I2C驱动框架(三)
参考:I2C子系统之platform_device初始化——smdk2440_machine_init()
I2C驱动框架还应用了另一种总线-设备-驱动模型,平台设备总线platform_bus_type。内核已经注册好了平台总线,驱动程序只需向平台总线添加平台设备和平台驱动。这节主要介绍如何添加平台设备。
/*********"/arch/arm/mach-s3c64xx/mach-smdk6410.c"**********************/
//2./arch/arm/mach-s3c2440/mach-smdk2440.c中的函数:smdk2440_machine_init() arch_initcall级别
static void __init smdk6410_machine_init(void)
-->s3c_i2c0_set_platdata(NULL);
-->i2c_register_board_info(, i2c_devs0, ARRAY_SIZE(i2c_devs0));
-->i2c_register_board_info(, i2c_devs1, ARRAY_SIZE(i2c_devs1));
-->platform_add_devices(smdk6410_devices, ARRAY_SIZE(smdk6410_devices));
-->platform_device_register(&s3c_device_i2c0); /*注册平台设备*/
s3c_device_i2c0定义如下:
/*********"/arch/arm/plat-samsung/dev-i2c0.c"**********************/
static struct resource s3c_i2c_resource[] = {
[] = {
.start = S3C_PA_IIC,
.end = S3C_PA_IIC + SZ_4K - ,
.flags = IORESOURCE_MEM,
},
[] = {
.start = IRQ_IIC,
.end = IRQ_IIC,
.flags = IORESOURCE_IRQ,
},
};
/*
内核用adapter来表示主机,I2C驱动框架中的adapter就是指s3c6410的i2c控制器。
内核中通过platform_device来描述。具体如下:
*/
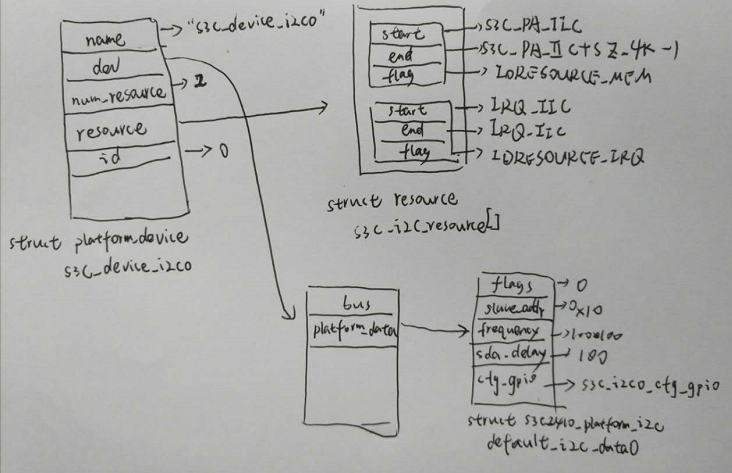
struct platform_device s3c_device_i2c0 = {
.name = "s3c2410-i2c",
.id = ,
.num_resources = ARRAY_SIZE(s3c_i2c_resource),
.resource = s3c_i2c_resource,
/*s3c_device_i2c0.dev.platform_data = &default_i2c_data0;*/
};
通过s3c_set_platdata(NULL)进一步设置s3c_device_i2c0的成员变量
static struct s3c2410_platform_i2c default_i2c_data0 __initdata = {
.flags = ,
.slave_addr = 0x10,
.frequency = *,
.sda_delay = ,
};
void s3c_i2c0_cfg_gpio(struct platform_device *dev)
{
s3c_gpio_cfgpin(S3C64XX_GPB(), S3C64XX_GPB5_I2C_SCL0);
s3c_gpio_cfgpin(S3C64XX_GPB(), S3C64XX_GPB6_I2C_SDA0);
s3c_gpio_setpull(S3C64XX_GPB(), S3C_GPIO_PULL_UP);
s3c_gpio_setpull(S3C64XX_GPB(), S3C_GPIO_PULL_UP);
}
void __init s3c_i2c0_set_platdata(struct s3c2410_platform_i2c *pd)
{
struct s3c2410_platform_i2c *npd;
if (!pd)
pd = &default_i2c_data0;
npd = kmemdup(pd, sizeof(struct s3c2410_platform_i2c), GFP_KERNEL);
if (!npd->cfg_gpio)
npd->cfg_gpio = s3c_i2c0_cfg_gpio;
s3c_device_i2c0.dev.platform_data = npd;
}
最后调用platform_device_register(&s3c_device_i2c0)注册平台设备,其中s3c_device_i2c0包含了s3c6410上i2c相关寄存器的地址,以及地址资源,还包括i2c时钟线所需的时钟频率,i2c设备的从地址等信息,即获取了系统i2c控制器的信息,后面需要使用这些信息去初始化i2c adapter结构体。具体描述如下图所示:
smdk6410_machine_init(void)中做的另一项工作是通过i2c_register_board_info()函数将i2c从设备的信息收集起来。
int __init i2c_register_board_info(int busnum,struct i2c_board_info const *info, unsigned len)
{
int status; down_write(&__i2c_board_lock); /* dynamic bus numbers will be assigned after the last static one */
if (busnum >= __i2c_first_dynamic_bus_num)
__i2c_first_dynamic_bus_num = busnum + ; for (status = ; len; len--, info++) { /*
#include <linux/rwsem.h>
*/
struct i2c_devinfo *devinfo; devinfo = kzalloc(sizeof(*devinfo), GFP_KERNEL);
if (!devinfo) {
pr_debug("i2c-core: can't register boardinfo!\n");
status = -ENOMEM;
break;
} devinfo->busnum = busnum;
devinfo->board_info = *info;
list_add_tail(&devinfo->list, &__i2c_board_list);
} up_write(&__i2c_board_lock); return status;
}
/*
i2c_register_board_info(0, i2c_devs0, ARRAY_SIZE(i2c_devs0));
i2c_register_board_info(1, i2c_devs1, ARRAY_SIZE(i2c_devs1));
*/
struct i2c_board_info {
char type[I2C_NAME_SIZE];
unsigned short flags;
unsigned short addr;
void *platform_data;
struct dev_archdata *archdata;
struct device_node *of_node;
int irq;
};
struct i2c_devinfo {
struct list_head list;
int busnum;
struct i2c_board_info board_info;
};
#define I2C_BOARD_INFO(dev_type, dev_addr) .type = dev_type, .addr = (dev_addr)
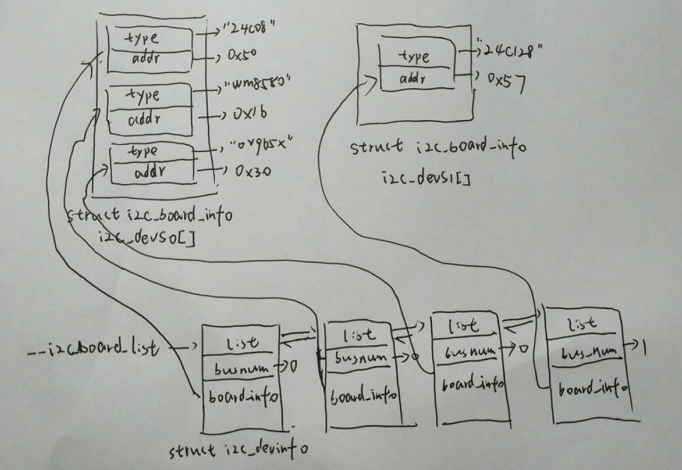
static struct i2c_board_info i2c_devs0[] __initdata = {
{ I2C_BOARD_INFO("24c08", 0x50), },
{ I2C_BOARD_INFO("wm8580", 0x1b), }, { I2C_BOARD_INFO("ov965x", 0x30), }, // gjl
}; static struct i2c_board_info i2c_devs1[] __initdata = {
{ I2C_BOARD_INFO("24c128", 0x57), }, /* Samsung S524AD0XD1 */
};
执行完i2c_register_board_info(0, i2c_devs0, ARRAY_SIZE(i2c_devs0));i2c_register_board_info(1, i2c_devs1, ARRAY_SIZE(i2c_devs1));这两个函数后,建立起如下的一个i2c_devinfo结构体类型的链表,链表头为__i2c_board_list,创建i2c_client结构体时会使用这些信息,每一个i2c_devinfo结构体对应一个i2c_client设备:
I2C驱动框架(三)的更多相关文章
- I2C驱动框架(四)
参考:I2C子系统之platform_driver初始化——I2C_adap_s3c_init() 在完成platform_device的添加之后,i2c子系统将进行platform_driver的注 ...
- I2C驱动框架 (kernel-3.4.2)
先用韦老师的图: 注: 新版本内核的i2c驱动框架采用了 i2c_client -------> i2c_bus_type <-------- i2c_driver 框架 如 ...
- Linux I2C驱动分析(三)----i2c_dev驱动和应用层分析 【转】
本文转载自:http://blog.chinaunix.net/uid-21558711-id-3959287.html 分类: LINUX 原文地址:Linux I2C驱动分析(三)----i2c_ ...
- STC8H开发(七): I2C驱动MPU6050三轴加速度+三轴角速度检测模块
目录 STC8H开发(一): 在Keil5中配置和使用FwLib_STC8封装库(图文详解) STC8H开发(二): 在Linux VSCode中配置和使用FwLib_STC8封装库(图文详解) ST ...
- I2C驱动框架(kernel-2.6.22.6)
以用i2c通信的实时时钟为例 框架入口源文件:i2c_m41t11.c (可根据入口源文件,再按着框架到内核走一遍) 内核版本:linux_2.6.22.6 硬件平台:JZ2440 以下是驱动框架 ...
- Linux 驱动框架---i2c驱动框架
i2c驱动在Linux通过一个周的学习后发现i2c总线的驱动框架还是和Linux整体的驱动框架是相同的,思想并不特殊比较复杂的内容如i2c核心的内容都是内核驱动框架实现完成的,今天我们暂时只分析驱动开 ...
- 【Linux高级驱动】I2C驱动框架分析
1.i2c-dev.c(i2c设备驱动组件层) 功能:1)给用户提供接口 i2c_dev_init //入口函数 /*申请主设备号*/ register_chrdev(I2C_MAJOR(), &q ...
- I2C驱动框架(二)
参考:I2C子系统之I2C bus初始化——I2C_init() 在linux内核启动的时候最先执行的和I2C子系统相关的函数应该是driver/i2c/i2c-core.c文件中的i2c_init( ...
- Linux I2C驱动框架
Linux的I2C体系结构分为3个组成部分: I2C核心( i2c-core.c ): I2C核心提供了I2C总线驱动和设备驱动的注册.注销方法.I2C通信方法("algorithm&qu ...
随机推荐
- java isAssignableFrom instanceof 小结 专题
一句话总结: isAssignableFrom()方法是从类继承的角度去判断,instanceof()方法是从实例继承的角度去判断. public native boolean isAssignabl ...
- IBatis.net特性展示代码
最近公司计划设计新业务平台架构.数据访问层框架要使用ibatis.net.头让我做些例子给其他同事演示下 ibatis的基本特性.然后评估下看是否使用.本来以后上官方下载NPetshop演示下就行了那 ...
- arcgis jsapi接口入门系列(6):样式
symbol: function () { //线样式 //样式详情请看官方文档 let style = { //线颜色,支持多种格式: //CSS color string:例如"dodg ...
- Android 如何通过Retrofit提交Json格式数据
本文将介绍如何通过retrofit库post一串json格式的数据.首先post的json数据格式如下: { "Id": "string", "Dev ...
- freebsd安装snmp
pkg_add http://ip地址/pub/FreeBSD/ports/packages/Latest/net-snmp.tbzFetching http://ip地址/pub/FreeBSD/p ...
- mac下相关操作命令
查看端口使用情况 lsof -i tcp:
- jdbc接口的一种类比——打酱油
jdbc很简单,这里只是为了方便自己的记忆.模型也许有缺陷,但本质是相同的. jdbc可以屏蔽数据库的底层的不同,让我们有能力用java语言统一访问不同的数据库.就像打酱油一样,可以去超市买,也可以去 ...
- nmon安装和使用介绍
使用参考地址:百度中搜索 nmon 博客园 使用文档参考地址:http://nmon.sourceforge.net/pmwiki.php?n=Site.Documentation nmmon地址:h ...
- nginx 编译某个模板的问题./configure: error: SSL modules require the OpenSSL library. You can either do not enable the modules, or install the OpenSSL library into the system, or build the OpenSSL library stati
root@hett-PowerEdge-T30:/usr/local/src/nginx-1.9.8# ./configure --prefix=/usr/local/nginx --add-mod ...
- UVA821 PageHopping (Floyd)
求所有点直接的平均最短距离,保存一下出现过的点,题目保证是所有点连通,Floyd求出最短路以后两个for统计一下. #include<bits/stdc++.h> using namesp ...