奥比中光Astra Pro在ROS系统中的使用
奥比中光Astra Pro在ROS系统中的使用
上一次介绍了Astra Pro在ubuntu中的使用,由于Astra Pro使用uvc传输彩色图像,所以当用rqt_image_view窗口
时,看不到彩色图。需要安装libuvc和libuvc_ros。
安装ROS功能包
sudo apt-get install ros-kinetic-astra-camera ros-kinetic-astra-launch
使用命令
roslaunch astra_launch astra.luanch
- libuvc的安装
cd ~
git clone https://github.com/ktossell/libuvc
cd libuvc
mkdir build
cd build
cmake ..
make && sudo make install
- libuvc_ros的安装
cd ~/catkin_ws/src
git clone https://github.com/ktossell/libuvc_ros
cd ..
catkin_make
- 编译错误及解决办法

提示找不到JpegPkg这个库。
我换回了旧版本的linuvc和libuvc_ros安装包,解决了这个问题。下载地址:
https://i.cnblogs.com/Files.aspx
先安装linuvc,按照上面的命令

安装linuvc_ros,按照上面的命令
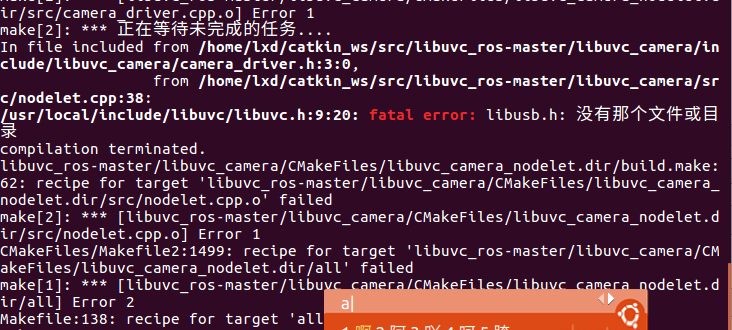
提示找不到头文件,没有libusb.h ,执行命令
sudo cp /usr/include/libusb-1.0/libusb.h /usr/local/include/libuvc/
修改权限
sudo nautilus
修改usr/local/include/libuvc/libuvc.h文件,在libusb.h前面加上libuvc,写好直接复制进去

重新编译,通过

- 测试
启动
roscore
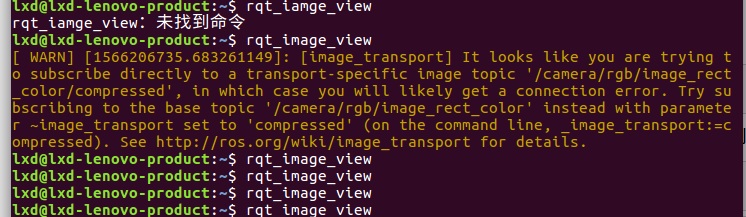
使用rosrun,注意要把ROS工作空间的环境变量添加到当前终端,不然会提示找不到libuvc_camera包
rosrun libuvc_camera camera_node
当前终端添加
cd catkin_make
source devel/setup.bash
echo $ROS_PACKAGE_PATH 所有终端
echo :source/WORKSPACE/devel/setup.bash">>~/.bashrc
WORKSPACE为工作空间的路径

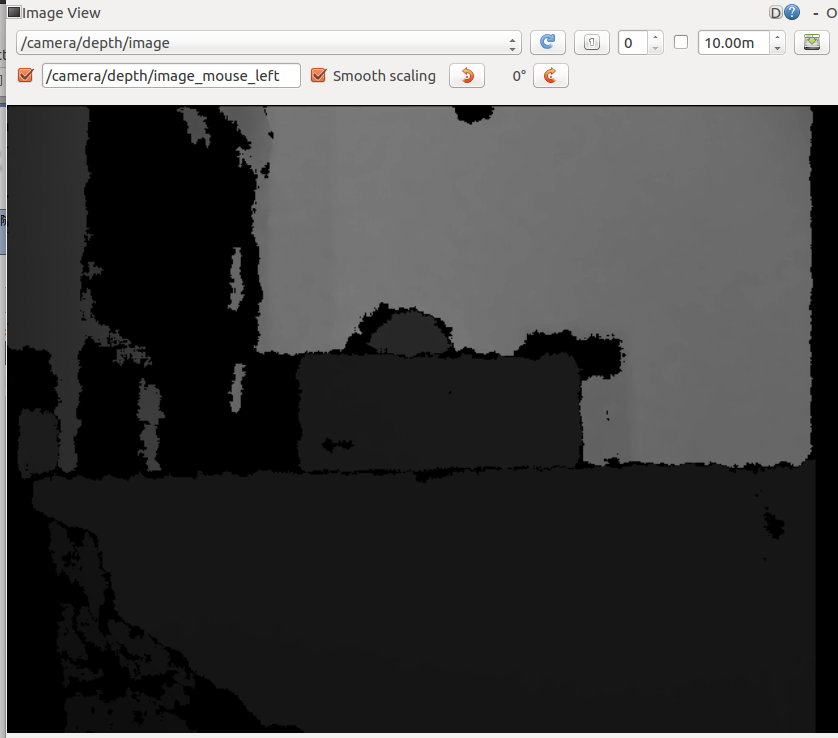
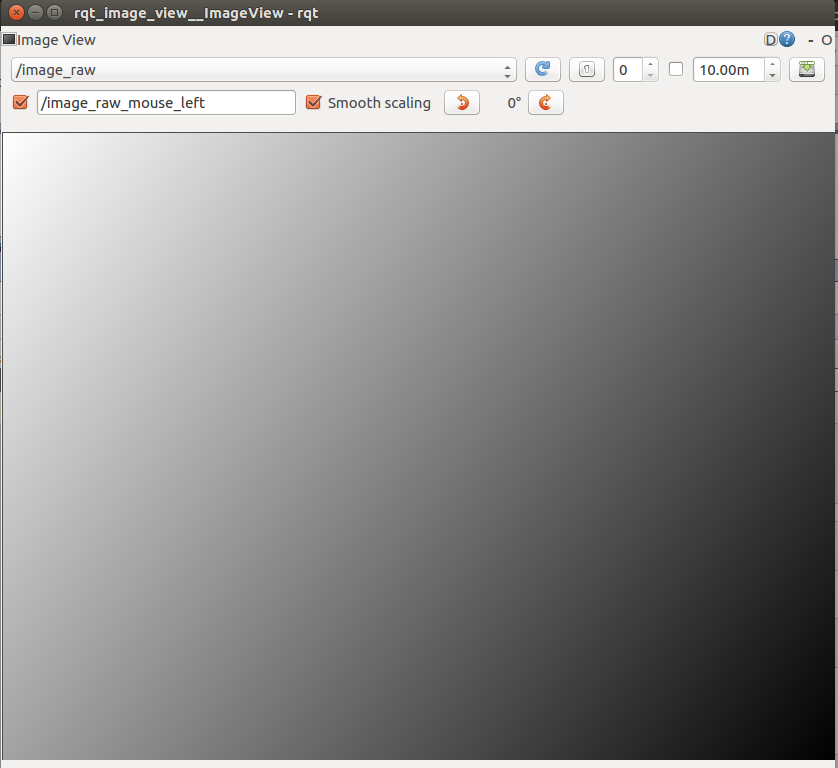
运行
rqt_image_view
成功!
参考https://blog.csdn.net/zhangrelay/article/details/53515859#commentsedit
https://www.cnblogs.com/li-yao7758258/p/11234864.html
奥比中光Astra Pro在ROS系统中的使用的更多相关文章
- 奥比中光Astra Pro的使用(1)
在ubuntu上的使用 首先下载SDK以及OpenNI安装包,下载地址: 解压两个安装包 切换目录到AstraSDK-Linux下的install目录,并输入命令:sudo sh ./install. ...
- 熟悉ROS系统中的话题
描述:这篇教程主要讲解ROS系统中的话题及rostopic和rqt_plot等命令工具: 1. Setup安装1.1 roscore 首先确保roscore已经启动运行,打开一个新的命令终端,输入如下 ...
- ROS系统python代码测试之rostest
ROS系统中提供了测试框架,可以实现python/c++代码的单元测试,python和C++通过不同的方式实现, 之后的两篇文档分别详细介绍各自的实现步骤,以及测试结果和覆盖率的获取. ROS系统中p ...
- SLAM+语音机器人DIY系列:(二)ROS入门——2.ROS系统整体架构
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- ROS学习笔记二:ROS系统架构及概念
本文主要是了解ROS的系统架构.文件夹结构以及工作所需的核心文件. ROS系统架构主要被设计和划分为三部分,每一部分代表一个层级的概念:文件系统级(The filesystem level).计算图级 ...
- 【转载】ROS系统整体架构
目录 1.从文件系统级理解 2.从计算图级理解 3.从开源社区级理解 由于ROS系统的组织架构比较复杂,简单从一个方面来说明很难说清楚.按照ROS官方的说法,我们可以从3个方面来理解ROS系统整体架构 ...
- ROS-2 : ROS系统层级结构
一.ROS文件系统层级 ROS的文件和文件夹按如下层级来组织:
- 奥比中光Orbbec Astra Pro RGBD 3D视觉传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示
Orbbec Astra Pro传感器在ROS(indigo和kinetic)使用说明 rgb depth同时显示 这款摄像头使用uvc输入彩色信息,需要libuvc和libuvc_ros这样才能在R ...
- 在ROS(indigo)中读取手机GPS用于机器人定位~GPS2BT在ubuntu和window系统下的使用方法~
在ROS(indigo)中读取手机GPS用于机器人定位~GPS2BT在ubuntu和window系统下的使用方法~ 不需要额外购买GPS设备. 将手机GPS数据通过蓝牙传输给计算机使用,当然通过类似方 ...
随机推荐
- python深浅copy
预备知识一——python的变量及其存储 在详细的了解python中赋值.copy和deepcopy之前,了解一下python内存中变量的存储情况. 在高级语言中,变量是对内存及其地址的抽象.对于py ...
- CNN简略总结
https://blog.csdn.net/real_myth/article/details/51824193 池化层的作用: 感受野变化...?? 1*1卷积核的作用 1. 实现跨通道的交互和信息 ...
- 【leetcode】1252. Cells with Odd Values in a Matrix
题目如下: Given n and m which are the dimensions of a matrix initialized by zeros and given an array ind ...
- React native 之 图标库ECharts的使用
github地址:https://github.com/somonus/react-native-echarts 官网:https://www.echartsjs.com/zh/tutorial.ht ...
- [Linux系统] (7)Keepalived高可用
一.解决LVS server单点故障 如果集群中只有一台LVS server提供数据包分发服务,如果宕机,则会导致所有的业务重点,因为所有的请求都无法到达后面的Real server. 此时我们可以采 ...
- poj 2761 主席树的应用(查询区间第k小值)
Feed the dogs Time Limit: 6000MS Memory Limit: 65536K Total Submissions: 22084 Accepted: 7033 De ...
- Codeforces 1213E Two Small Strings
cf题面 中文题意 给个n,再给两个长度为2的字符串,要求构造一个长度为\(3n\)的字符串,a.b.c三个字母各n个,且构造出的字符串子串中不能出现给定的两个字符串.如果不存在这样的字符串,就输出N ...
- Spark 电子书
Spark最佳实践 (陈欢/林世飞著) 完整pdf扫描版[39MB]http://pan.baidu.com/s/1i4LNOVVSpark SQL编程指南 (Spark 官方文档翻译) 中文PDF版 ...
- linux crontab 定时任务,任务命令单独linux执行正常,放定时任务就不执行了,解决办法 (原)
这是我crontab里面的内容 */30 * * * * ./usr/bin/wget -q -O sync_log.txt http://fly.dllm.cn/index.php/Home/In ...
- DVWA--File Inclusion
0x01了解什么叫file inclusion File Inclusion,意思是文件包含(漏洞),是指当服务器开启allow_url_include选项时,就可以通过php的某些特性函数(incl ...