是一种多机器人仿真器,可用于室内外机器人仿真.Gazebo在ROS中有良好的接口,包含ROS和Gazebo的所有控制. 若要实现ROS到Gazebo的通信,我们必须安装ROS-Gazebo ...
- 【kinetic】操作系统探索总结(五)创建简单的机器人模型smartcar
p { margin-bottom: 0.1in; direction: ltr; line-height: 120%; text-align: justify } a:link { color: r ...
- ROS探索总结(十七)——构建完整的机器人应用系统
上一篇博客介绍了HRMRP机器人平台的设计,基于该平台,可以完成丰富的机器人应用,以较为典型的机器人导航为例,如何使用HRMRP来完成相应的功能?本篇博客将详细介绍如何将HRMRP应用到 ...
- ROS探索总结(一)——ROS简介
转自古-月 ROS探索总结(一)——ROS简介 一.历史 随着机器人领域的快速发展和复杂化,代码的复用性和模块化的需求原来越强烈,而已有的开源机器人系统又不能很好的适应需求.2010年Willow G ...
- 机器人与机器人仿真技术(zz)
http://www.viblue.com/archives/5587.htm 一.机器人简介: 机器人(Robot)是自动执行工作的机器装置.它既可以接受人类指挥,又可以运行预先编排的程序,也可以根 ...
- ROS系统MoveIt玩转双臂机器人系列(一)
一.ROS系统的MoveIt模块简介 机器人操作系统ROS目前最受关注的两个模块是导航(Navigation)和机械臂控制(MoveIt!),其中,机械臂控制模块(后面简称MoveIt)可以让用户快速 ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
随机推荐
- Linux系统调用分析
在HelloWorld程序中,我们可以调用libc中的getpid函数获取当前进程的进程号.HelloWorld是运行在用户空间,那么它是如何通过系统调用切换到内核空间来获取PID的呢?原来,在uni ...
- IaaS中的统一存储:从设计到实现
转自:https://www.ustack.com/blog/tycc/ “原生的OpenStack并不支持统一存储,云主机服务Nova.镜像服务Glance.云硬盘服务Cinder的后端存储各不相同 ...
- java关键字---final和transient
首先,说说final. final关键字可以修饰变量,方法,类. final变量: 需求: 1 需要一个永不改变的编译时常量 2 ...
- MBA 工商管理课程-风险型决策方法
(二)风险型决策方法 适用的条件 未来情况不止一种,管理者不知道到底哪种情况会发生,但知道每种情况发生的概率 常用方法: ...
- python数据类型、操作符
python中数据类型包含:int,float,boolean,string,list(列表),set(集合),dictionary(字典) 数据类型转换: ①字符串 转 int:>>&g ...
- php操作EXCLE(通过phpExcle实现读excel数据)
<?phprequire_once('/PHPExcel/Reader/Excel2007.php');$objReader = new PHPExcel_Reader_Excel2007;$P ...
- CANopenSocket CANopenCommand.c hacking
/***************************************************************************** * CANopenSocket CANop ...
- 反编译(javap)操作和可视化界面
1.反编译(javap)操作和可视化界面 演示:
- LeetCode 336. Palindrome Pairs
原题链接在这里:https://leetcode.com/problems/palindrome-pairs/ 题目: Given a list of unique words, find all p ...
- 使用virtualenv搭建python3的环境
转:http://blog.csdn.net/liuchunming033/article/details/46008301 转:http://www.jb51.net/article/85527.h ...